
Qinertia GNSS+INSポストプロセッシングソフトウェア(PPK)
高精度をよりシンプルに
地理空間イノベーションの最前線へようこそ。Qinertia PPKソフトウェアは、高精度測位ソリューションにおける全く新しいレベルを提供します。妥協のない精度が求められる現代において、当社のPPKソフトウェアは、位置データに対する比類なき信頼性を求める専門家や産業界にとって、基礎となるものとして登場しています。
実際に機能する後処理ソフトウェア
生の位置データを後処理することにより、ワークフローにおいて比類なき精度を実現します。Qinertiaは、地理空間測量、マッピング、水路測量など、センチメートルレベルの精度が要求されるアプリケーションに不可欠です。





アプリケーションの範囲
SBG Systemsの強力なPPK(Post-Processing Kinematic:後処理キネマティック)ソフトウェアであるQinertiaは、広範なアプリケーションにおいてGNSS/INSデータの精度を向上させるように設計されています。
UAVマッピングやモバイル測量から、海洋オペレーションや自動運転車のテストまで、Qinertiaは地理空間の専門家に、信頼性の高いセンチメートルレベルの位置情報を提供します。いつでも、どこでも。Qinertiaがお客様のミッションにどのように精度と信頼性をもたらすかをご覧ください。
機能性
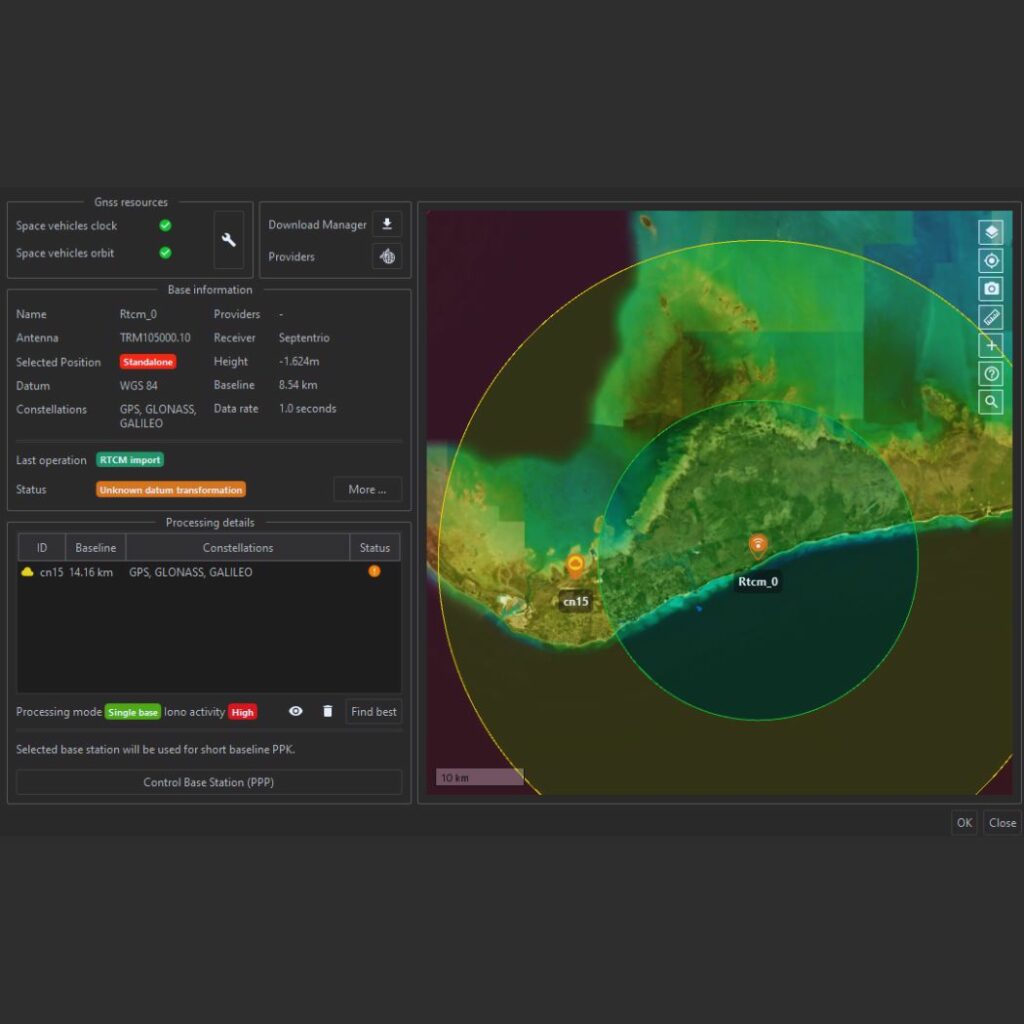
基地局カバレッジマップ
非常にユーザーフレンドリーでありながら、汎用性も兼ね備えています。豊富な種類の事前設定された座標参照系(CRS)をご用意しています。
新しい測地エンジン
Qinertiaの新しいGeodesy Engineは、信じられないほどユーザーフレンドリーであるだけでなく、非常に用途の広いツールを網羅的に備えています。
Qinertiaは、事前に構成された座標参照系(CRS)を豊富に選択できるため、プロジェクトに不可欠な公式システムと変換を利用できます。また、お客様固有の要件または科学的要件に合わせてカスタマイズされた変換を作成することもできます。
IonoShieldモード
QinertiaのIonoShieldモードは、ログ内の電離層活動の管理方法に革命をもたらします。電離層の状態の監視がこれまでになく簡単になりました。
電離層活動とベースライン長を容易に評価できるようになり、データに最適な処理モードについて、十分な情報に基づいた意思決定を行うことができます。
