
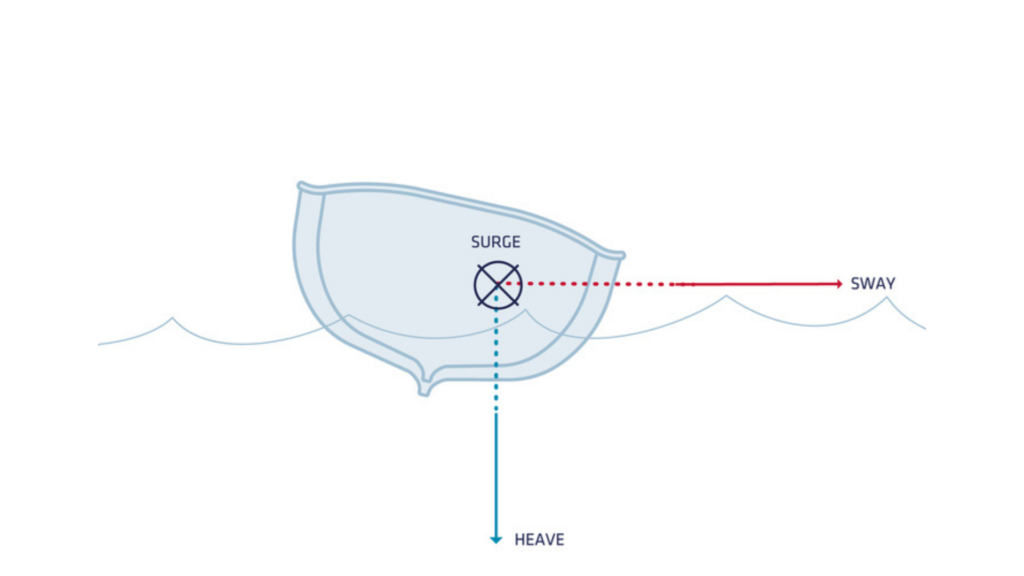
L'heave è una misurazione del movimento molto specifica per le applicazioni marine. Si riferisce al movimento verticale di un'imbarcazione dovuto all'azione delle onde, misurato come spostamento lineare lungo l'asse verticale locale, assumendo un valore medio di zero al centro di gravità dell'imbarcazione.
Sono stati applicati importanti aggiornamenti ai nostri algoritmi di heave in tempo reale e ritardato.
Per maggiori dettagli sul nostro algoritmo di heave e su come configurarlo correttamente, visitare la pagina della Knowledge Base del nostro Centro di Supporto.
Sviluppi recenti
I nostri attuali algoritmi di ondulazione in tempo reale e ritardata sono già leader del settore e hanno le migliori specifiche. Tuttavia, abbiamo apportato miglioramenti significativi per migliorare ulteriormente la loro precisione. Gli ultimi progressi, introdotti nella versione firmware 5.1, utilizzano la distanza tra il centro di rotazione (COR) e l'IMU (Inertial Measurement Unit), ottenendo i seguenti vantaggi per gli algoritmi di ondulazione in tempo reale e ritardata:
- Prestazioni migliorate:
- Precisione dell'heave in tempo reale migliorata da 5 cm a 4 cm.
- Accuratezza di beccheggio ritardato migliorata da 2,5 cm a 2 cm.
- Installazione flessibile dell IMU : l'IMU può ora essere installata in qualsiasi punto della nave, purché sia fornita la distanza dal COR. Si tratta di un miglioramento significativo rispetto alle versioni precedenti, che richiedevano che l'IMU fosse posizionata vicino al COR della nave, una sfida per le navi più grandi.
- Funzionamento migliorato in condizioni di mare difficili: le prestazioni complete sono mantenute anche in condizioni marine più impegnative.
Qualifica di nuovi algoritmi
La qualifica delle prestazioni di beccheggio è intrinsecamente impegnativa, soprattutto quando si punta a un'elevata precisione. Ecco come abbiamo affrontato questo problema:
Processo di valutazione
Abbiamo condotto diverse valutazioni, tra cui confronti di dataset batimetrici derivati da passaggi ripetuti sulla stessa area del fondale marino. Queste valutazioni sono state facilitate dal nostro cliente e partner, Norbit.
