通过 SBG Systems 增强移动测绘解决方案
借助我们的 Navsight Apogee 解决方案(由 Qinertia PPK 软件提供支持),VSK Global 可以向最终用户提供其移动测绘系统中的整个软件包,从数据收集到设计和定制,从而专注于数字孪生、洪水模拟、智能农业和净零排放。
“我的第一个 Apogee 自 2018 年集成以来,至今仍在工作,没有任何问题。” | VSK Global 首席执行官 Pathida Virasakdi。
VSK Global 与 SBG Systems 的合作已被证明具有战略意义,可为其客户提供高性能的移动测量和卓越的价值。

VSK Global:泰国领先的系统集成商
我们的客户 VSK Global Company Limited 是泰国领先的系统集成商。他们专注于 GNSS、SLAM、MMS、USV 和 UAV 技术,已成为水文、农业和基础设施开发等多个行业的主要参与者。
作为 SBG 解决方案的经销商,VSK Global 以向其客户提供全面的移动测绘和测深测量解决方案而闻名。
为最终用户提供价值
VSK Global 解决方案的最终用户,包括水文信息研究所和 Bedrock Analytics,都从 SBG Systems 产品的可靠性和易用性中受益匪浅。
VSK 影响的一个主要例子可以通过他们与泰国主要政府机构水文信息研究所 (HII) 的合作来看出。HII 的关键任务包括预防和管理全国范围内的涉水风险。
鉴于泰国容易发生洪水,HII 是负责绘制洪水风险区域、进行洪水后损失评估以及监测堤坝等防洪基础设施维护的主要机构。

这种合作关系表明,VSK Global 对我们惯性导航解决方案的实施如何直接促进重要的公共安全和基础设施管理计划。
我们如何应对这项移动测绘挑战
VSK Global 面临着一个重大挑战:他们需要一个能够在具有挑战性的环境中完美运行的惯性导航系统 (INS)。这些环境包括高层建筑区域、桥下和长隧道中,这些环境是移动测绘系统和测深测量等应用的典型环境。这就是我们参与其中的原因。
无缝集成和卓越的支持
我们与 VSK Global 的合作始于坚实的教育和支持基础。我们花时间培训 VSK Global 的团队,并为系统设计和集成提供了宝贵的建议。
最初的合作为成功的伙伴关系奠定了基础,我们的产品无缝集成到 VSK Global 的 移动测绘系统中,其中包括激光扫描仪和 360 度相机。
在整个集成阶段,VSK Global 获得了所有必要的帮助,并发现支持门户非常有用。据 VSK 称,SBG Systems 提供的技术支持及时高效。他们很快确认我们的 Apogee-D 和基于 Horizon FOG 的 IMU 符合他们的期望。
在选择哪家公司能够提供最佳解决方案的研究阶段,他们发现 Apogee-D 的性能超过了其他品牌,这是他们决定与我们合作的一个关键因素。
“我尝试从‘知识库’中获取更多关于我可能遇到的问题或疑问的信息。然后,如果‘知识库’中的这些解释对我来说不清楚,我会联系技术人员,他们通常会解决我的所有问题。”VSK Global的首席执行官Pathida Virasakdi总结道。
VSK 的反馈和我们产品的功能
- VSK Global 称赞该硬件易于集成,并且软件 Qinertia 文档齐全且直观。这种组合使他们的设计过程更轻松、更快速,并且几乎无需维护。
- 他们强调了 Apogee-D 和我们基于FOG的IMU的航向精度,这是他们决策过程中的一个关键因素。
- 鉴于需要收集数千公里的数据,SBG Systems 产品的后处理动态 (PPK) 性能也是一个关键考虑因素,并受到了高度赞扬。
结论:移动测绘系统的卓越性
VSK Global 与我们合作的成功案例证明了合作、创新和出色支持的力量。
随着 VSK Global 继续推动移动测绘解决方案的边界,他们与我们的合作将毫无疑问地在他们持续的成功以及整个移动测绘市场中发挥关键作用。



Apogee
Apogee-D 是一种先进的惯性导航系统 (INS)。它具有双天线、三频 GNSS 接收器,支持 GPS、GLONASS、BEIDOU 和 GALILEO 星座。
该系统在各种移动应用中表现出色。这归功于 MEMS 传感器与 GNSS 的结合,可在具有挑战性的环境中提供精确的位置、方向和速度数据。
它在包括自动驾驶汽车、战场管理、移动测绘和地理空间测量在内的多个领域中被证明是宝贵的。更不用说,它对 GNSS 干扰的抵抗力使其特别适用于无人机、飞机导航和海上作业。

咨询 Apogee-D 报价
您有疑问吗?