拡張されたCORS統合
世界中に5300の基地局を持つSmartNet CORSネットワークにアクセスできるようになりました(別途サブスクリプションが必要です)。
SmartnetアクセスはQinertiaにシームレスに統合されており、このテクノロジーをお客様に最適な方法で活用できる柔軟性と利便性を確保します。
ライブRTCMによるPPK
リアルタイムオペレーションで使用されるRTCM補正でデータを処理することにより、PPKワークフローで比類のない精度を実現できます。この機能は、リアルタイムのシングルベースシナリオ専用に設計されており、VBSセットアップとは互換性がないことに注意してください。
QinertiaのRTCMストリームは、精度を再定義し、PPKのオプションを増やします。
RTSスムージング
センサーフュージョンステップの後にINS軌跡を改良するために設計された高度な処理オプション。スムーザーを適用することにより、Qinertiaはすべての急激なトランジションと突然のジャンプを除去し、最終的な軌跡出力がより正確になるだけでなく、大幅にスムーズで連続的になるようにします。

正確な結果を容易に実現するPPK
当社のPPK後処理ソフトウェアは、直感的なインターフェースとガイド付きワークフローにより、すべてのユーザーにシームレスな体験を提供します。迅速なプロジェクト設定、ドラッグアンドドロップによるデータ入力、および自動の「最適」基地局選択によりタスクが簡素化され、高度なオプションは専門家に対応します。フィードバックに基づく定期的な更新により、継続的な改善とユーザー中心の機能が保証されます。

基地局管理
Qinertiaは、164か国にわたる最大10,000の基地局のネットワークへのダイレクトアクセスをユーザーに提供し、正確な後処理機能を保証します。カスタム基地局をインポートする場合、PPP基地局制御機能は、精密測位技術を使用してその座標を積極的に検証し、精度と信頼性を高めます。
PPK処理モード
Qinertia PPK処理モードには、ローカライズされた精度を実現する単一基地局の短いベースライン、より良い結果のために電離層干渉を軽減する単一基地局Ionoshieldモード、専門家によるコリドーマッピングのための仮想基地局が含まれており、どこへ行くにも一貫した測位のために緊密に結合されたPPPを利用しています。
ユーザー重視のソフトウェア
