
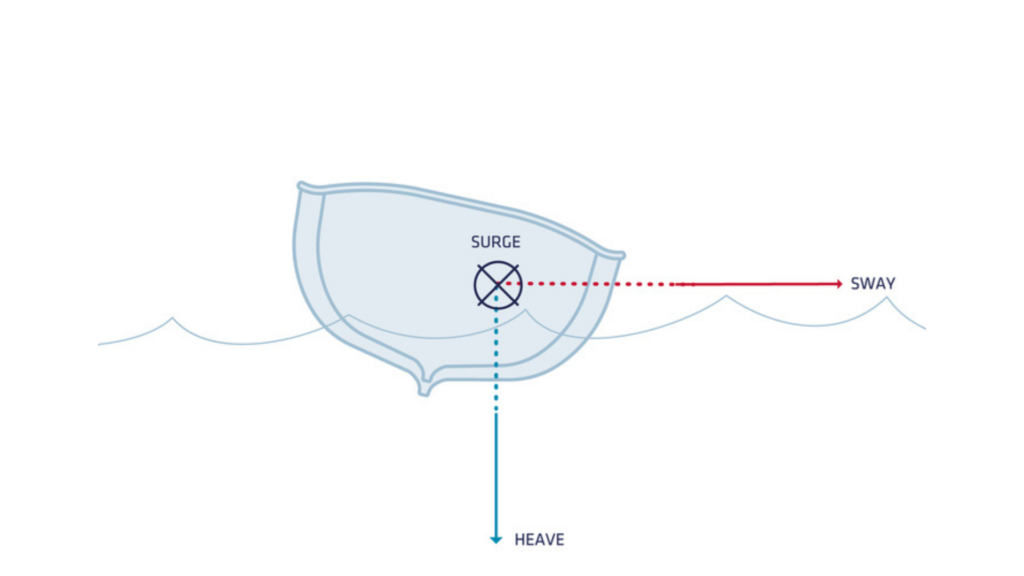
Le pilonnement est une mesure de mouvement très spécifique aux applications marines. Il fait référence au mouvement de haut en bas d'un navire dû à l'action des vagues, mesuré comme un déplacement linéaire le long de l'axe vertical local, en supposant une valeur moyenne de zéro au centre de gravité du navire.
Des mises à niveau majeures ont été appliquées à nos algorithmes de pilonnement en temps réel et différé.
Pour plus de détails sur notre algorithme de pilonnement et sur la manière de le configurer correctement, veuillez consulter la page de la base de connaissances de notre centre de support.
Développements récents
Nos algorithmes actuels de pilonnement en temps réel et différé sont déjà les meilleurs du marché et possèdent les meilleures spécifications. Cependant, nous avons apporté d'importantes améliorations pour améliorer encore leur précision. Les dernières avancées, introduites dans la version 5.1 du firmware, utilisent la distance entre le centre de rotation (COR) et l'IMU (Inertial Measurement Unit), ce qui se traduit par les avantages suivants pour les algorithmes de pilonnement en temps réel et différé :
- Performance améliorée :
- La précision du pilonnement en temps réel est améliorée, passant de 5 cm à 4 cm.
- Amélioration de la précision de la houle retardée, passant de 2,5 cm à 2 cm.
- Installation flexible de l'IMU : l'IMU peut désormais être installée n'importe où sur le navire, à condition que la distance par rapport au COR soit fournie. Il s'agit d'une amélioration significative par rapport aux versions précédentes, qui exigeaient que l'IMU soit située à proximité du COR du navire, ce qui représente un défi pour les grands navires.
- Amélioration du fonctionnement dans des états de mer difficiles : les performances maximales sont maintenues même dans des conditions maritimes plus exigeantes.
Qualification de nouveaux algorithmes
La qualification des performances de pilonnement est intrinsèquement difficile, surtout lorsque l'on vise une grande précision. Voici comment nous avons abordé ce problème :
Processus d'évaluation
Nous avons mené de multiples évaluations, y compris des comparaisons d'ensembles de données bathymétriques dérivés de passages répétés sur la même zone du fond marin. Ces évaluations ont été facilitées par notre client et partenaire, Norbit.
