Mayor rendimiento en condiciones de baja dinámica
Los sistemas de cartografía móvil con IMU integradas proporcionan datos en tiempo real, ofreciendo información crucial sobre la dinámica ambiental.
Estos sistemas permiten la creación de mapas de alta definición (mapas HD) para vehículos autónomos, mejoran la precisión y reducen el riesgo de lagunas de datos, lo que los hace esenciales para aplicaciones como la cartografía de infraestructuras, los estudios de carreteras y el análisis ambiental.
Con la integración inercial y GNSS avanzada, los sistemas de cartografía móvil ofrecen una configuración rápida y una inicialización veloz, lo que minimiza el tiempo de inactividad y permite una rápida recopilación de datos. Esto es particularmente valioso en escenarios con plazos ajustados, como los estudios móviles de infraestructuras o la cartografía de respuesta a emergencias, donde el despliegue rápido es crucial.
En entornos de baja dinámica, como vehículos que se mueven lentamente por zonas urbanas o en interiores, los sistemas inerciales de alto rendimiento mantienen datos precisos de posicionamiento y orientación. Mientras que los sistemas GPS tradicionales pueden tener dificultades en tales condiciones, un INS integrado con GNSS garantiza datos continuos y fiables, incluso en entornos sin cobertura GNSS.
Al garantizar un rendimiento constante, estos sistemas producen modelos 3D precisos, mapas topográficos y productos geoespaciales, independientemente de la velocidad de movimiento o la complejidad ambiental.

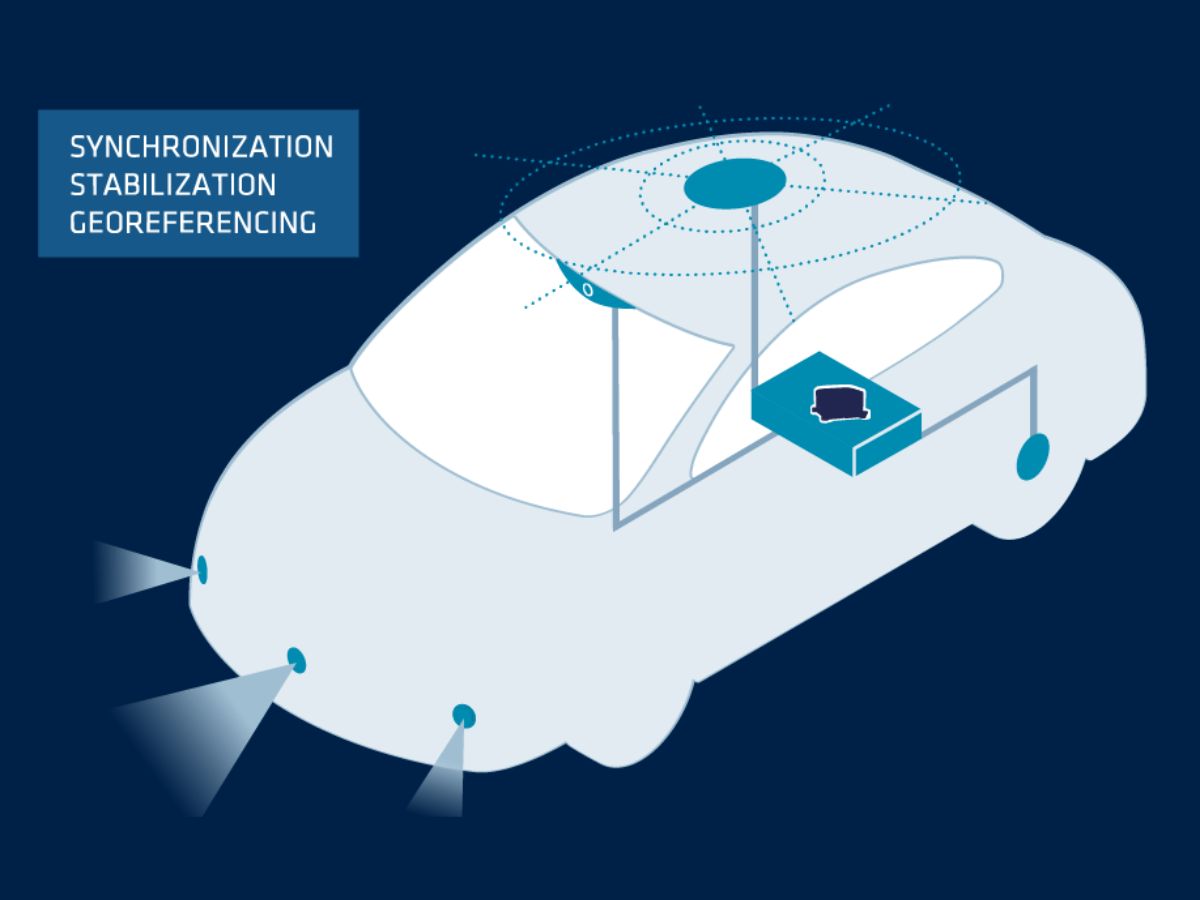
Interfaz de comunicación única con sincronización integrada
Nuestros sistemas inerciales admiten un proceso de integración optimizado con una única interfaz de comunicación. El INS puede servir como eje central para los datos de los sensores GNSS y LiDAR. Mediante el uso de protocolos de comunicación estándar de la industria, Ethernet o CAN bus, puede conectar el INS con su receptor GNSS y su sistema LiDAR móvil, lo que minimiza la complejidad del hardware y evita la necesidad de múltiples enlaces de comunicación.
