Continuidad de la navegación durante las interrupciones del GNSS
Nuestras soluciones de navegación ofrecen varias ventajas para los vehículos terrestres no tripulados (UGV), especialmente en entornos difíciles donde otras tecnologías de navegación pueden fallar.
Sus UGV ahora pueden operar eficazmente en entornos donde las señales GNSS no están disponibles, no son fiables o están intencionalmente bloqueadas (por ejemplo, cañones urbanos, túneles subterráneos o campos de batalla disputados). Esto es fundamental para las misiones de rescate y defensa donde la interferencia del GNSS puede comprometer la precisión de la navegación de su UGV.
Gracias a nuestra gama de soluciones de navegación, obtiene datos de navegación ininterrumpidos sin depender de referencias externas como el GNSS. Esto permite que su UGV mantenga el conocimiento de la situación y la autonomía incluso cuando se pierden las comunicaciones o las señales externas.

Alta precisión en entornos dinámicos
Los datos en tiempo real se recopilan constantemente con nuestros sistemas de navegación, sobre la posición, la velocidad y la orientación (balanceo, cabeceo, guiñada) del vehículo, lo que permite un control preciso incluso en entornos muy dinámicos, como terrenos accidentados o condiciones off-road.
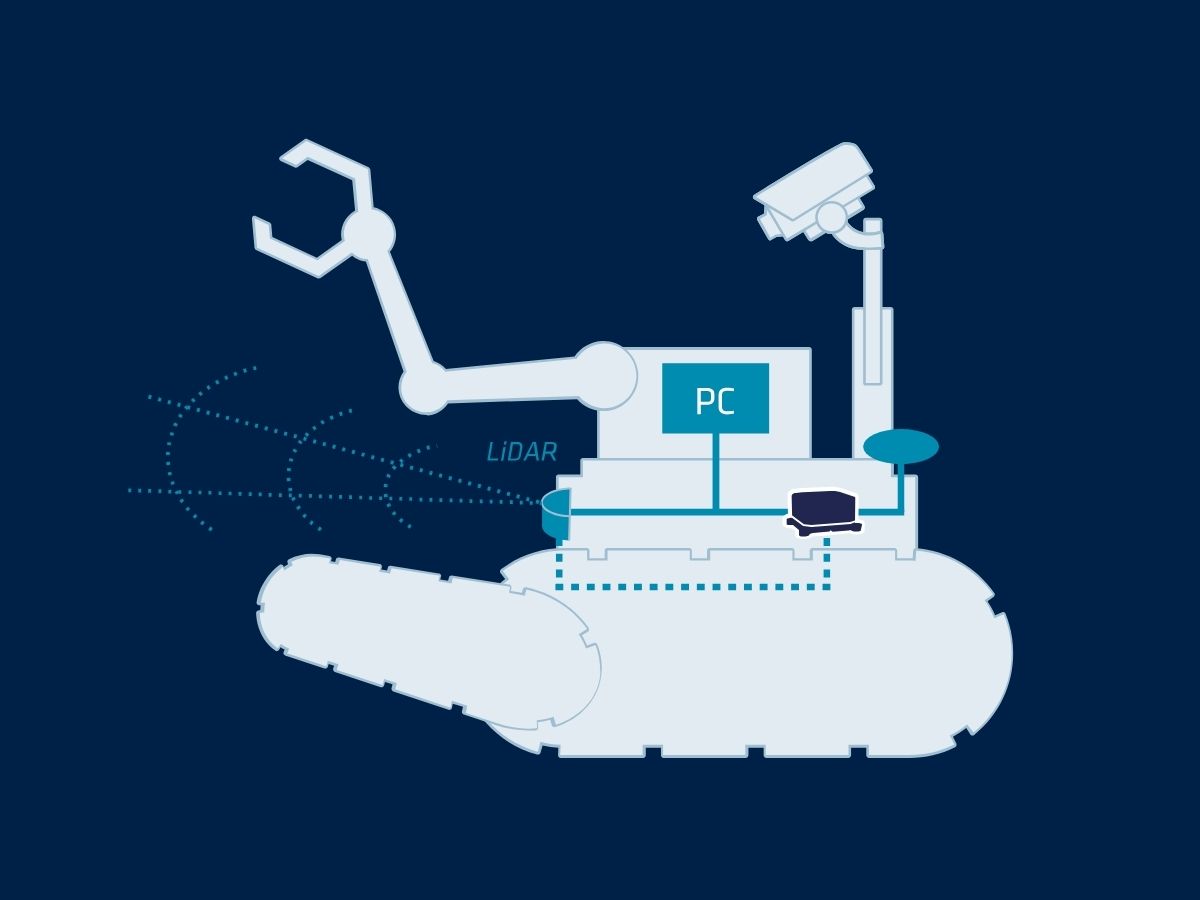
La precisión de nuestros sensores garantiza un rendimiento fiable en entornos complejos y de rápida evolución. Para aumentar los datos de localización del vehículo, puede integrar nuestro INS con otros sensores a bordo, como cámaras, LiDAR y odometría, para formar un sistema de navegación multisensor. Esta fusión de sensores mejora la precisión general de la localización y el conocimiento de la situación.
Además, ofrecen datos de navegación altamente fiables, lo que reduce las posibilidades de colisión o fallo de la misión. Esto es particularmente crucial en operaciones militares o entornos peligrosos, donde la seguridad es primordial.
Robustez en condiciones adversas
Un vehículo terrestre autónomo suele operar en entornos extremos (como desiertos, bosques o zonas de catástrofe) donde factores ambientales como el polvo, el clima o las interferencias electromagnéticas pueden afectar a otros sistemas de navegación.
Nuestras soluciones son altamente resistentes a tales condiciones, asegurando un rendimiento robusto. Al proporcionar datos de orientación y posicionamiento de alta precisión, nuestros sensores mejoran la capacidad de un UGV para planificar y seguir de forma autónoma rutas complejas, minimizando la intervención humana.
Esta capacidad mejora la eficiencia operativa en aplicaciones de defensa, logística e industriales.