Qinertiaは、迅速なセットアップと効率的な操作のために設計された、最新のユーザーフレンドリーなインターフェースを備えています。その高度なツールセットは、正確な後処理機能、堅牢なエラーモデリング、シームレスなデータ統合をサポートします。ユーザーからのフィードバックに基づいて定期的なアップデートが行われ、機能が継続的に強化され、進化する業界のニーズに対する最適なパフォーマンスと互換性が保証されます。
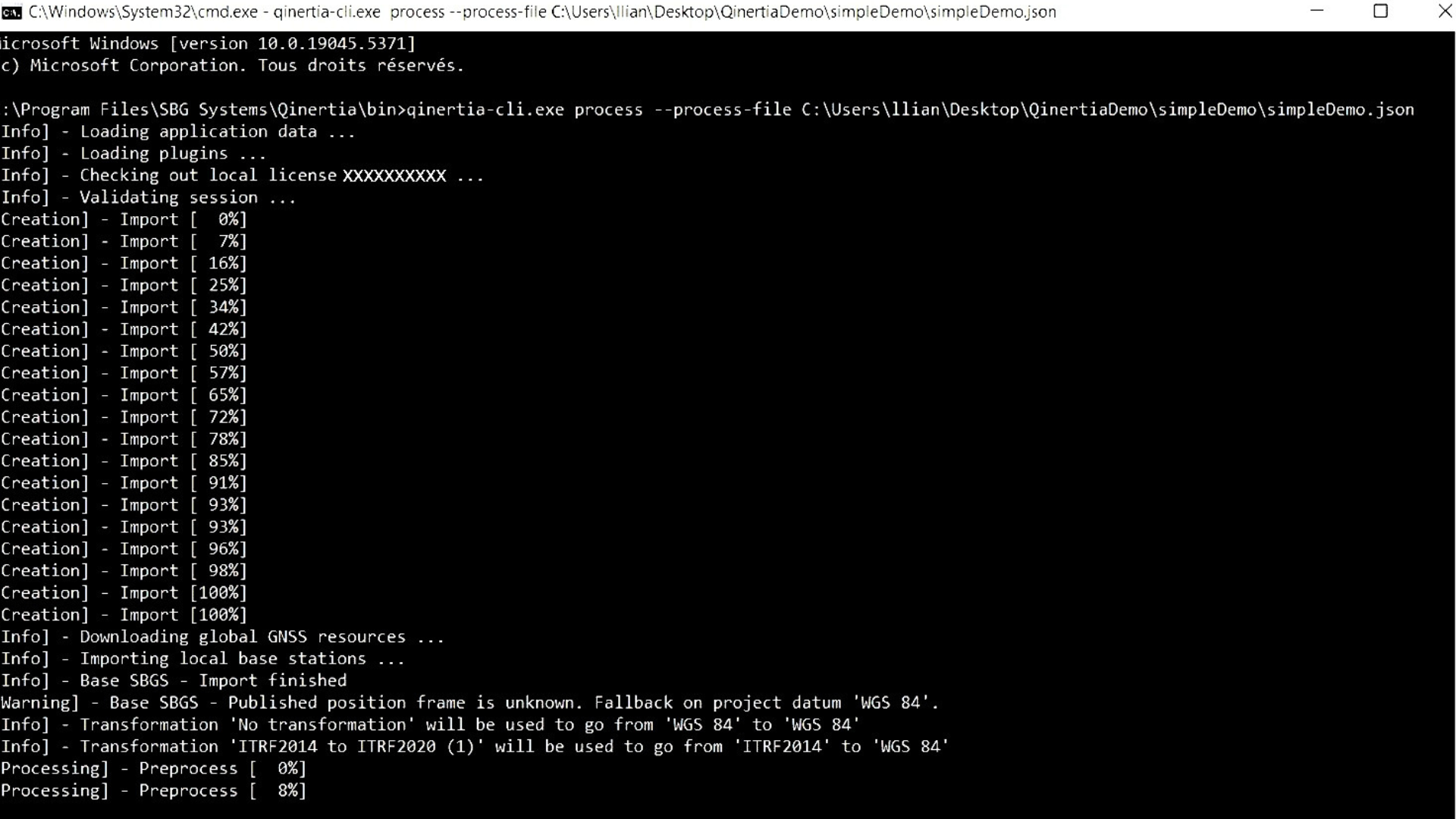
容易なワークフロー統合
ソフトウェア開発者は、Qinertia Cloud APIまたはQinertia CLIを使用して、Qinertia の強力な PPK 機能をアプリケーションにシームレスに統合できます。直感的なインターフェースにより操作が簡素化され、コマンドラインインターフェース(CLI)により反復的なデータ処理が効率化されます。開発者は出力形式をカスタマイズし、詳細なレポートを生成できるため、既存のワークフローとのスムーズな統合が保証されます。
より多くの機能
SBG Systems の Qinertia PPK ソフトウェアで、GNSS データ処理の革新的なアプローチをご体験ください。その強力な機能は、お客様の業務を新たな高みへと引き上げるために特別に設計されています。
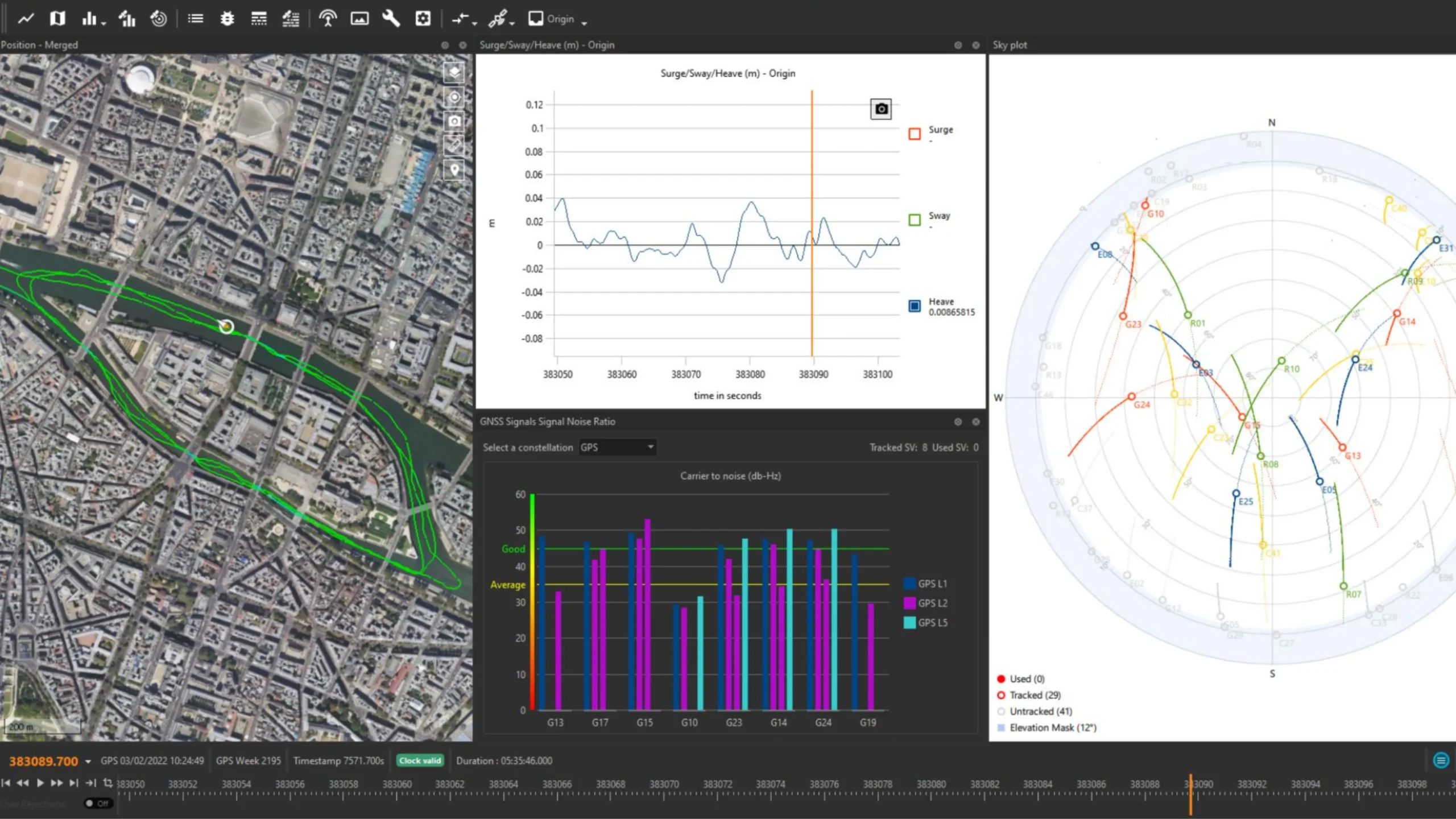
高度な GNSS 表示と設定
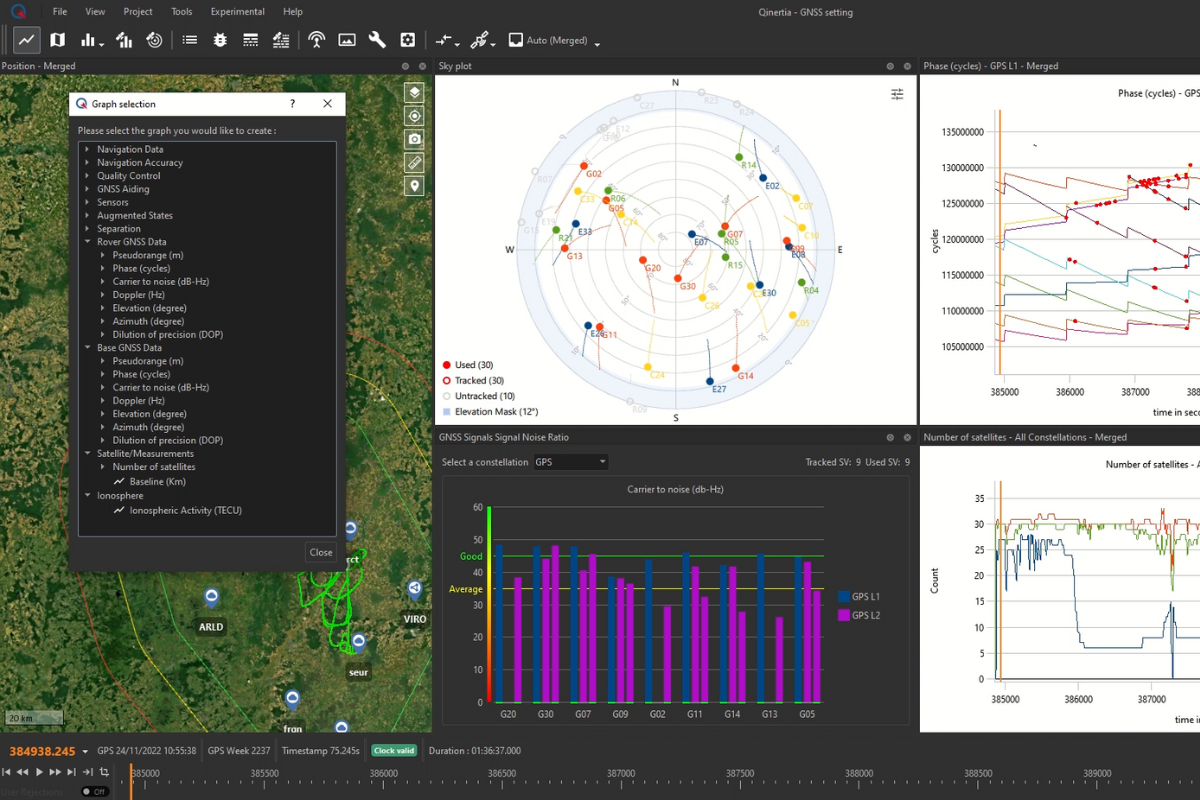
Qinertia は、信号品質の低い衛星をインテリジェントに排除することで、PPK の精度を自動的に向上させ、最高品質のデータのみが計算に使用されるようにします。さらに、ユーザーは PPK ソリューション内で個々の衛星、信号バンド全体、またはコンステレーション全体を手動で無効にすることで、自ら管理できるようになりました。
これらの高度な機能をサポートするために、GNSS 信号品質を簡単に評価できるさまざまな情報グラフを導入しました。Qinertia の高度な GNSS 設定と表示により、GNSS データを完全に制御し、自信を持って利用できます。
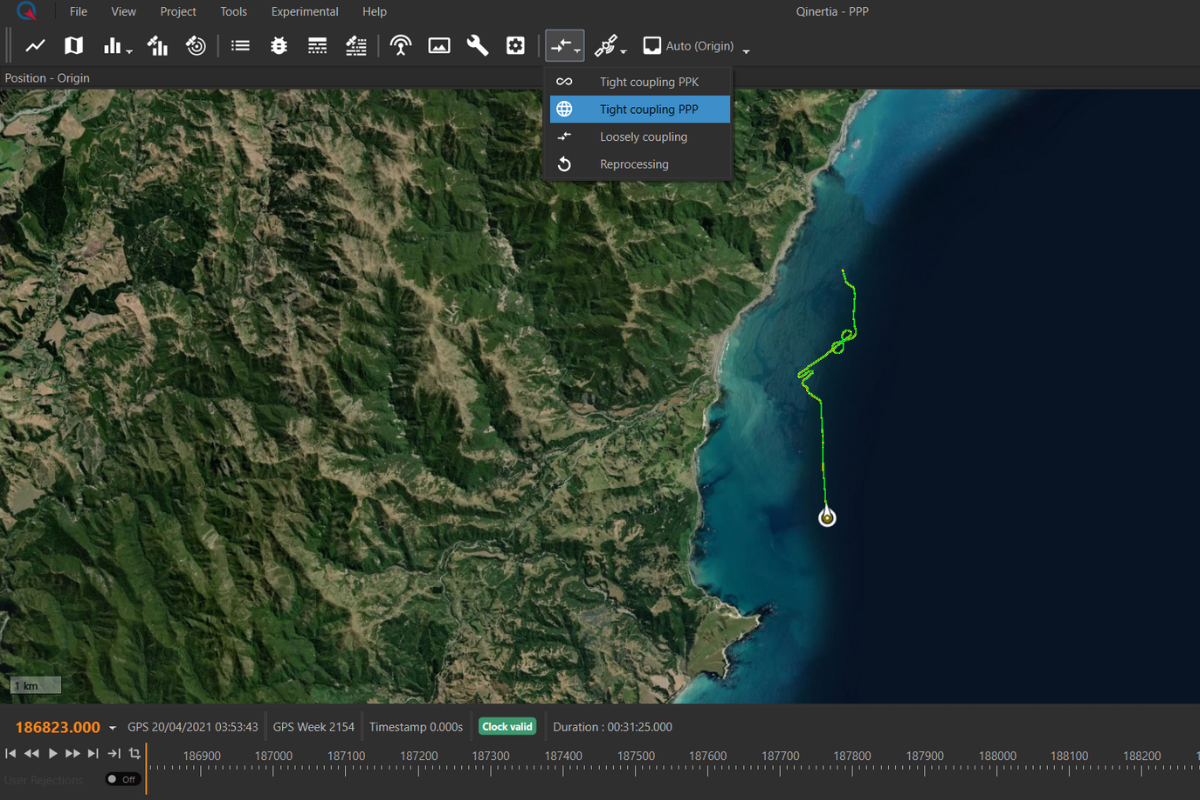
緊密に結合されたPPP
Qinertia のタイトカップリング PPP は、ミッションからわずか 24 時間後に利用可能になりました。SBG の PPP アルゴリズムをタイトカップリングと統合することで、計算精度が新たなレベルに引き上げられます。