- Évaluations bathymétriques : en comparant plusieurs lignes de levé sur la même zone, nous avons établi une limite supérieure aux performances de pilonnement. Cette méthode tient compte de toutes les erreurs de la chaîne d'acquisition, y compris celles provenant de la position et des mesures angulaires de l'INS, du sonar multifaisceaux et d'autres sources.
- Vérification post-traitement : nous avons également testé notre nouvel algorithme de pilonnement différé en utilisant les données GNSS post-traitées Qinertia. Les résultats ont montré que le nouvel algorithme est comparable au RTK.
Résultats et conclusion
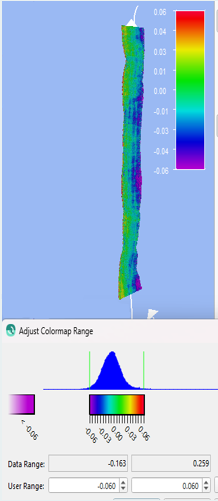
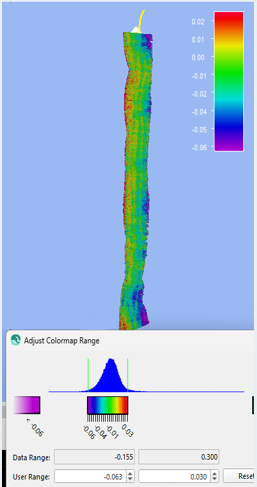
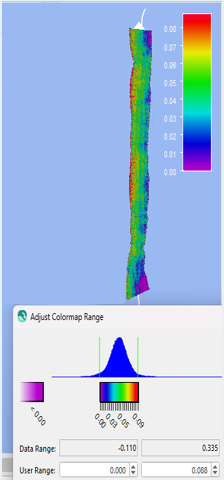
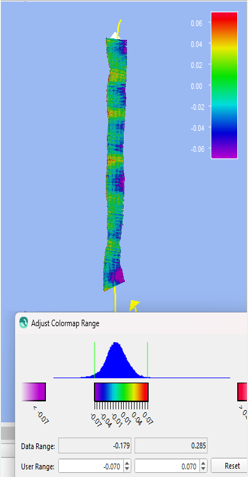
Les captures d'écran suivantes fournissent une comparaison côte à côte des anciennes et nouvelles versions de l'algorithme. Bien que les échelles de couleurs diffèrent, les statistiques fournies montrent clairement une amélioration. Il convient de mentionner que malgré les artefacts visuels dans l'ancien algorithme de pilonnement, qui étaient dus à des états de mer inhabituels et à une configuration de grand navire, les valeurs sont restées dans les spécifications.
Comparaison des anciennes et nouvelles versions de l'algorithme

Ces évaluations confirment l'amélioration significative des performances de nos nouveaux algorithmes de pilonnement, offrant une précision et une fiabilité supérieures dans diverses conditions.
Amélioration des mesures de pilonnement en temps réel et différé
Les améliorations de performance sont résumées dans le tableau ci-dessous, montrant une nette amélioration des mesures de pilonnement en temps réel et différé.
| Ancien pilonnement en temps réel | Nouvelle houle en temps réel | Ancien pilonnement différé | Nouvelle fonctionnalité de compensation de la houle différée | Référence PPK | |
|---|---|---|---|---|---|
| Moyenne | 4 cm | 3 cm | 4 cm | 1 cm | 1 cm |
| Écart type | 4 cm | 2 cm | 2 cm | 2 cm | 2 cm |
Ces améliorations garantissent qu'avec notre gamme de produits haute performance :
- Les applications de heave en temps réel atteignent une précision de 4 cm.
- Les applications de levés, compatibles avec le pilonnement différé et prises en charge par les principaux progiciels d'hydrographie, atteignent une précision de 2 cm.
De plus, la fonction d'altitude améliorée par le pilonnement disponible sur les unités marines bénéficiera de ces améliorations. Toutes ces améliorations sont disponibles dans notre logiciel de post-traitement Qinertia 4 et dans nos produits haute performance à partir de la version 5.1 du firmware. Ces améliorations seront bientôt étendues à notre gamme de produits Ellipse.