Ingeniería de vehículos autónomos: la navegación de Zurich UAS Racing con Ellipse-D
Zurich UAS Racing ha resuelto los problemas críticos de deriva de posición que antes hacían imposible el funcionamiento sin conductor. Este avance en la ingeniería de vehículos autónomos permite ahora al equipo comenzar su camino hacia la disciplina de autocross en la famosa competición Formula Student.
El Ellipse-D nos permite obtener una posición absoluta de nuestro coche en la pista. Una posición precisa es esencial para el funcionamiento de nuestro sistema sin conductor. Uno de nuestros mayores problemas ha sido la deriva de la posición con el tiempo. Con el Ellipse-D, podremos abordar la disciplina de autocross, que antes era imposible para nosotros. | Finn Scheller, C-Leader del Zurich UAS Racing Team.

Los antecedentes del equipo en la ingeniería de vehículos autónomos
Zurich UAS Racing (ZUR) es un apasionado equipo de Formula Student de la Universidad de Ciencias Aplicadas de Zúrich en Winterthur, Suiza. Fundada en 2019, esta ambiciosa asociación de estudiantes compite en la competición de ingeniería más grande del mundo, Formula Student, construyendo coches eléctricos y autónomos para competir contra universidades de todo el mundo.

El equipo ha crecido hasta superar los 70 estudiantes motivados de diversos programas de grado, todos unidos por su objetivo de optimizar el rendimiento en las carreras y avanzar en la ingeniería de vehículos autónomos.
Formula Student
La competición Formula Student, de gran prestigio internacional, desafía a los equipos de estudiantes a diseñar y construir coches de carreras de fórmula, compitiendo en varias disciplinas, incluyendo el diseño de ingeniería, el análisis de costes y los eventos dinámicos en pista.

El coche: ZUR04
El viaje de ZUR comenzó con su primer coche funcional en 2021, participando con éxito en eventos de vehículos eléctricos (EV) desde 2022. Su coche de carreras sin conductor, el ZUR04, representa la vanguardia de la ingeniería de vehículos autónomos para estudiantes, con cuatro motores eléctricos en el buje de las ruedas que producen 140 kW de potencia total, lo que permite una aceleración de 0 a 100 km/h en solo 2,5 segundos.
El vehículo está diseñado tanto para la conducción humana como para las carreras autónomas, con un rendimiento comparable al de los coches de carreras profesionales. Su sistema sin conductor se encuentra actualmente en fase de pruebas.
Requisitos técnicos de Zurich UAS Racing
ZUR necesitaba un Sistema de Navegación Inercial (INS) avanzado que pudiera integrarse perfectamente con su sistema de carreras autónomo, cumpliendo al mismo tiempo los exigentes requisitos de la competición de alta velocidad.
Su principal reto era lograr un posicionamiento fiable en el entorno dinámico de las carreras, donde los sistemas de localización tradicionales suelen fallar debido a la deriva de la posición con el tiempo.
El sistema tenía que proporcionar una precisión de posición absoluta esencial para el funcionamiento de su sistema sin conductor, especialmente para la desafiante disciplina de autocross que requiere una navegación precisa a través de complejas disposiciones de conos.
Así que, en resumen, estos eran los problemas críticos:
- Deriva de posición: deriva significativa con el tiempo que impide una localización precisa.
- Limitación de autocross: no se puede competir en la disciplina de autocross debido a problemas de posicionamiento.
- Información limitada de los datos: datos insuficientes de la dinámica del vehículo para la optimización del software.

