
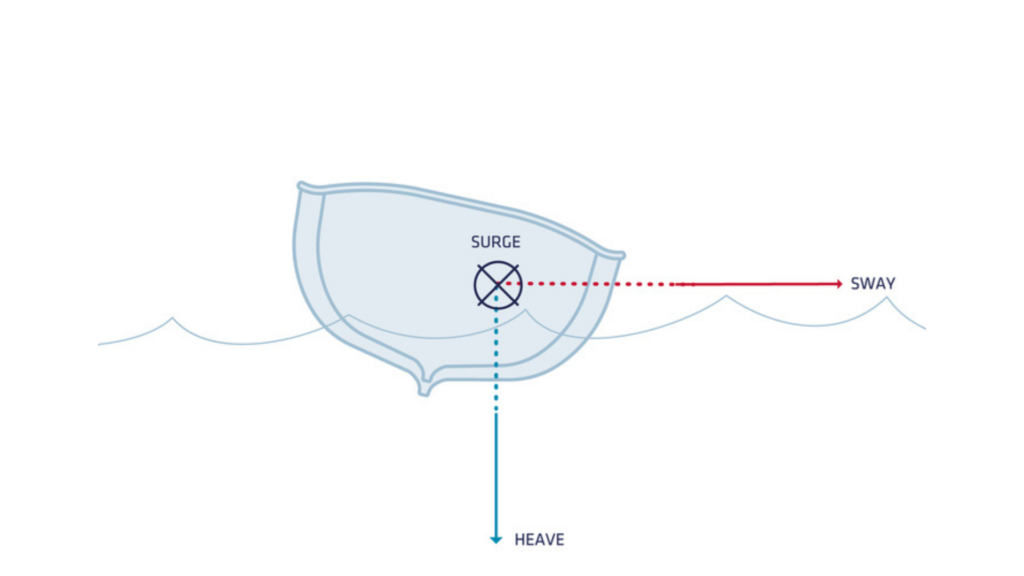
Heave(ヒーブ)とは、海洋アプリケーションに特有のモーション計測です。波の作用による船舶の上下運動を指し、船舶の重心における平均値をゼロと仮定して、ローカルの垂直軸に沿った線形変位として計測されます。
リアルタイムおよびディレイHeaveアルゴリズムに大幅なアップグレードが適用されました。
当社のHeaveアルゴリズムの詳細と、その正しい設定方法については、サポートセンターのナレッジベースページをご覧ください。
最近の開発
当社の現在のリアルタイムおよび遅延Heaveアルゴリズムは、すでに業界をリードしており、最高の仕様を備えています。ただし、精度をさらに向上させるために大幅な改善を行いました。ファームウェアバージョン5.1で導入された最新の進歩では、回転中心(COR)からIMU(Inertial Measurement Unit)までの距離を使用しており、リアルタイムおよび遅延Heaveアルゴリズムの両方で次の利点が得られます。
- パフォーマンスの向上:
- リアルタイム・ヒーブの精度が5cmから4cmに向上。
- 遅延ヒーブ精度が2.5 cmから2 cmに向上
- 柔軟なIMU設置:CORまでの距離が提供されていれば、IMUを船のどこにでも設置できるようになりました。これは、IMUを船のCORの近くに配置する必要があった以前のバージョンからの大幅な改善です。これは、大型船にとっては課題でした。
- 困難な海象条件下での動作改善:より厳しい海象条件でも、最高の性能を維持します。
新しいアルゴリズムの検証
特に高精度を目指す場合、ヒーブ性能の評価は本質的に困難です。これにどのように対処したかをご紹介します。
評価プロセス
同一海底領域を繰り返し通過して得られた水深測量データセットの比較など、複数の評価を実施しました。これらの評価は、当社の顧客でありパートナーであるNorbit社の協力のもと行われました。
- 水深測量評価:同じ領域上の複数の測量線を比較することにより、Heave性能の上限を確立しました。この方法では、INSの位置および角度測定、マルチビームソナー、およびその他のソースからのエラーを含む、取得チェーン全体のエラーが考慮されます。
