




OEM Pulse-80 Best in class OEM IMU, delivering optimal performance
We are pleased to introduce the OEM version of the Pulse-80 IMU, a tactical-grade Inertial Measurement Unit that combines low-noise gyroscopes and accelerometers to deliver optimal performance in applications where precision and robustness are paramount.
It was designed with a redundant sensor design that enhances data reliability through continuous built-in-test (CBIT), making it the perfect choice for mission-critical applications. Don’t compromise on size, performance, or reliability.
Available this summer!
OEM Pulse-80 features
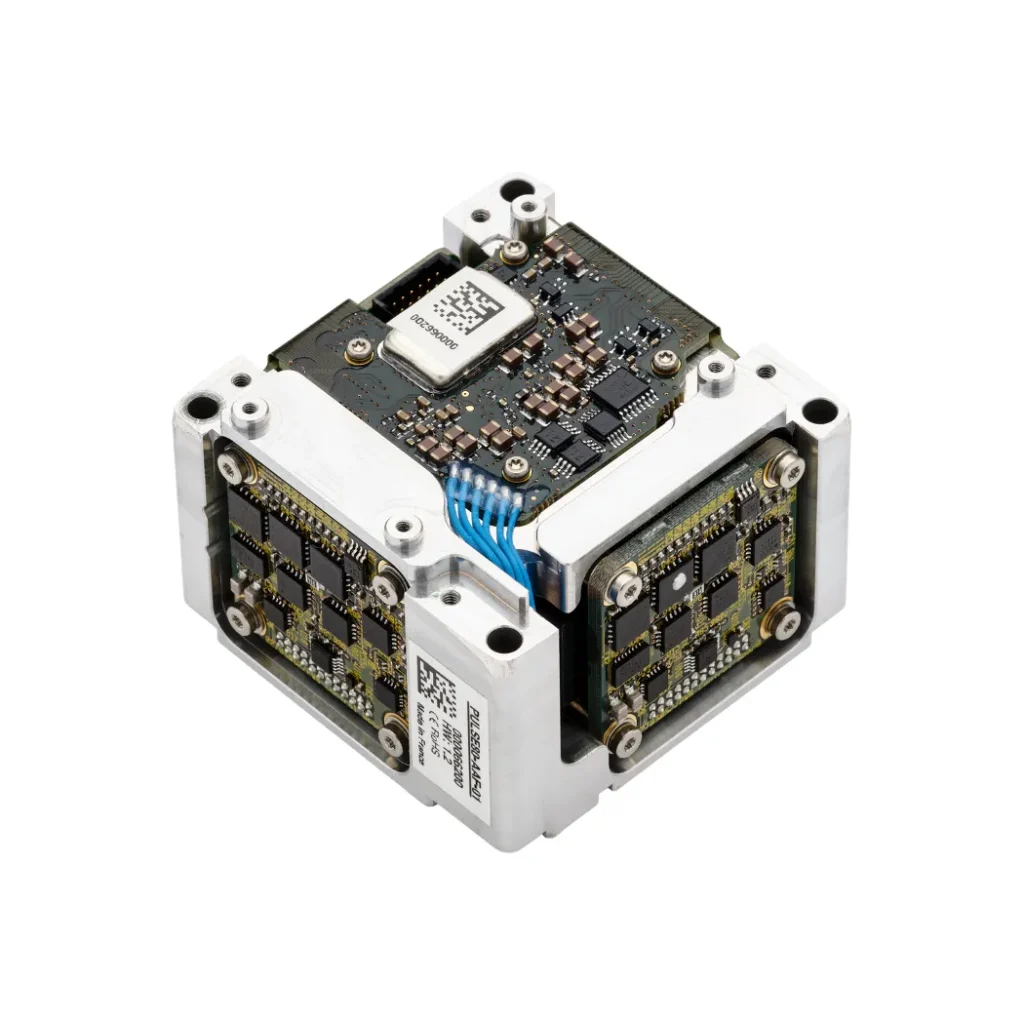
Our Pulse-80 OEM is a high-performance, tactical-grade inertial measurement unit (IMU) designed for demanding applications that require unmatched reliability in harsh environments without compromising on SWaP-C. With its redundant integration of MEMS accelerometers and gyroscopes, the Pulse-80 OEM version, delivers low sensor noise, exceptional bias stability and a high data rate, making it ideal for stabilisation and navigation tasks. It packs a unique set of capabilities into one of the smallest OEM IMUs available.
This IMU is tailored for vibrating environments, thanks to an ultra low Vibration Rectification Error (VRE) and a robust aluminum enclosure.




