
El sistema de coordenadas del sensor o sistema de referencia del cuerpo es un sistema de referencia local que se mueve con un sensor o plataforma, como un dron, un vehículo, un robot o un misil. Define la orientación y el movimiento en relación con la estructura física del sensor. Los ingenieros utilizan el sistema de referencia del cuerpo para expresar mediciones como la aceleración, la velocidad angular y la velocidad directamente desde la perspectiva del sensor.
El sistema de coordenadas del sensor (cuerpo), a menudo denominado marco del cuerpo o marco del vehículo, sirve como marco de referencia fijado a una plataforma móvil, como un dron, un coche, un misil o un vehículo submarino. Los ingenieros utilizan este marco para describir el movimiento y la orientación de la plataforma en relación consigo misma, lo que lo hace esencial para la navegación, el control y la fusión de sensores.
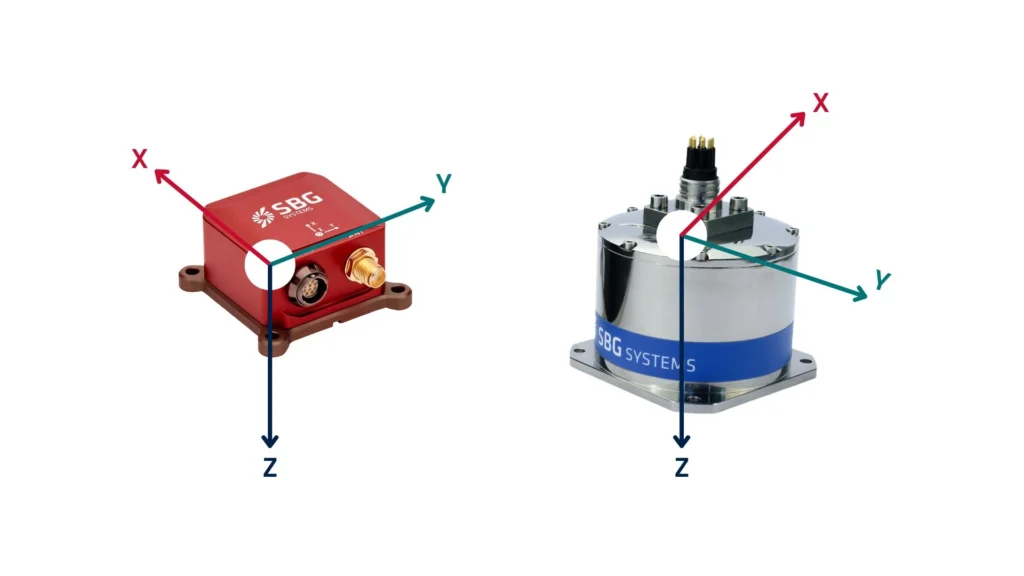
En la mayoría de las aplicaciones, los usuarios montan sensores como IMU, receptores GNSS o unidades AHRS directamente en el vehículo. Estos sensores reportan datos en su propio marco de coordenadas, que normalmente coincide con el marco del cuerpo. Consta de tres ejes ortogonales que forman un sistema de coordenadas a la derecha:
- El eje X apunta hacia delante, en la dirección del movimiento o el morro del sensor.
- El eje Y apunta a la derecha (estribor para los sistemas marinos o aeronáuticos).
- El eje Z apunta hacia abajo o hacia abajo en relación con la base del sensor, dependiendo de la aplicación.
Esta orientación fija permite al sistema medir cómo se mueve o gira en su propio espacio, en lugar de en relación con la Tierra.
Ejemplos de aplicaciones de armazón de carrocería
La IMU de un dron es responsable de medir la aceleración y la rotación en su propio marco de referencia. Cuando el dron se inclina hacia delante, detecta la velocidad angular alrededor de su eje Y. El sistema transmite estos datos al controlador de vuelo, lo que permite al dron estabilizarse y ejecutar comandos de vuelo con precisión. Por ejemplo, el sistema de piloto automático del dron utiliza los datos de los sensores en el marco del cuerpo para estabilizar el vuelo y ejecutar maniobras como la guiñada, el cabeceo y el alabeo. El sistema interpreta los movimientos directamente, expresándolos como movimientos hacia delante, laterales y verticales en relación con el propio marco del dron.
Un coche autónomo, por otro lado, detecta su aceleración lineal a lo largo de los ejes X (hacia delante), Y (lateral) y Z (vertical) en su marco del cuerpo. Esta capacidad permite al vehículo ajustar su velocidad, mantener el control del carril y responder a los cambios en el terreno. Este marco de coordenadas facilita la interpretación de los datos del lidar, el radar y los datos inerciales. El sistema de control del coche utiliza estas lecturas para tomar decisiones de conducción en tiempo real basadas en su propia orientación.
El sistema de navegación de un misil utiliza el marco del cuerpo para el seguimiento de la orientación. A medida que maniobra, el sensor de a bordo detecta las velocidades de rotación y la aceleración en los ejes fijos al cuerpo, lo que permite realizar correcciones precisas del rumbo. El sistema de navegación de a bordo del misil utiliza el marco del cuerpo para rastrear la aceleración y la velocidad angular, lo que le permite ajustar su trayectoria y orientación en función de su posición actual y la orientación del marco de coordenadas.
Un brazo robótico emplea un marco del cuerpo para calcular los movimientos de las articulaciones y las posiciones del efector final. La posición y la orientación de cada motor se miden en este marco local para garantizar el control en tiempo real.
Retos de la alineación de sensores
En aplicaciones prácticas, los sensores no siempre están perfectamente alineados con el marco del cuerpo. Para solucionar este problema, los ingenieros suelen implementar correcciones de rotación de marco, que alinean el sistema de coordenadas del sensor con el marco del cuerpo del vehículo. Esto garantiza lecturas precisas para los cálculos relacionados con la posición, la velocidad y la orientación. Es fundamental para cualquier sistema que se mueva y detecte su entorno. Desempeña un papel vital en la navegación, el control y la estabilización en tiempo real, lo que lo hace esencial en los sistemas aeroespaciales, de defensa, automotrices y robóticos.
Cuéntenos su proyecto