Nuestras soluciones INS vienen con capacidades de sincronización integradas que garantizan una fusión de datos perfecta entre los datos GNSS, LiDAR e inerciales.
El INS puede servir como reloj maestro PTP, sincronizando las marcas de tiempo de todos los sensores, lo cual es fundamental para las operaciones SLAM. Con las funciones de reloj en tiempo real (RTC) y la capacidad de gestionar la temporización GNSS y las señales de disparo externas, el INS garantizará que los datos GNSS y LiDAR estén alineados correctamente para un procesamiento SLAM preciso.
Capacidades de post-procesamiento y en tiempo real
Los sistemas de cartografía móvil (MMS) ofrecen capacidades tanto en tiempo real como de post-procesamiento, lo que permite a los usuarios acceder a datos inmediatos a la vez que refinan los resultados posteriormente para mejorar la precisión.
La adquisición de datos en tiempo real permite a los ingenieros o topógrafos realizar evaluaciones in situ, mientras que el software de post-procesamiento garantiza que el resultado final sea lo más preciso posible. Los sistemas inerciales contribuyen significativamente a este proceso manteniendo datos de posición consistentes y fiables, incluso cuando las señales de los satélites no están disponibles o están degradadas.
Las plataformas de cartografía móvil equipadas con sistemas inerciales ofrecen flexibilidad en la recopilación y el análisis de datos. Los operadores pueden ajustar los parámetros sobre la marcha, asegurándose de que sus proyectos de cartografía cumplen las normas de precisión requeridas.
Para un mayor perfeccionamiento, ofrecemos Qinertia, un potente software de post-procesamiento que mejora la precisión de la trayectoria mejorando los datos GNSS e INS a posteriori, lo que puede complementar los flujos de trabajo de cartografía basados en SLAM.