欢迎访问我们的常见问题解答 (FAQ) 专区!在这里,您可以找到关于我们展示的应用的最常见问题的答案。如果您找不到您要查找的内容,请随时直接与我们联系!
什么是 GNSS 后处理?
GNSS 后处理或 PPK 是一种方法,其中在数据采集活动之后处理 GNSS 接收器上记录的原始 GNSS 数据测量值。它们可以与其他 GNSS 测量源结合使用,从而为该 GNSS 接收器提供最完整和最准确的运动轨迹,即使在最具挑战性的环境中也是如此。
这些其他来源可以是数据采集项目处或附近的本地 GNSS 基站,也可以是通常由政府机构和/或商业 CORS 网络提供商提供的现有连续运行参考站 (CORS)。
后处理动态 (PPK) 软件可以利用免费提供的 GNSS 卫星 轨道和时钟信息,以帮助进一步提高精度。PPK 允许精确确定本地 GNSS 基站在所使用的绝对全局坐标参考框架基准中的位置。
PPK软件还可以支持不同坐标参考框架之间的复杂转换,以支持工程项目。
换句话说,它可以访问更正,提高项目的准确性,甚至可以在任务后修复测量或安装期间的数据丢失或错误。
什么是水深测量?
测深是对水下地形的深度和形状进行研究和测量的学科,主要侧重于绘制海底和其他水下地貌。它是水下地形的等效物,提供了对海洋、湖泊和河流的水下特征的详细了解。测深在各种应用中起着至关重要的作用,包括导航、海洋建设、资源勘探和环境研究。
现代测深技术依赖于声纳系统,例如单波束和多波束回声测深仪,它们使用声波来测量水深。这些设备向海底发送声波脉冲,并记录回声返回所需的时间,根据水中声速计算深度。特别是多波束回声测深仪,可以一次绘制大片海底地图,从而提供高度详细和准确的海底表示。通常,RTK + INS 解决方案与此相关联,以创建精确定位的海底 3D 测深表示。
水深数据对于创建航海图至关重要,它通过识别潜在的水下危险(如水下岩石、沉船和沙洲)来帮助安全引导船只。它还在科学研究中发挥着至关重要的作用,帮助研究人员了解水下地质特征、洋流和海洋生态系统。
RTK 和 PPK 之间有什么区别?
