
Der NED-Koordinatenrahmen (North-East-Down) dient als weit verbreitetes Referenzsystem für die Navigation und Trägheitsmessungen.
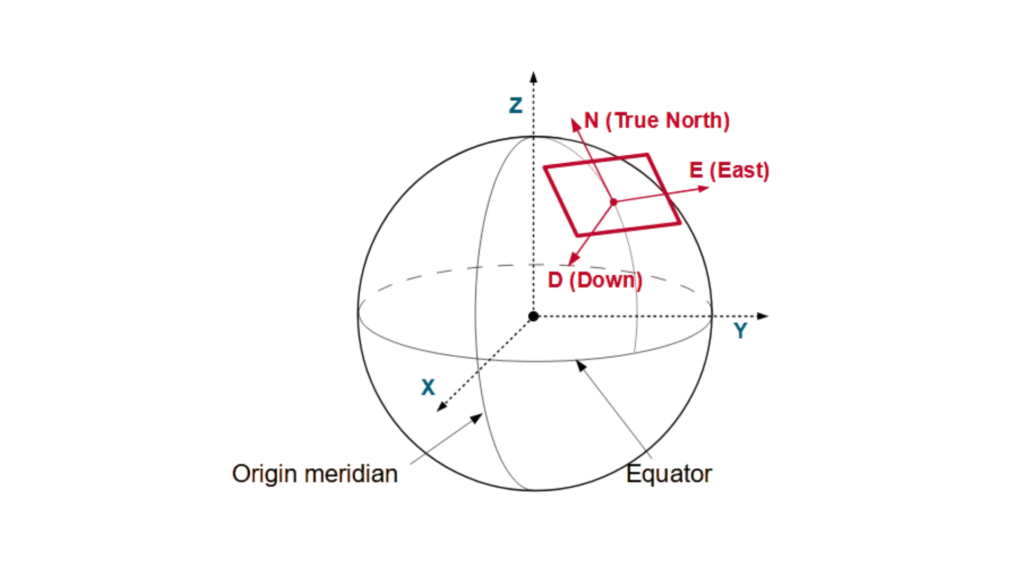
Der North-East-Down (NED)-Frame dient als lokaler Referenzrahmen, der durch seine ECEF-Koordinaten definiert ist. Typischerweise ist er fest mit dem Fahrzeug oder der Plattform verbunden und bewegt sich mit dem Body-Frame. Dieser Frame positioniert die Nord- und Ostachsen in einer Ebene, die die Erdoberfläche an ihrem aktuellen Standort tangiert, basierend auf dem WGS84-Ellipsoidmodell.
Er besteht aus drei orthogonalen Achsen: Die Nordachse zeigt nach geografisch Nord, die Abwärtsachse erstreckt sich in Richtung Erdinneres (entgegengesetzt zur lokalen Aufwärtsrichtung), und die Ostachse vervollständigt das rechtshändige System, indem sie nach Osten zeigt (senkrecht zu Nord).
In ähnlicher Weise kann ein Fahrzeug oder eine Plattform den East-North-Up (ENU)-Frame lokal angebracht haben, der sich mit dem System bewegt. Im Gegensatz zum NED-Frame richtet der ENU-Frame seine Achsen anders aus: Die Nordachse zeigt weiterhin nach geografisch Nord, aber die Aufwärtsachse erstreckt sich vom Erdinneren weg, während die Ostachse ihre rechtshändige Systemausrichtung beibehält, indem sie nach Osten zeigt.
Dieses rechtshändige Koordinatensystem vereinfacht Berechnungen für Flugzeuge, Seeschiffe und autonome Fahrzeuge, indem es sich an natürlichen Bewegungsrichtungen ausrichtet.
NED-Anwendungen verwenden
Eine Drohne verlässt sich auf ein Autopilotsystem, um ihre Flugbahn innerhalb des NED-Koordinatenrahmens zu berechnen. Wenn die Drohne in nördlicher Richtung fliegt, nimmt ihre Position in nördlicher Richtung zu. Umgekehrt nimmt der Wert ihrer Down-Koordinate ab, wenn die Drohne aufsteigt, da Down positiv nach unten gerichtet ist.
Umgekehrt funktioniert das INS (Inertial Navigation System) eines Schiffes, indem es seine Bewegung relativ zum NED-Frame verfolgt. Wenn sich das Schiff ostwärts bewegt, nimmt seine Ost-Koordinate zu. Umgekehrt steigt seine Down-Koordinate, wenn das Schiff taucht.
Ein selbstfahrendes Auto nutzt den NED-Frame, um seine Position zu bestimmen. Die Nord-Koordinate des Fahrzeugs nimmt zu, wenn es sich nordwärts bewegt, während Unebenheiten oder Vertiefungen im Gelände Veränderungen im Down-Wert verursachen.
Präzisionsgelenkte Munition verlässt sich auf den NED-Frame, um ihre Flugbahn anzupassen. Wenn eine Rakete auf ihr Ziel zufliegt, nimmt die Down-Koordinate zu, was eine genaue Zielerfassung gewährleistet.
AUVs (Autonomous Underwater Vehicles) nutzen den NED-Frame zur Navigation. Wenn sich ein AUV in nordöstlicher Richtung bewegt, nehmen sowohl die Nord- als auch die Ost-Koordinate zu, während sich Tiefenänderungen auf die Down-Koordinate auswirken.
Das NED-System wurde entwickelt, um Bewegungen an der natürlichen Ausrichtung der Erde auszurichten und so die Navigation zu vereinfachen. Dieses System wird von Ingenieuren, Piloten und Wissenschaftlern verwendet, um die Präzision in Positionierungs-, Führungs- und Steuerungsanwendungen zu verbessern.