
En navegación, la actitud se refiere a la orientación de un vehículo u objeto con relación a un marco de referencia fijo, que normalmente se define mediante tres ejes de rotación: cabeceo (Pitch), alabeo (Roll) y guiñada (Yaw).
Estos ejes describen la posición angular y el movimiento del vehículo en el espacio tridimensional. El cabeceo se refiere a la inclinación hacia arriba o hacia abajo del morro del vehículo, el alabeo representa la inclinación lateral del vehículo a lo largo de su eje longitudinal y la guiñada denota la rotación hacia la izquierda o hacia la derecha alrededor de su eje vertical. En conjunto, estos parámetros definen cómo se posiciona y maniobra un vehículo en su entorno.
La actitud es crucial para mantener la estabilidad, garantizar un control preciso y permitir una navegación exacta en diversos ámbitos. En la aviación, por ejemplo, la actitud ayuda a los pilotos o a los sistemas de piloto automático a mantener un vuelo nivelado, ejecutar giros y ajustarse a las turbulencias.
Del mismo modo, en la navegación marítima, el control de la actitud garantiza que una embarcación se mantenga erguida y en el rumbo correcto a pesar de los retos que plantean las olas y las corrientes.
En las naves espaciales, la actitud desempeña un papel fundamental a la hora de apuntar antenas, paneles solares o instrumentos científicos en la dirección correcta, especialmente cuando no se dispone de referencias visuales externas.
Para medir y controlar la actitud, se emplean sistemas como los giróscopos, los acelerómetros y los magnetómetros, a menudo integrados en un Sistema de Navegación Inercial (INS). Estos sistemas funcionan conjuntamente con fuentes de datos externas, como el GNSS o los rastreadores de estrellas, para mantener una orientación precisa.
La comprensión y la gestión de la actitud son especialmente importantes en entornos dinámicos, donde las fuerzas externas como el viento, las olas o las anomalías gravitacionales pueden afectar a la trayectoria de un vehículo.
Por lo tanto, un control eficaz de la actitud garantiza un desplazamiento seguro y eficiente, lo que permite a los vehículos cumplir sus objetivos de navegación con precisión.
Soluciones de actitud GNSS
Las soluciones de actitud GNSS proporcionan los ángulos de alabeo, cabeceo y guiñada, que describen la orientación de un objeto en el espacio. Estos tres componentes son esenciales para comprender la actitud del objeto en relación con la superficie de la Tierra o un marco de referencia.
- El alabeo se refiere a la rotación alrededor del eje delantero, que afecta a la inclinación izquierda y derecha del objeto.
- El cabeceo (Pitch) es la rotación alrededor del eje lateral, que determina la inclinación hacia arriba y hacia abajo.
- La guiñada es la rotación alrededor del eje vertical, que define la dirección hacia la que mira el objeto.
Estas soluciones combinan datos de receptores GNSS con sensores adicionales, como acelerómetros y giroscopios, para ofrecer información de actitud altamente precisa y fiable.
Este enfoque es particularmente valioso en entornos donde la orientación precisa es crucial, como en los sistemas de navegación para aeronaves, embarcaciones y vehículos autónomos. Al integrar estas diversas entradas de sensores, el sistema garantiza un rendimiento óptimo incluso en condiciones difíciles.