实时动态 (RTK) 是一种定位技术,其中 GNSS 校正以近乎实时的方式传输,通常使用 RTCM 格式的校正流。但是,在确保 GNSS 校正(特别是其完整性、可用性、覆盖范围和兼容性)方面可能存在挑战。
与 RTK 后处理相比,PPK 的主要优势在于可以在后处理期间优化数据处理活动,包括正向和反向处理,而在实时处理中,校正及其传输中的任何中断或不兼容都会导致较低的定位精度。
GNSS 后处理 (PPK) 与实时 (RTK) 的第一个关键优势是,现场使用的系统不需要数据链路/无线电来将来自 CORS 的 RTCM 校正馈送到 INS/GNSS 系统 中。
后处理应用的主要限制是最终应用程序需要对环境做出反应。另一方面,如果您的应用程序可以承受生成优化轨迹所需的额外处理时间,它将大大提高所有交付的数据质量。
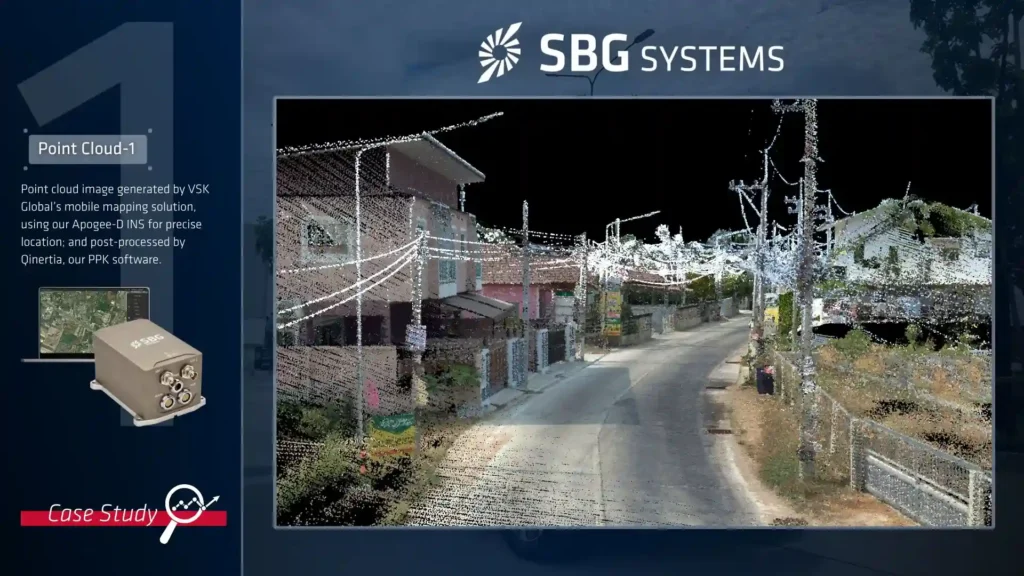
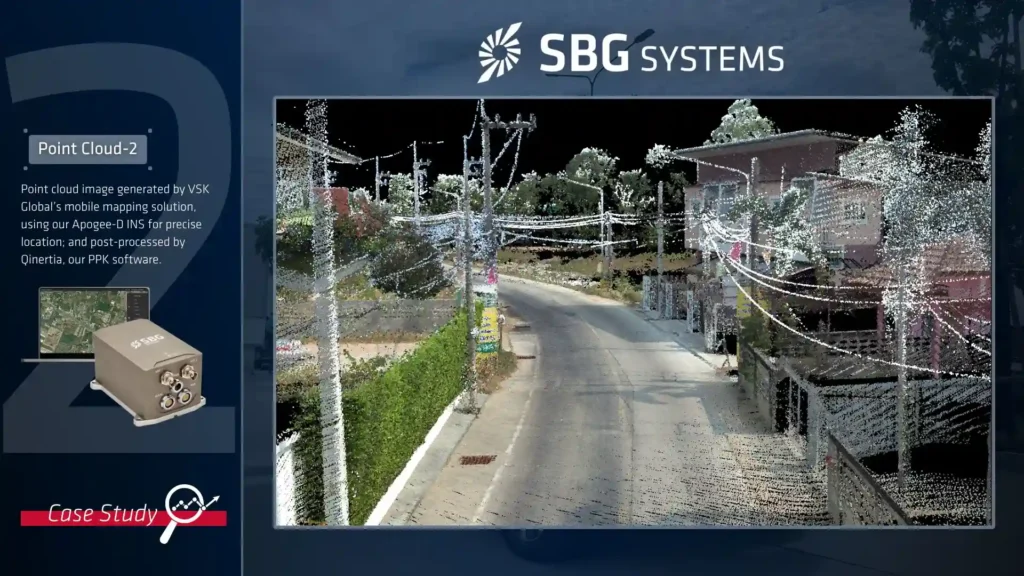
什么是点cloud?
点云是三维空间中数据点的集合,用于表示物体或环境的外部表面。每个点包含特定的 X、Y 和 Z 坐标,并且可以包含其他信息,例如颜色、强度或反射值。
这些数据集可以包含数百万或数十亿个点,通常由 3D 扫描仪或其他传感设备创建。 点云是各种应用中的重要工具,包括 3D 建模和可视化、建筑信息建模 (BIM)、自动驾驶车辆导航以及质量检查和控制,使其成为现代空间数据收集和分析的基本组成部分。
点云数据和 LiDAR 技术之间有什么关系?
LiDAR 技术和点 cloud 数据本质上是相互关联的,因为 LiDAR 传感器通过发射激光脉冲并测量其返回时间来创建点 cloud。每个反射的激光脉冲都会成为三维空间中的一个点,具有特定的 X、Y 和 Z 坐标。
这些传感器每秒可以收集数百万个点,生成高度详细的点 cloud 数据集,这些数据集代表扫描的环境。生成的点 cloud 对于各种应用非常有价值,包括 3D 绘图、地形分析、建筑物测量和自动驾驶车辆导航系统,这使得 LiDAR 成为生成准确而详细的物理世界点 cloud 表示的主要技术之一。