Y estos fueron los requisitos básicos:
- Localización precisa: Necesidad de una posición absoluta en la pista.
- Integración ROS: Integración perfecta con el sistema autónomo basado en ROS existente.
- Solución compacta: Unidad ligera con buena relación potencia-peso.
- Documentación abierta: Recursos técnicos de fácil acceso.
- Alta dinámica: Capacidad para manejar condiciones de carrera extremas.
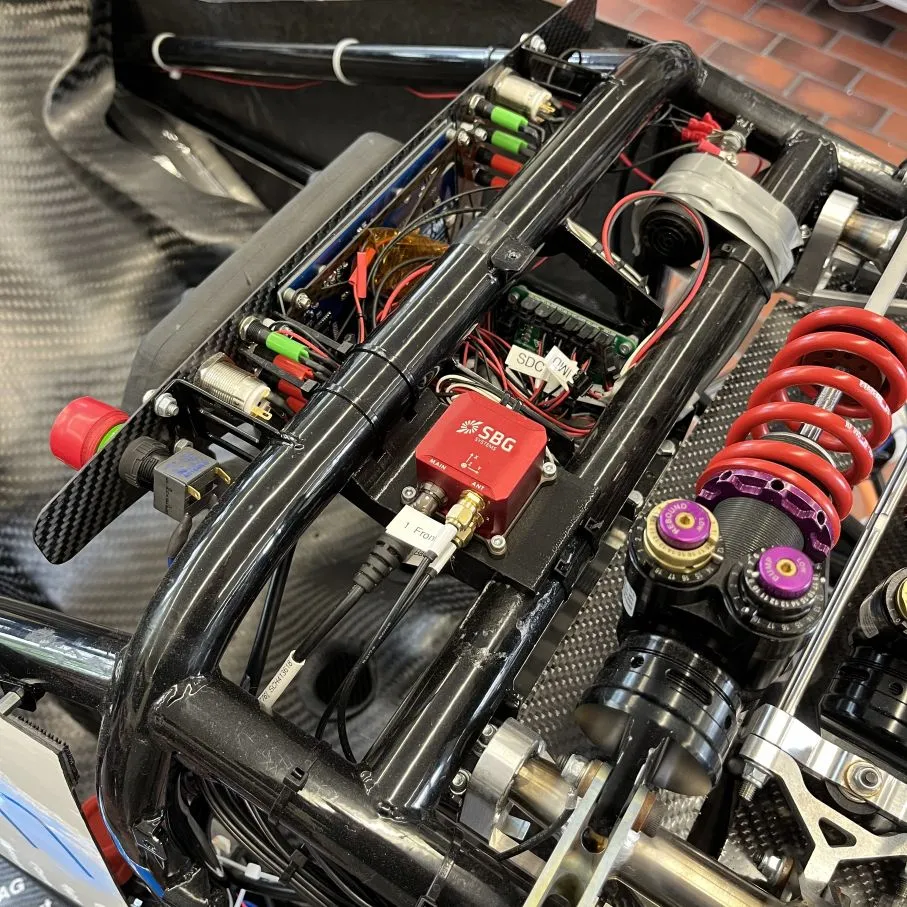
Tras evaluar el escenario de ZUR, recomendamos nuestro Ellipse-D, un sistema de navegación inercial (INS) diseñado específicamente para aplicaciones exigentes donde la precisión y la fiabilidad son primordiales.
Nuestra solución para carreras autónomas: Ellipse-D
El Ellipse-D es el sistema GNSS/INS RTK de doble antena más pequeño, que proporciona un posicionamiento a nivel de centímetros y un rumbo preciso para aplicaciones de carreras dinámicas.
Esta tecnología representa un avance significativo en las soluciones de ingeniería de vehículos autónomos, ofreciendo al equipo:
- Alta precisión: Precisión de posicionamiento a nivel centimétrico, esencial para la navegación precisa en la pista y la evitación de obstáculos en carreras autónomas.
- Rum Heading con doble antena: Rendimiento superior en entornos difíciles donde la interferencia magnética de los motores eléctricos y los sistemas electrónicos comprometería los sistemas tradicionales basados en brújulas.
- Cumplimiento de las normas de las carreras: Diseño compacto y construcción robusta, ideal para aplicaciones de carreras de alta dinámica, con una excepcional resistencia a las vibraciones y a la temperatura.

Finalmente, el cuarto punto esencial para la aspiración de ZUR era la integración ROS que, en sus propias palabras, combinada con las otras características, hizo de todo el paquete la solución más rentable disponible en el mercado:
“El principal punto de venta para nosotros fue la documentación de código abierto y la biblioteca de interfaces. El soporte completo a través de ROS es también una gran ventaja para nosotros, ya que nuestro coche ya funciona con ROS. Así que la integración fue fácil. También apreciamos el apoyo de SBG Systems a nuestro equipo para mejorar nuestro rendimiento gracias a sus productos. En comparación con otros proveedores de este tipo de productos, SBG Systems nos ofreció la mejor relación calidad-precio”, subraya Scheller.
Integración y rendimiento avanzados
El proceso de integración demostró la versatilidad del Ellipse-D y la eficacia del enfoque de soporte de SBG Systems. Conectado tanto a una plataforma informática RaspberryPi como a NVIDIA Jetson, el sistema utiliza tanto la biblioteca sbgECom como el paquete ROS2 para un acceso y procesamiento completos de los datos.
Esta arquitectura permite la distribución de datos de navegación en tiempo real a través del sistema autónomo, manteniendo al mismo tiempo la flexibilidad necesaria para el desarrollo de algoritmos personalizados.
El equipo también está aprovechando las capacidades del Ellipse-D para desarrollar algoritmos avanzados de vectorización del par que utilizan los datos del INS. También han construido un rover basado en GNSS RTK y una estación base para proporcionar una referencia terrestre precisa de la pista.
Además de integrar el INS en su coche sin conductor ZUR04, con pruebas en pista programadas para este verano, el equipo ha incorporado el INS en su coche de carreras de nueva construcción, el ZUR05. El Ellipse-D también será un componente clave en el vehículo sin conductor de la próxima temporada, el ZUR06.
Las tres mejores opciones de Zurich UAS Racing
ZUR destacó tres aspectos sobresalientes que les encantan de trabajar con SBG Systems.
- Código abierto: En primer lugar, apreciaron el enfoque de código abierto que se alinea con su misión educativa y metodología de desarrollo. La documentación transparente y las bibliotecas de interfaz permiten a los estudiantes comprender y modificar el sistema de acuerdo con sus necesidades específicas, proporcionando oportunidades de aprendizaje inestimables en la ingeniería de vehículos autónomos.
- Excelente documentación: El equipo valoró la documentación completa y de libre acceso del producto, que agilizó su proceso de integración. A diferencia de muchos sistemas comerciales que proporcionan detalles técnicos limitados, el enfoque de SBG Systems permitió una rápida comprensión e implementación.
- Buena comunicación: Por último, destacaron la excelente comunicación y el soporte, señalando que siempre se sintieron escuchados y recibieron respuestas a todas sus preguntas. Este soporte receptivo demostró ser crucial para un equipo de estudiantes que trabajaba con plazos de competencia ajustados.
Conclusión
La implementación abordó el reto más crítico de ZUR: la deriva de la posición que antes les había impedido competir en la disciplina de autocross. Con la precisión centimétrica del Ellipse-D y la determinación del rumbo mediante doble antena, el equipo puede ahora iniciar las pruebas con el objetivo de competir sin conductor en la próxima temporada (verano de 2026) con su coche de carreras de nueva generación.