Representaciones de la actitud
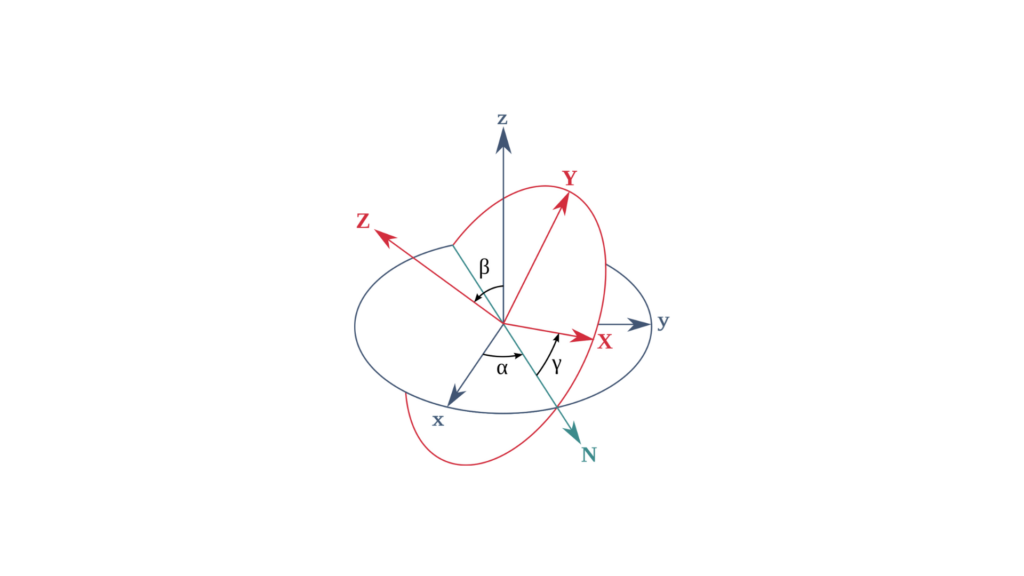
La actitud representa la orientación o rotación de un objeto en relación con un marco de referencia, como la superficie de la Tierra. En los sistemas de navegación, este concepto es fundamental para determinar la orientación del objeto en el espacio, lo que podría aplicarse a aeronaves, UAV, buques u otros sistemas autónomos. Existen varias formas de representar la actitud matemática y visualmente.
1 – Ángulos de Euler (Roll, Pitch, Yaw)
Los ángulos de Euler representan la orientación de un objeto mediante tres rotaciones: alabeo (roll), cabeceo (pitch) y guiñada (yaw). Estos ángulos describen las rotaciones alrededor de tres ejes en una secuencia específica, como:
Alabeo (φ): Rotación alrededor del eje delantero-trasero.
Cabeceo (θ): Rotación alrededor del eje de lado a lado.
Guiñada (ψ): Rotación alrededor del eje vertical.
Representación matemática
Los ángulos de Euler pueden representarse como una matriz de rotación de 3×3, donde:
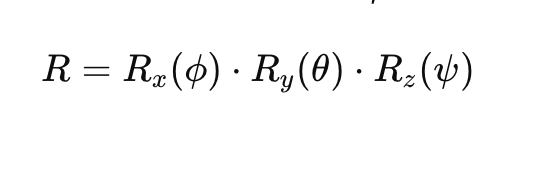
Aquí:
- Rx(ϕ)R_x(\phi)Rx(ϕ) es la matriz de rotación para el alabeo.
- Ry(θ)R_y(\theta)Ry(θ) es la matriz de rotación para el cabeceo.
- Rz(ψ)R_z(\psi)Rz(ψ) es la matriz de rotación para la guiñada.
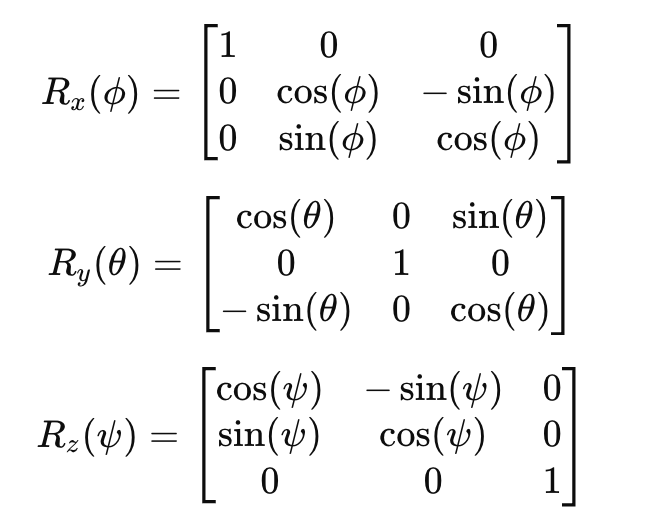
Cada matriz de rotación se da como:
2 – Matrices de rotación
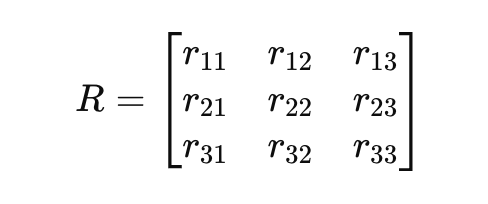
Las matrices de rotación ofrecen una forma alternativa de representar la actitud. En este método, una matriz de 3×3 describe la orientación de un objeto en el espacio 3D en relación con un sistema de coordenadas fijo. Estas matrices son ortogonales, lo que significa que las filas y las columnas son vectores unitarios. En consecuencia, la inversa de la matriz es simplemente su transpuesta.