リアルタイム性能が向上するだけでなく、ミッション後のデータ分析も大幅に改善されます。
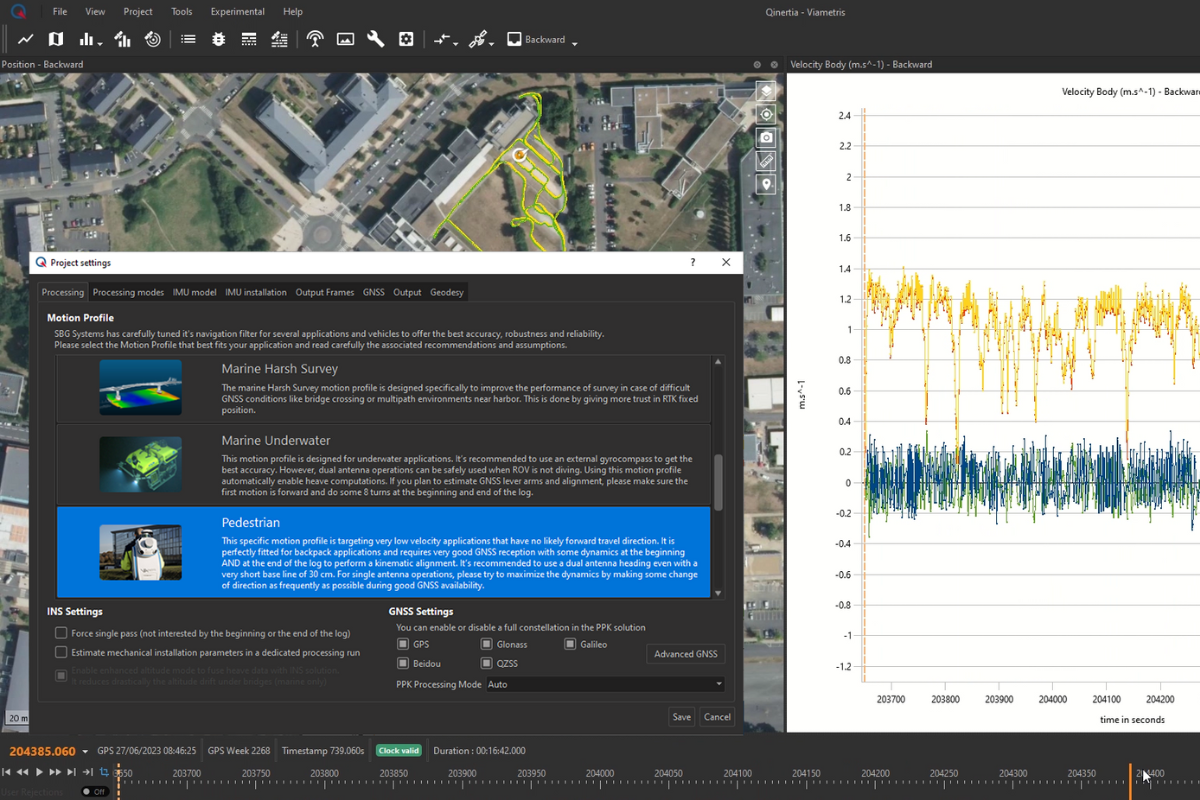
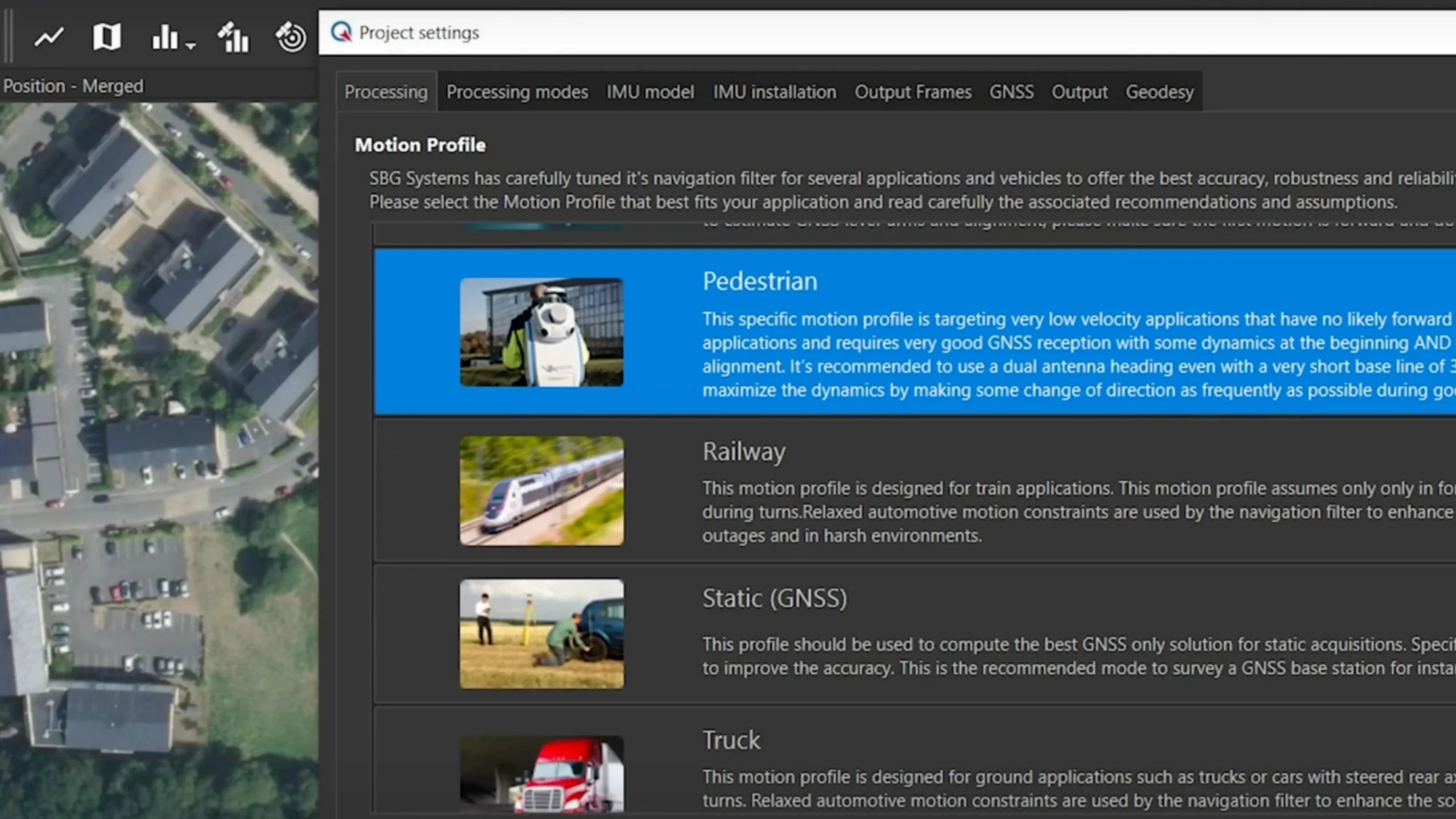
歩行者用シングルアンテナモード
低ダイナミックシナリオやシングルアンテナの利用事例でお客様のエクスペリエンスを向上させるように設計された、画期的な機能です。
歩行者モーションプロファイルでは、Qinertia はヘディングを容易に調整し、ダイナミクスの低い状況でも最適な精度を保証し、バックパックマッピングの可能性を広げます。歩行者アライメントは、待ち望んでいた新しいソリューションです。
当社の異なるエディション
プロジェクトのニーズに合わせて、最適なエディションの Qinertia PPK ソフトウェアをお選びください。大規模なインフラ調査、高精度マッピング、または正確な GNSS ポスト処理を必要とするプロジェクトのいずれに取り組んでいる場合でも、Qinertia は柔軟なオプションを提供します。
各エディションは、生の GNSS データを処理し、わずか数クリックでセンチメートルレベルの精度を実現するための強力な機能を提供します。
| 処理の種類 | 処理の種類 GNSS のみ | 処理の種類 慣性 + GNSS | 処理の種類 慣性 + GNSS | 処理の種類 慣性 + GNSS |
|---|---|---|---|---|
| SBG IMU のサポート | SBG IMU のサポート – | SBG IMU のサポート Ellipse のみ | SBG IMU のサポート Ellipse & Quanta シリーズ (Quanta Micro/Plus/Extra) | SBG IMU のサポート すべての SBG およびサードパーティ製 IMU |
| サードパーティ製 IMU | サードパーティ製 IMU – | サードパーティ製 IMU – | サードパーティ製 IMU – | サードパーティ製 IMU ● |
| アプリケーション | アプリケーション すべて | アプリケーション 陸上および航空 | アプリケーション 航空 | アプリケーション すべて |
| ライセンス | ライセンス 永続またはサブスクリプション | ライセンス 永続またはサブスクリプション | ライセンス 永続またはサブスクリプション | ライセンス 永続またはサブスクリプション |