Esta colaboración ejemplifica el poder de las asociaciones entre la industria y la educación para avanzar en la tecnología de vehículos autónomos.
“Ellipse es el punto de partida perfecto para los sistemas INS. En el futuro, planeamos utilizar sistemas más potentes junto con nuestro sistema de vehículos basado en Ethernet de nuevo desarrollo”, concluye Scheller.
Nuestro compromiso de apoyar a equipos de estudiantes como ZUR demuestra cómo el acceso a la tecnología de navegación de calidad profesional permite a la próxima generación de ingenieros superar los límites de lo que es posible en las carreras autónomas.
Ellipse-D
El Ellipse-D es un sistema de navegación inercial compacto y de alto rendimiento asistido por GNSS que proporciona mediciones fiables de orientación, posición y compensación de oleaje (heave).
Combina una IMU con un receptor GNSS de doble banda y utiliza algoritmos de fusión de sensores para ofrecer un posicionamiento preciso en entornos difíciles.
Ofrece capacidad de doble antena para una orientación precisa en condiciones estáticas.

Solicite un presupuesto para Ellipse-D
¿Tiene alguna pregunta?
¡Bienvenido a nuestra sección de preguntas frecuentes! Aquí encontrará respuestas a las preguntas más comunes sobre las aplicaciones que mostramos. Si no encuentra lo que busca, ¡no dude en ponerse en contacto con nosotros directamente!
¿Cómo funcionan los coches autónomos?
Los coches autónomos son vehículos equipados con sistemas sofisticados que les permiten navegar y controlarse sin intervención humana. Estos vehículos utilizan una combinación de sensores de conducción autónoma y algoritmos para percibir su entorno, tomar decisiones y realizar tareas de conducción autónoma. El objetivo es lograr una autonomía total, en la que el vehículo pueda gestionar todos los aspectos de la conducción de forma segura y eficiente.
Los coches autónomos dependen de una serie de tecnologías clave para percibir su entorno. Estas incluyen:
- GNSS (Sistema Global de Navegación por Satélite): para obtener las actualizaciones en tiempo real de la posición, velocidad y dirección del coche autónomo.
- INS (Sistemas de Navegación Inercial): para mantener la precisión en caso de interrupciones de la señal GNSS. Proporciona actualizaciones en tiempo real de la posición, velocidad y dirección del coche autónomo.
- LiDAR (Light Detection and Ranging): uso de haces de láser para crear un mapa 3D detallado del entorno del vehículo. Esta tecnología ayuda al coche a detectar y medir objetos a su alrededor, incluyendo otros vehículos, peatones y señales de tráfico.
- Radar (Radio Detection and Ranging): uso de ondas de radio para detectar la velocidad, la distancia y la dirección de los objetos. El radar es particularmente útil en condiciones climáticas adversas y para detectar objetos a mayor distancia.
- Cámaras: para capturar información visual sobre el entorno del vehículo, incluyendo las marcas de los carriles, las señales de tráfico y las señales de carretera. Son esenciales para interpretar las señales visuales complejas y tomar decisiones basadas en los datos visuales.
¿Cuáles son los 6 grados de automatización en los vehículos?
Los 6 niveles de coches autónomos, definidos por la Sociedad de Ingenieros de Automoción (SAE) en su norma J3016, describen los grados de automatización en los vehículos. Aquí tiene un desglose:
- Nivel 0: sin automatización. Advertencias o asistencia momentánea, como el frenado automático de emergencia o las advertencias de punto ciego, pero sin automatización sostenida.
- Nivel 1: asistencia al conductor. Sistema automatizado único para soporte, como el control de crucero adaptativo (manteniendo la velocidad y la distancia) o la asistencia para mantener el carril.
- Nivel 2: automatización parcial. Combinación de sistemas, como la dirección y la aceleración/desaceleración, pero sin toma de decisiones.
- Nivel 3: automatización condicional. El coche se encarga de la mayoría de las tareas de conducción en condiciones específicas (por ejemplo, conducción en autopista). El sistema puede supervisar el entorno.