Specifications
Accelerometer performance
± 15 / ± 40 g * Long term bias repeatability
<1 mg ** Bias in-run instability
6 μg *** Scale factor
300 ppm ** Velocity random walk
0.02 m/s/√h *** Vibration rectification coefficient
0.03 mg/g² Bandwidth
100 Hz
Gyroscope performance
± 400 °/s Long term bias repeatability
20 °/h * Bias in-run instability
0.1 °/h ** Scale factor
150 ppm * Angular Random Walk
0.012 °/√h ** Vibration rectification coefficient
0.08 °/h/g² rms Bandwidth
100 Hz
Interfaces
Binary sbgECom Output rate
Up to 2 kHz Inputs / Outputs
1x UART (LvTTL) out + 1x UART (LvTTL) in – up to 4 Mbps CAN
1x CAN 2.0 A/B, up to 1 Mbps Sync IN/OUT
1 x Sync in/out (Event in, Sync out, Clock in) Clock Modes
Internal or external (direct at 2kHz or scaled) IMU configuration
sbgINSRestAPI (clock mode, ODR, sync in/out, events)
Mechanical & electrical specifications
5 to 36 VDC Power consumption
<1.3 W EMC
EN 55032:2015, EN 61000-4-3, EN 61000-6-1, EN 55024 Weight (g)
150 g Dimensions (LxWxH)
52 x 52 x 36 mm
Environmental specifications & operating range
None (OEM) Operating Temperature
-40 °C to 71 °C Vibrations
10 g RMS | 20 Hz to 2 kHz Shocks
< 2000 g MTBF (computed)
50 000 hours Compliant with
No

Applications
We designed the OEM version of the Pulse-80, as a high-performance inertial measurement unit (IMU) designed to meet the demanding needs of various applications across multiple industries.
It ensures accurate and reliable motion sensing, making it ideal for applications in robotics, aerospace, automotive, and marine environments.
Our IMU excels in providing precise orientation and positioning data, enabling seamless integration into systems that require high levels of stability and responsiveness.
Start now experiencing Pulse-80’s precision and versatility and discover its applications.
Pulse-80 OEM datasheet
Get all the sensor features and specifications delivered straight to your inbox!
Compare Pulse-80 OEM version with other products
Explore how this OEM version stacks up against other products with our comprehensive comparison table.
Discover the unique advantages it offers in performance, precision, and compact design, making it a standout choice for your orientation and navigation needs.
OEM Pulse-80 |
|||
|---|---|---|---|
| Accelerometer Range | Accelerometer Range ± 15 / ± 40 g | Accelerometer Range ± 40 g | Accelerometer Range ±40 g |
| Gyroscope Range | Gyroscope Range ± 400 °/s | Gyroscope Range ± 1000 °/s | Gyroscope Range ± 2000 °/s |
| Accelerometer Bias in-run instability | Accelerometer Bias in-run instability 6 μg | Accelerometer Bias in-run instability 14 μg | Accelerometer Bias in-run instability 6 μg |
| Gyroscope Bias in-run instability | Gyroscope Bias in-run instability 0.1 °/h | Gyroscope Bias in-run instability 7 °/h | Gyroscope Bias in-run instability 0.8 °/h |
| Velocity Random Walk | Velocity Random Walk 0.02 m/s/√h | Velocity Random Walk 0.03 m/s/√h | Velocity Random Walk 0.02 m/s/√h |
| Angular Random Walk | Angular Random Walk 0.012 °/√h | Angular Random Walk 0.018 °/√h | Angular Random Walk 0.08 °/√h |
| Accelerometer Bandwidth | Accelerometer Bandwidth 100 Hz | Accelerometer Bandwidth 390 Hz | Accelerometer Bandwidth 480 Hz |
| Gyroscope Bandwidth | Gyroscope Bandwidth 100 Hz | Gyroscope Bandwidth 133 Hz | Gyroscope Bandwidth 480 Hz |
| Output rate | Output rate Up to 2 kHz | Output rate Up to 1kHz | Output rate Up to 2kHz |
| Operating voltage | Operating voltage 5 to 36 VDC | Operating voltage 4 to 15 VDC | Operating voltage 3.3 to 5.5 VDC |
| Power consumption | Power consumption < 1.3 W | Power consumption 0.40 W | Power consumption 0.30 W |
| Weight (g) | Weight (g) 150 g | Weight (g) 10 g | Weight (g) 12 g |
| Dimensions (LxWxH) | Dimensions (LxWxH) 52 x 52 x 36 mm | Dimensions (LxWxH) 26.8 x 18.8 x 9.5 mm | Dimensions (LxWxH) 30 x 28 x 13.3 mm |