| 同時処理 | 同時処理 1 | 同時処理 1 | 同時処理 1 | 同時処理 1 |
| オフライン処理 | オフライン処理 ● | オフライン処理 ● | オフライン処理 ● | オフライン処理 ● |
| サーバー処理 | サーバー処理 – | サーバー処理 – | サーバー処理 – | サーバー処理 – |
| インターフェース | インターフェース GUI + CLI | インターフェース GUI + CLI | インターフェース GUI + CLI | インターフェース GUI + CLI |
| モーションプロファイル | モーションプロファイル 静止 (GNSS)、空 (UAV、飛行機、ヘリコプター)、陸 (自動車、トラック、鉄道)、海洋 (船舶、海洋過酷測量、水中)、歩行者 | モーションプロファイル 静止 (GNSS)、空 (UAV、飛行機、ヘリコプター)、陸 (自動車、トラック、鉄道)、歩行者 | モーションプロファイル 静止 (GNSS)、空 (UAV、飛行機、ヘリコプター) | モーションプロファイル 静止 (GNSS)、空 (UAV、飛行機、ヘリコプター)、陸 (自動車、トラック、鉄道)、海洋 (船舶、海洋過酷測量、水中)、歩行者 |
| RTK、VBS、PPPの緊密な結合 | RTK、VBS、PPPの密結合 – | RTK、VBS、PPPの密結合 ● | RTK、VBS、PPPの密結合 ● | RTK、VBS、PPPの密結合 ● |
| 再処理 | 再処理 – | 再処理 ● | 再処理 ● | 再処理 ● |
| ルーズ結合 | 疎結合 – | 疎結合 ● | 疎結合 ● | 疎結合 ● |
| GNSS RTK&VBS&PPP | GNSS RTK&VBS&PPP ● | GNSS RTK&VBS&PPP ● | GNSS RTK&VBS&PPP ● | GNSS RTK&VBS&PPP ● |
| 基地局管理 | 基地局管理 ● | 基地局管理 ● | 基地局管理 ● | 基地局管理 ● |
| Geodesy engine | 測地エンジン ● | 測地エンジン ● | 測地エンジン ● | 測地エンジン ● |
| IonoShield | IonoShield ● | IonoShield ● | IonoShield ● | IonoShield ● |
| CORSネットワーク | CORSネットワーク ● | CORSネットワーク ● | CORSネットワーク ● | CORSネットワーク ● |