Selección de productos
Nuestras soluciones se integran a la perfección con plataformas UGV para ofrecer un rendimiento fiable incluso en las condiciones más difíciles.

Pulse-40

Ellipse-A

Ellipse-E

Ellipse-N

Ellipse-D

Ekinox Micro
Folleto de aplicaciones de defensa
¡Reciba nuestro folleto directamente en su bandeja de entrada!
Casos prácticos
Explore las historias de éxito detrás de nuestras soluciones inerciales para UGV. Conozca el impacto significativo de nuestros avanzados sistemas de navegación en las operaciones de UGV en múltiples industrias.
A través de cada caso de estudio, examinamos ejemplos tangibles que revelan cómo nuestros avanzados sensores inerciales y la tecnología GNSS han proporcionado consistentemente una precisión, fiabilidad y rendimiento inigualables en situaciones prácticas. Obtenga información detallada y ejemplos prácticos de cómo nuestras soluciones abordan desafíos complejos e impulsan la excelencia operativa.
Sumérjase en nuestros casos de estudio para ver cómo nuestras soluciones inerciales pueden mejorar sus proyectos y lograr resultados sobresalientes.


Hablan de nosotros
Escuche de primera mano a los innovadores y clientes que han adoptado nuestra tecnología.
Sus testimonios e historias de éxito ilustran el impacto significativo que tienen nuestros sensores en aplicaciones prácticas de navegación de UGV.
Descubra otras aplicaciones de sistemas no tripulados
Explore las diversas aplicaciones de los sistemas inerciales en plataformas no tripuladas en tierra, mar y aire. Desde vehículos terrestres autónomos y UAV hasta drones submarinos y embarcaciones de superficie, nuestras tecnologías garantizan una navegación, estabilidad y control precisos incluso en los entornos más difíciles.
¿Tiene alguna pregunta?
¿Qué es GNSS vs GPS?
GNSS significa Sistema Global de Navegación por Satélite y GPS significa Sistema de Posicionamiento Global. Estos términos se utilizan a menudo indistintamente, pero se refieren a conceptos diferentes dentro de los sistemas de navegación basados en satélites.
GNSS es un término colectivo para todos los sistemas de navegación por satélite, mientras que GPS se refiere específicamente al sistema estadounidense. Incluye múltiples sistemas que proporcionan una cobertura global más completa, mientras que GPS es sólo uno de esos sistemas.
Se obtiene una mayor precisión y fiabilidad con GNSS, al integrar datos de múltiples sistemas, mientras que GPS por sí solo podría tener limitaciones dependiendo de la disponibilidad de satélites y las condiciones ambientales.
¿Qué son el jamming y el spoofing?
El jamming y el spoofing son dos tipos de interferencia que pueden afectar significativamente la fiabilidad y la precisión de los sistemas de navegación por satélite como el GNSS.
El jamming se refiere a la interrupción intencional de las señales de satélite mediante la transmisión de señales de interferencia en las mismas frecuencias utilizadas por los sistemas GNSS. Esta interferencia puede sobrecargar o ahogar las señales de satélite legítimas, lo que hace que los receptores GNSS no puedan procesar la información con precisión. El jamming se utiliza comúnmente en operaciones militares para interrumpir las capacidades de navegación de los adversarios, y también puede afectar a los sistemas civiles, lo que lleva a fallos de navegación y desafíos operativos.
El spoofing, por otro lado, implica la transmisión de señales falsificadas que imitan las señales GNSS genuinas. Estas señales engañosas pueden inducir a los receptores GNSS a calcular posiciones u horas incorrectas. El spoofing se puede utilizar para desviar o desinformar a los sistemas de navegación, lo que podría provocar que vehículos o aeronaves se desvíen de su rumbo o proporcionar datos de ubicación falsos. A diferencia del jamming, que simplemente obstruye la recepción de la señal, el spoofing engaña activamente al receptor presentando información falsa como legítima.
Tanto el jamming como el spoofing representan amenazas significativas para la integridad de los sistemas que dependen del GNSS, lo que exige contramedidas avanzadas y tecnologías de navegación resistentes para garantizar un funcionamiento fiable en entornos disputados o desafiantes.