Compatibility
Pulse-80 OEM documentation & resources
Our OEM Pulse-80 comes with comprehensive documentation, designed to support users at every step.
From installation guides to advanced configuration and troubleshooting, our clear and detailed manuals ensure smooth integration and operation.
Production process
Discover the precision and expertise that define every SBG Systems product. In this video, you’ll get an inside look at how we meticulously design, manufacture, and test our high-performance inertial systems. First, our engineering team develops advanced designs tailored for mission-critical applications. Then, we move into production, where we apply rigorous quality control at every stage. As a result, each product delivers outstanding reliability and accuracy—even in the harshest conditions.
Watch now to learn more!

Ask for details about OEM Pulse-80
They talk about us
We showcase the experiences and testimonials from industry professionals and clients who have leveraged our products in their projects.
Discover how our innovative technology has transformed their operations, enhanced productivity, and delivered reliable results across various applications.
FAQ section
Welcome to our FAQ section, where we address your most pressing questions about our cutting-edge technology and its applications.
Here, you’ll find comprehensive answers regarding product features, installation processes, troubleshooting tips, and best practices to maximize your experience with our IMU.
Find your answers Here!
What is the difference between IMU and INS?
The difference between an Inertial Measurement Unit (IMU) and an Inertial Navigation System (INS) lies in their functionality and complexity.
An IMU (inertial measuring unit) provides raw data on the vehicle’s linear acceleration and angular velocity, measured by accelerometers and gyroscopes. It supplies information on roll, pitch, yaw, and motion, but does not compute position or navigation data. The IMU is specifically designed to relay essential data about movement and orientation for external processing to determine position or velocity.
On the other hand, an INS (inertial navigation system) combines IMU data with advanced algorithms to calculate a vehicle’s position, velocity, and orientation over time. It incorporates navigation algorithms like Kalman filtering for sensor fusion and integration. An INS supplies real-time navigation data, including position, velocity, and orientation, without relying on external positioning systems like GNSS.
This navigation system is typically utilized in applications that require comprehensive navigation solutions, particularly in GNSS-denied environments, such as military UAVs, ships, and submarines.
What is an Inertial Measurement Unit?
Inertial Measurement Units (IMUs) are sophisticated devices that measure and report a body’s specific force, angular velocity, and sometimes magnetic field orientation. IMUs are crucial components in various applications, including navigation, robotics, and motion tracking. Here’s a closer look at their key features and functions:
- Accelerometers: Measure linear acceleration along one or more axes. They provide data about how quickly an object is speeding up or slowing down and can detect changes in motion or position.
- Gyroscopes: Measure angular velocity, or the rate of rotation around a specific axis. Gyroscopes help determine orientation changes, enabling devices to maintain their position relative to a reference frame.
- Magnetometers (optional): Some IMUs include magnetometers, which measure the strength and direction of magnetic fields. This data can help determine the device’s orientation relative to the Earth’s magnetic field, enhancing navigational accuracy.
IMUs provide continuous data on an object’s motion, allowing for real-time tracking of its position and orientation. This information is critical for applications like drones, vehicles, and robotics.
In applications such as camera gimbals or UAVs, IMUs help stabilize movements by compensating for unwanted motions or vibrations, resulting in smoother operations.