| レポート | レポート ● | レポート ● | レポート ● | レポート ● |
| Rinex診断 | Rinex診断 ● | Rinex診断 ● | Rinex診断 ● | Rinex診断 ● |
| レバーアーム推定 | レバーアーム推定 – | レバーアーム推定 ● | レバーアーム推定 ● | レバーアーム推定 ● |
| 統計 | 統計 ● | 統計 ● | 統計 ● | 統計 ● |




独自のソリューションを構築
Qinertia は、個人ユーザー、エンタープライズユーザー、システムインテグレーター、ソフトウェアエディター、サービスプロバイダーなど、すべてのユーザー向けに構築された次世代 INS/GNSS ポスト処理ソフトウェアです。
事前設定されたアプリケーションモーションプロファイルにより、セットアップが簡素化され、特定のニーズに合わせてパフォーマンスが最適化されます。
利用可能なすべてのソリューションから選択して、デスクトップ、OEM、クラウドとして活用できます。

容易な導入
Qinertia Desktop は、高度な分析ツールとカスタマイズ可能な設定を提供することにより、複雑なデータセットを効果的に処理するように設計されたデスクトップアプリケーションです。
ユーザーフレンドリーなインターフェースにより、データのインポート、処理、分析を迅速に行うことができます。
オフィスで作業する個人ユーザーまたはチームに最適です。

ハードウェアまたはソフトウェアとのシームレスな統合
Qinertia OEM は、スムーズな統合プロセスを提供し、強力な PPK 処理をお客様のソリューションに組み込むことを可能にします。これにより、ハードウェアメーカー、システムインテグレーター、サービスプロバイダーのいずれであっても、お客様は信頼性が高く効率的な高精度測位を容易に提供できます。
ソフトウェアインターフェース、ワークフロー、および機能をカスタマイズして、ブランドとユーザーの要件に合わせることができます。

柔軟でスケーラブルなリモート管理を実現。
Qinertia Cloud は、スケーラブルな PPK ソリューションを求める開発者、インテグレーター、および企業向けに設計されており、クラウドベースのテクノロジーの利便性と柔軟性を備え、高精度な後処理の可能性を最大限に引き出します。