- ポストプロセッシング検証:Qinertiaポスト処理GNSSデータを使用して、新しい遅延Heaveアルゴリズムもテストしました。その結果、新しいアルゴリズムはRTKと同等の性能を発揮することがわかりました。
結果と結論
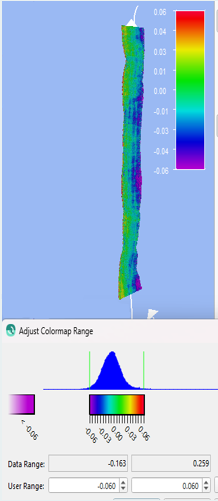
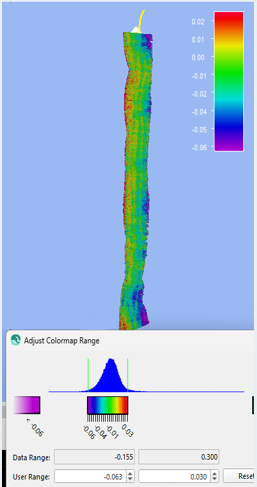
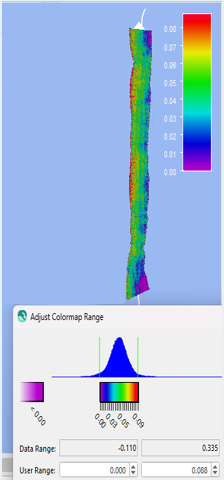
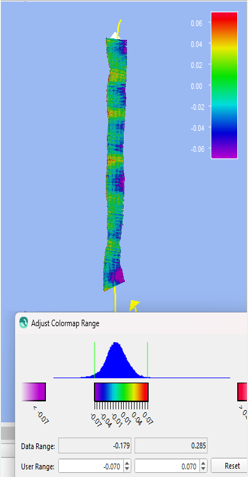
次のスクリーンショットは、新旧のアルゴリズムのバージョンを並べて比較したものです。カラースケールは異なりますが、記載されている統計から改善が見られることが明確にわかります。旧型のHeaveアルゴリズムには、異常な海象と大型船舶のセットアップが原因で視覚的なアーチファクトが見られましたが、値は仕様範囲内でした。
新旧アルゴリズムバージョンの比較

これらの評価により、当社の新しいヒーブアルゴリズムの性能が大幅に向上し、さまざまな条件で優れた精度と信頼性が得られることが確認されました。
リアルタイムおよび遅延ヒーブ測定の両方の改善
性能向上については以下の表にまとめられており、リアルタイムおよび遅延ヒーブ測定の両方において明確な改善が見られます。
| 旧リアルタイムHeave | 新しいリアルタイムHeave | 旧遅延Heave | 新しいディレイドヒーブ | PPKリファレンス | |
|---|---|---|---|---|---|
| 平均 | 4 cm | 3 cm | 4 cm | 1 cm | 1 cm |
| 標準偏差 | 4 cm | 2 cm | 2 cm | 2 cm | 2 cm |
これらの機能強化により、当社の高性能製品ラインでは以下が保証されます。
- リアルタイム・ヒーブのアプリケーションで4cmの精度を達成。
- 主要な水路ソフトウェアパッケージでサポートされ、遅延Heaveに対応したマッピングアプリケーションは、2cmの精度を達成します。
さらに、海洋ユニットで利用可能なHeave強化高度機能は、これらの改善の恩恵を受けるでしょう。これらの機能強化はすべて、Qinertia 4ポストプロセッシングソフトウェアと、ファームウェアバージョン5.1以降の高性能製品で利用できます。これらの改善は、まもなくEllipse製品群にも拡張される予定です。