Nuestras soluciones para Mobile Mapping
Nuestros sistemas de navegación inercial (INS) están diseñados específicamente para los mercados de topografía, ofreciendo un alto rendimiento y facilidad de uso. Construidos sobre sensores inerciales avanzados, integran algoritmos de vanguardia y tecnología GNSS para ofrecer datos precisos de navegación y posicionamiento. Nuestros sistemas son altamente adaptables, con componentes configurables para satisfacer las necesidades específicas de cada aplicación.

Ekinox

Apogee

Navsight Land-Air
Folleto de aplicaciones de cartografía
¡Reciba nuestro folleto directamente en su bandeja de entrada!
Casos prácticos
SBG Systems se ha asociado con empresas líderes de diversos sectores para ofrecer soluciones inerciales de alto rendimiento para la cartografía móvil. Nuestros casos prácticos muestran las historias de éxito de proyectos en los que nuestra tecnología desempeñó un papel fundamental en la adquisición y el análisis de datos.



Hablan de nosotros
Escuche de primera mano a los innovadores y clientes que han adoptado nuestra tecnología.
Sus testimonios e historias de éxito ilustran el impacto significativo que tienen nuestros sensores en aplicaciones prácticas de vehículos autónomos.
Descubra más aplicaciones de topografía
SBG Systems ofrece sistemas de navegación inercial y sensores de movimiento de alto rendimiento que desempeñan un papel fundamental en la topografía terrestre, marina y aérea. Desde el dragado y la cartografía portuaria, pasando por la cartografía de interiores y la fotogrametría UAV, nuestras soluciones inerciales ayudan a los profesionales geoespaciales a recopilar datos precisos de posición, orientación y movimiento en todo tipo de entornos.
Explore nuestras aplicaciones de topografía.
¿Tiene alguna pregunta?
Nuestra sección de preguntas frecuentes cubre las preguntas más comunes sobre los sistemas de cartografía móvil, incluyendo información sobre las tecnologías implicadas, las mejores prácticas y cómo integrar nuestros productos en sus soluciones.
¿Qué es SLAM?
SLAM, que significa Simultaneous Localization and Mapping (localización y cartografía simultáneas), es una técnica computacional utilizada en robótica y visión artificial para construir un mapa de un entorno desconocido, al tiempo que se realiza un seguimiento de la ubicación de un agente dentro de ese entorno. Esto es particularmente útil en escenarios donde el GNSS no está disponible, como en interiores o en zonas urbanas densas.
Los sistemas SLAM determinan la posición y orientación del agente en tiempo real. Esto implica el seguimiento del movimiento del robot o dispositivo mientras navega por el entorno. Mientras el agente se mueve, el sistema SLAM crea un mapa del entorno. Esto puede ser una representación 2D o 3D, que captura el diseño, los obstáculos y las características del entorno.
Estos sistemas a menudo utilizan múltiples sensores, como cámaras, LiDAR o unidades de medición inercial (IMU), para recopilar datos sobre el entorno. Estos datos se combinan para mejorar la precisión tanto de la localización como de la cartografía.
Los algoritmos SLAM procesan los datos entrantes para actualizar continuamente el mapa y la ubicación del agente. Esto implica cálculos matemáticos complejos, incluyendo técnicas de filtrado y optimización.
¿Qué es la cinemática en tiempo real?
La cinemática en tiempo real (RTK) es una técnica precisa de navegación por satélite utilizada para mejorar la exactitud de los datos de posición derivados de las mediciones del Sistema Mundial de Navegación por Satélite (GNSS). Se emplea ampliamente en aplicaciones como la topografía, la agricultura y la navegación de vehículos autónomos.
Mediante el uso de una estación base que recibe señales GNSS y calcula su posición con gran exactitud. A continuación, transmite los datos de corrección a uno o varios receptores móviles (rovers) en tiempo real. Los rovers utilizan estos datos para ajustar sus lecturas GNSS, mejorando su precisión posicional.
RTK proporciona una precisión a nivel de centímetros corrigiendo las señales GNSS en tiempo real. Esto es significativamente más preciso que el posicionamiento GNSS estándar, que normalmente ofrece una precisión de unos pocos metros.
Los datos de corrección de la estación base se envían a los rovers a través de varios métodos de comunicación, como la radio, las redes celulares o Internet. Esta comunicación en tiempo real es crucial para mantener la precisión durante las operaciones dinámicas.
¿Qué es el Posicionamiento Preciso de Punto?
El Posicionamiento Preciso Punto (PPP) es una técnica de navegación por satélite que ofrece un posicionamiento de alta precisión mediante la corrección de errores de señal de satélite. A diferencia de los métodos GNSS tradicionales, que a menudo se basan en estaciones de referencia terrestres (como en RTK), el PPP utiliza datos de satélite globales y algoritmos avanzados para proporcionar información de localización precisa.
El PPP funciona en cualquier parte del mundo sin necesidad de estaciones de referencia locales. Esto lo hace adecuado para aplicaciones en entornos remotos o difíciles donde la infraestructura terrestre es deficiente. Mediante el uso de datos precisos de órbita y reloj de los satélites, junto con las correcciones de los efectos atmosféricos y multitrayecto, el PPP minimiza los errores comunes del GNSS y puede alcanzar una precisión de nivel centimétrico.
Si bien el PPP se puede utilizar para el posicionamiento post-procesado, que implica el análisis de los datos recopilados a posteriori, también puede proporcionar soluciones de posicionamiento en tiempo real. El PPP en tiempo real (RTPPP) está cada vez más disponible, lo que permite a los usuarios recibir correcciones y determinar su posición en tiempo real.
¿Qué es un reloj de tiempo real?
Un reloj de tiempo real (RTC) es un dispositivo electrónico diseñado para realizar un seguimiento de la hora y la fecha actuales, incluso cuando está apagado. Ampliamente utilizados en aplicaciones que requieren un cronometraje preciso, los RTC cumplen varias funciones clave.
En primer lugar, mantienen un recuento preciso de segundos, minutos, horas, días, meses y años, a menudo incorporando cálculos de años bisiestos y días de la semana para una precisión a largo plazo. Los RTC funcionan con baja potencia y pueden funcionar con batería de respaldo, lo que les permite seguir funcionando durante las interrupciones. También proporcionan marcas de tiempo para las entradas de datos y los registros, lo que garantiza una documentación precisa.
Además, los RTC pueden activar operaciones programadas, permitiendo que los sistemas se activen desde estados de bajo consumo o realicen tareas en momentos específicos. Desempeñan un papel crucial en la sincronización de múltiples dispositivos (por ejemplo, GNSS/INS), asegurando que operen de forma cohesionada.
Los RTC son parte integral de varios dispositivos, desde ordenadores y equipos industriales hasta dispositivos IoT, mejorando la funcionalidad y garantizando una gestión fiable del tiempo en múltiples aplicaciones.