カスタムアプリケーションの構築、オンラインサービスの提供、既存機能の拡張など、どのような場合でも、Qinertia Cloud API を使用することで、最高レベルの PPK パフォーマンスをユーザーに提供できます。
多数のサードパーティ製受信機との互換性
Qinertia は、Septentrio、Trimble、Novatel、Ublox、Topcon、Javad、Ashtec、Spectra GNSS 受信機など、生の GNSS データ*を提供できるサードパーティ製受信機と互換性があります。
すべての Qinertia 機能へのアクセス:GNSS 受信機のファイル形式の解析、GNSS PPK(オプションで慣性結合)、GNSS PPP(オプションで慣性結合)、すべてのグラフと分析の表示、利用可能なすべてのコンステレーションバンドを使用した PPK など。
*サポートされている GNSS 受信機:デュアルバンド以上(L1、L1+L2、L1+L5、L1+L2+L5)。
ドキュメントとリソース
すべての Qinertia ソリューションには、あらゆる段階のユーザーをサポートするように設計された包括的なドキュメントが付属しています。
インストールガイドから高度な構成やトラブルシューティングまで、明確で詳細なマニュアルにより、スムーズな統合と操作が保証されます。
Qinertia のガイドツアー
Qinertia のプロダクトマネージャーである Lea と一緒に、後処理ソフトウェアの詳細なツアーに参加しましょう。

Qinertia のデモをリクエストする



SBG Systemsについて
当社の慣性製品をプロジェクトに活用した業界のプロやクライアントからの経験談やお客様の声をご紹介します。
当社の革新的な技術が、いかに業務を変革し、生産性を向上させ、さまざまなアプリケーションで信頼性の高い結果をもたらしたかをご覧ください。
後処理ソフトウェアに関するFAQ
当社の後処理ソフトウェアに関する FAQ セクションでは、SBG Systems の高度な後処理ツールに関するよくある質問に対する包括的な回答を提供しています。このセクションでは、当社の後処理ソリューションの機能、統合、および利点に関する詳細な説明をご覧いただけます。ワークフローの最適化、互換性の理解、またはトラブルシューティングに関するヘルプが必要な場合でも、この FAQ は、プロジェクトにおける当社のソフトウェアのパフォーマンスを最大化するのに役立つ貴重な洞察を提供します。
回答を調べて、信頼性の高いデータ処理ソリューションで運用効率を高めましょう。
GNSS後処理とは何ですか?