- Nivel 4: alta automatización. El coche funciona de forma independiente en escenarios predefinidos. No se requiere la atención del conductor en estas áreas.
- Nivel 5: automatización total. El vehículo puede realizar todas las tareas en todos los entornos que un conductor humano podría manejar. Es posible que no haya volante ni pedales.
Estos niveles ilustran la progresión desde los vehículos controlados por humanos hasta los sistemas totalmente autónomos capaces de gestionar todas las tareas de conducción.
¿Acepta el INS entradas de sensores de ayuda externos?
Los Sistemas de Navegación Inercial de nuestra empresa aceptan entradas de sensores de ayuda externos, como sensores de datos aéreos, magnetómetros, odómetros, DVL y otros.
Esta integración hace que el INS sea muy versátil y fiable, especialmente en entornos sin GNSS.
Estos sensores externos mejoran el rendimiento general y la precisión del INS al proporcionar datos complementarios.
¿Cuál es la diferencia entre IMU e INS?
La diferencia entre una unidad de medición inercial (IMU) y un sistema de navegación inercial (INS) radica en su funcionalidad y complejidad.
Una IMU (unidad de medición inercial) proporciona datos brutos sobre la aceleración lineal y la velocidad angular del vehículo, medidos por acelerómetros y giróscopos. Suministra información sobre balanceo, cabeceo, guiñada y movimiento, pero no calcula la posición ni los datos de navegación. La IMU está específicamente diseñada para transmitir datos esenciales sobre el movimiento y la orientación para el procesamiento externo con el fin de determinar la posición o la velocidad.
Por otro lado, un INS (sistema de navegación inercial) combina los datos de la IMU con algoritmos avanzados para calcular la posición, la velocidad y la orientación de un vehículo a lo largo del tiempo. Incorpora algoritmos de navegación como el filtrado de Kalman para la fusión e integración de sensores. Un INS proporciona datos de navegación en tiempo real, incluyendo la posición, la velocidad y la orientación, sin depender de sistemas de posicionamiento externos como el GNSS.
Este sistema de navegación se utiliza normalmente en aplicaciones que requieren soluciones de navegación integrales, particularmente en entornos sin GNSS, como UAV militares, barcos y submarinos.
¿Cuál es la diferencia entre AHRS e INS?
La principal diferencia entre un sistema de referencia de actitud y rumbo (AHRS) y un sistema de navegación inercial (INS) radica en su funcionalidad y en el alcance de los datos que proporcionan.
El AHRS proporciona información de orientación, concretamente, la actitud (cabeceo, balanceo) y el rumbo (guiñada) de un vehículo o dispositivo. Normalmente, utiliza una combinación de sensores, como giroscopios, acelerómetros y magnetómetros, para calcular y estabilizar la orientación. El AHRS emite la posición angular en tres ejes (cabeceo, balanceo y guiñada), lo que permite a un sistema comprender su orientación en el espacio. A menudo se utiliza en la aviación, los UAV, la robótica y los sistemas marinos para proporcionar datos precisos de actitud y rumbo, que son fundamentales para el control y la estabilización del vehículo.
Un INS no sólo proporciona datos de orientación (como un AHRS), sino que también rastrea la posición, la velocidad y la aceleración de un vehículo a lo largo del tiempo. Utiliza sensores inerciales para estimar el movimiento en el espacio 3D sin depender de referencias externas como el GNSS. Combina los sensores que se encuentran en el AHRS (giroscopios, acelerómetros), pero también puede incluir algoritmos más avanzados para el seguimiento de la posición y la velocidad, integrándose a menudo con datos externos como el GNSS para mejorar la precisión.
En resumen, el AHRS se centra en la orientación (actitud y rumbo), mientras que el INS proporciona un conjunto completo de datos de navegación, incluyendo la posición, la velocidad y la orientación.