- Valutazioni batimetriche: confrontando diverse linee di rilevamento sulla stessa area, abbiamo stabilito un limite superiore delle prestazioni di ondulazione. Questo metodo tiene conto degli errori dell'intera catena di acquisizione, compresi quelli delle misure di posizione e angolari dell'INS , del sonar multibeam e di altre fonti.
- Verifica post-elaborazione: abbiamo anche testato il nostro nuovo algoritmo di ondeggiamento ritardato utilizzando Qinertia dati GNSS post-elaborati. I risultati hanno mostrato che il nuovo algoritmo ha prestazioni paragonabili a quelle dell'RTK.
Risultati e conclusioni
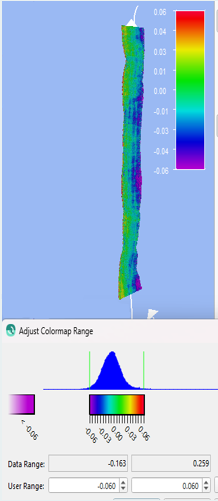
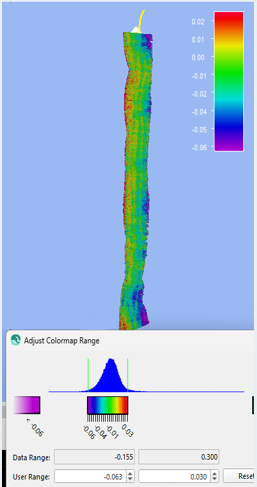
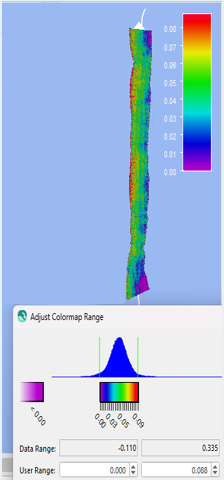
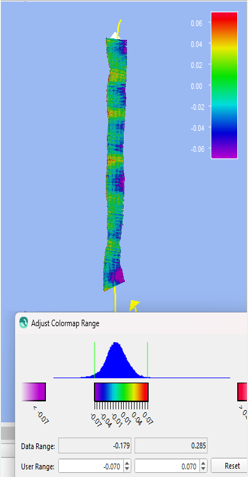
Le seguenti schermate forniscono un confronto affiancato tra le versioni dell'algoritmo precedente e quella nuova. Si noti che, sebbene le scale cromatiche differiscano, le statistiche fornite mostrano chiaramente un miglioramento. Vale la pena ricordare che, nonostante gli artefatti visivi nel vecchio algoritmo di heave, dovuti a condizioni del mare insolite e alla configurazione di grandi imbarcazioni, i valori sono rimasti entro le specifiche.
Confronto tra le versioni dell'algoritmo precedente e quella nuova

Queste valutazioni confermano il significativo miglioramento delle prestazioni dei nostri nuovi algoritmi di beccheggio, fornendo accuratezza e affidabilità superiori in varie condizioni.
Miglioramento delle misurazioni di beccheggio sia in tempo reale che differite
I miglioramenti delle prestazioni sono riassunti nella tabella seguente, che mostra un netto miglioramento sia nelle misurazioni dell'heave in tempo reale che in quelle ritardate.
| Vecchia stima del moto ondoso in tempo reale | Nuovo heave in tempo reale | Vecchia stima del moto ondoso ritardato | Nuovo heave ritardato | Riferimento PPK | |
|---|---|---|---|---|---|
| Media | 4 cm | 3 cm | 4 cm | 1 cm | 1 cm |
| Deviazione standard | 4 cm | 2 cm | 2 cm | 2 cm | 2 cm |
Questi miglioramenti assicurano che con la nostra linea di prodotti ad alte prestazioni:
- Le applicazioni di heave in tempo reale raggiungono una precisione di 4 cm.
- Le applicazioni di rilevamento, compatibili con l'heave ritardato e supportate dai principali pacchetti software di idrografia, raggiungono una precisione di 2 cm.
Inoltre, la funzione di altitudine potenziata dall'onda, disponibile sulle unità marine, beneficerà di questi miglioramenti. Tutti questi miglioramenti sono disponibili nel nostro software di post-elaborazione Qinertia 4 e nei nostri prodotti ad alte prestazioni a partire dalla versione 5.1 del firmware. Questi miglioramenti saranno presto estesi alla nostra gamma di prodottiEllipse .