GNSSポスト処理(PPK)は、GNSS受信機で記録された生のGNSSデータ計測値をデータ取得後に処理する手法です。これらのデータは、他のGNSS計測ソースと組み合わせることで、最も困難な環境下でも、そのGNSS受信機に対して最も完全で正確な運動学的軌跡を提供できます。
これらの他のソースとしては、データ取得プロジェクトの場所またはその近傍にあるローカルGNSS基地局や、通常は政府機関や商用CORSネットワークプロバイダーが提供する既存の常時稼働リファレンスステーション(CORS)などが挙げられます。
Post-Processing Kinematic(PPK)ソフトウェアは、無料で利用できるGNSS衛星の軌道およびクロック情報を使用して、精度をさらに向上させることができます。PPKを使用すると、使用される絶対的なグローバル座標参照フレームデータムにおけるローカルGNSS基地局の正確な位置を特定できます。
PPKソフトウェアは、エンジニアリングプロジェクトを支援するために、異なる座標参照系間の複雑な変換もサポートできます。
言い換えれば、補正を利用できるようにし、プロジェクトの精度を高め、ミッション後のサーベイまたは設置中のデータ損失やエラーを修復することもできます。
RTKとPPKの違いは何ですか?
リアルタイムキネマティック(RTK)は、GNSS補正がほぼリアルタイムで送信される測位技術であり、通常はRTCM形式の補正ストリームを使用します。ただし、GNSS補正、特にその完全性、可用性、カバレッジ、および互換性を確保する上で課題が生じる可能性があります。
RTKポスト処理に対するPPKの主な利点は、データ処理アクティビティをポスト処理中に最適化できることです。これには、順方向および逆方向処理が含まれます。一方、リアルタイム処理では、修正とその伝送における中断または非互換性により、位置決めの精度が低下します。
GNSS後処理(PPK)とリアルタイム(RTK)の最初の重要な利点は、フィールドで使用されるシステムが、CORSから送信されるRTCM補正をINS/GNSSシステムに供給するためのデータリンク/無線を必要としないことです。
ポスト処理の導入における主な制約は、最終的なアプリケーションが環境に対応する必要があることです。一方、最適化された軌道を作成するために必要な追加の処理時間に耐えられるアプリケーションであれば、すべての成果物のデータ品質が大幅に向上します。
順方向および逆方向処理はどのように機能しますか?
60秒間のGNSS停止が調査の途中で発生したとしましょう。順方向処理での位置誤差は急速に増大し(速度はIMUの仕様やその他のパラメーターによって異なります)、停止の最後に最大値に達します。その後、すぐに回復します。後処理では、時間が逆方向に流れると仮定し、物理方程式が有効なままであるため、反時間順で処理を行います。この逆方向処理では、誤差は自然な順方向処理と非常に対称的な方法で、GNSS停止の実際の開始時に最大になります。
これらの2つの計算結果をマージすると、停止の中央付近で誤差が最大になり、順方向のみまたは逆方向のみのソリューションよりもはるかに低い振幅になります。これにより、SBG Systems製品で許可されているGNSS+INSソリューションが特に改善されますが、GNSSのみの処理もこのワークフローの恩恵を受けることができます。
すでに述べたように、この改善はポスト処理によってのみ可能です。データの利用はサーベイ終了後まで遅延するため、最初から最後まで利用可能なすべてのデータが必要となるからです。
航空測量におけるジオレファレンスとは?
ジオレファレンスとは、地理データ(地図、衛星画像、航空写真など)を既知の座標系に整合させ、地球の表面に正確に配置できるようにするプロセスです。
これにより、データを他の空間情報と統合し、正確な位置情報に基づいた分析とマッピングが可能になります。
サーベイの分野では、ジオレファレンスは、ドローンのLiDAR、カメラ、またはセンサーなどのツールによって収集されたデータが、実際の座標に正確にマッピングされることを保証するために不可欠です。
各データポイントに緯度、経度、高度を割り当てることにより、ジオリファレンスは、取得されたデータが地球上の正確な位置と方向を反映するようにします。これは、地理空間マッピング、環境モニタリング、建設計画などのアプリケーションにとって非常に重要です。
通常、ジオリファレンスでは、GNSSまたは地上測量によって取得された既知の座標を持つコントロールポイントを使用して、キャプチャされたデータを座標系に合わせます。
このプロセスは、正確で信頼性が高く、利用可能な空間データセットを作成するために不可欠です。