Representación matemática
Puede escribir una matriz de rotación general 𝑅 como:
3 – Quaternions
Los cuaterniones proporcionan una representación más compacta y numéricamente estable de la rotación. Evitan las singularidades y los problemas de bloqueo del cardán asociados con los ángulos de Euler. Un cuaternión 𝑞 es un vector de 4 dimensiones:
Donde 𝑞0 es la parte escalar, y [𝑞1, 𝑞2, 𝑞3] son los componentes vectoriales. La representación de cuaternión de una rotación se puede escribir como:

Aquí:
- θ es el ángulo de rotación.
- [vx,vy,vz] es el vector unitario que representa el eje de rotación.
- i, j, k son las unidades fundamentales de los cuaterniones.
Ventajas de los Quaternions:
- Evita el bloqueo del cardán y las singularidades.
- Más eficiente computacionalmente para la interpolación.
4 – Matrices de cosenos directores (DCM)
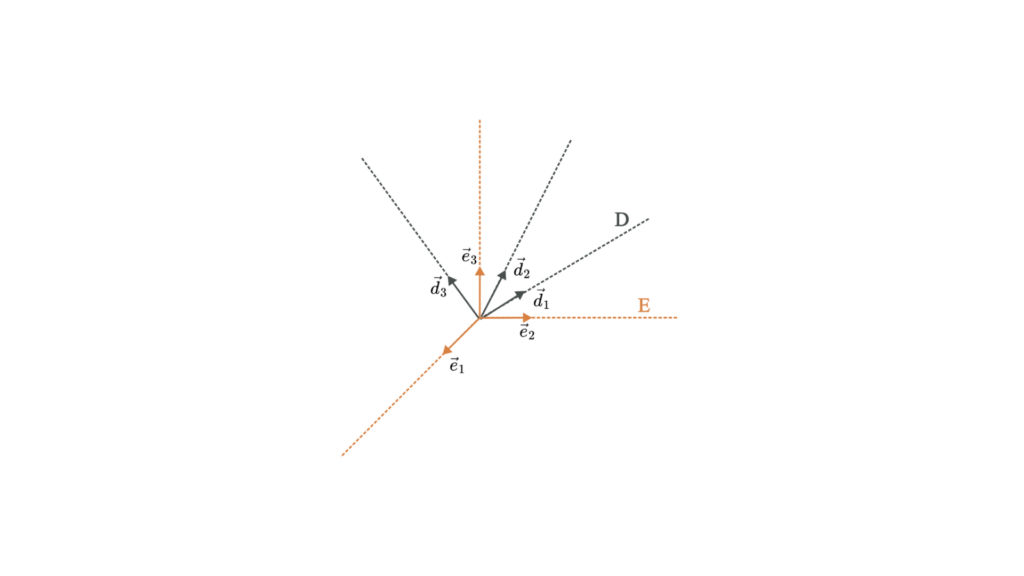
Una matriz de cosenos directores es similar a una matriz de rotación y también describe la orientación de un objeto. La DCM relaciona las coordenadas de un vector en un sistema con las coordenadas del mismo vector en otro sistema.
Representación matemática
Una matriz de cosenos directores 𝐶 es una matriz de 3×3 que define la relación entre dos sistemas de coordenadas:
Donde los elementos cos (⋅) representan el coseno del ángulo entre los vectores de los dos sistemas de coordenadas.
Cuéntenos su proyecto