
Das Sensorkoordinatensystem oder körperfeste Koordinatensystem ist ein lokales Bezugssystem, das sich mit einem Sensor oder einer Plattform bewegt, z. B. einer Drohne, einem Fahrzeug, einem Roboter oder einer Rakete. Es definiert die Ausrichtung und Bewegung relativ zur physischen Struktur des Sensors. Ingenieure verwenden das körperfeste Koordinatensystem, um Messungen wie Beschleunigung, Winkelgeschwindigkeit und Geschwindigkeit direkt aus der Perspektive des Sensors auszudrücken.
Das Sensor- (Körper-) Koordinatensystem – oft als Körperrahmen oder Fahrzeugrahmen bezeichnet – dient als Referenzrahmen, der an einer sich bewegenden Plattform befestigt ist, z. B. einer Drohne, einem Auto, einer Rakete oder einem Unterwasserfahrzeug. Ingenieure verwenden diesen Rahmen, um die Bewegung und Orientierung der Plattform relativ zu sich selbst zu beschreiben, was ihn für Navigation, Steuerung und Sensorfusion unerlässlich macht.
In den meisten Anwendungen montieren Benutzer Sensoren wie IMUs, GNSS-Empfänger oder AHRS-Einheiten direkt am Fahrzeug. Diese Sensoren melden Daten in ihrem eigenen Koordinatensystem, das normalerweise mit dem Körperrahmen übereinstimmt. Es besteht aus drei orthogonalen Achsen, die ein rechtshändiges Koordinatensystem bilden:
- Die X-Achse zeigt nach vorne, in Richtung der Bewegung oder der Nase des Sensors.
- Die Y-Achse zeigt nach rechts (Steuerbord für Schiffs- oder Flugzeugsysteme).
- Die Z-Achse zeigt nach unten oder relativ zur Basis des Sensors, je nach Anwendung.
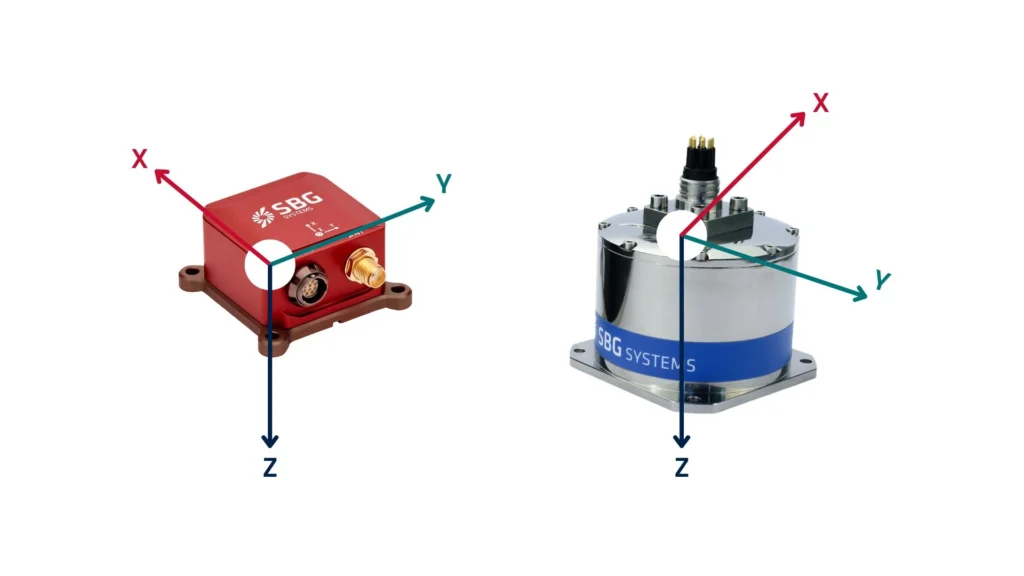
Diese feste Ausrichtung ermöglicht es dem System, zu messen, wie es sich in seinem eigenen Raum bewegt oder dreht, und nicht relativ zur Erde.
Beispiele für Anwendungen des körperfesten Koordinatensystems
Die IMU einer Drohne ist dafür verantwortlich, die Beschleunigung und Drehung in ihrem eigenen Bezugssystem zu messen. Wenn die Drohne sich nach vorne neigt, erfasst sie die Winkelgeschwindigkeit um ihre Y-Achse. Das System überträgt diese Daten an den Flugregler, wodurch die Drohne stabilisiert und Flugbefehle präzise ausgeführt werden können. Beispielsweise verwendet das Autopilotsystem der Drohne Sensordaten im Körperrahmen, um den Flug zu stabilisieren und Manöver wie Gieren, Neigen und Rollen auszuführen. Das System interpretiert Bewegungen direkt und drückt sie als Vorwärts-, Seitwärts- und Vertikalbewegungen relativ zum eigenen Rahmen der Drohne aus.
Ein selbstfahrendes Auto hingegen erfasst seine lineare Beschleunigung entlang der X- (vorwärts), Y- (seitwärts) und Z- (vertikal) Achse in seinem Körperrahmen. Diese Fähigkeit ermöglicht es dem Fahrzeug, seine Geschwindigkeit anzupassen, die Spur zu halten und auf Veränderungen im Gelände zu reagieren. Dieses Koordinatensystem erleichtert die Interpretation von Lidar-, Radar- und Trägheitsdaten. Das Steuerungssystem des Autos verwendet diese Messwerte, um in Echtzeit Fahrentscheidungen basierend auf der eigenen Ausrichtung zu treffen.
Das Navigationssystem einer Rakete verwendet den Körperrahmen zur Orientierungsverfolgung. Während des Manövrierens erfasst der Bordsensor Drehgeschwindigkeiten und Beschleunigungen in körperfesten Achsen, was präzise Kurskorrekturen ermöglicht. Das bordeigene Navigationssystem der Rakete verwendet den Körperrahmen, um Beschleunigung und Winkelgeschwindigkeit zu verfolgen, wodurch es seine Flugbahn und Ausrichtung basierend auf seiner aktuellen Position und der Ausrichtung des Koordinatenrahmens anpassen kann.
Ein Roboterarm verwendet einen Körperrahmen, um Gelenkbewegungen und Endeffektorpositionen zu berechnen. Die Position und Ausrichtung jedes Motors werden in diesem lokalen Rahmen gemessen, um eine Echtzeitsteuerung zu gewährleisten.
Herausforderungen bei der Sensorausrichtung
In der Praxis sind Sensoren nicht immer perfekt auf das körperfeste Koordinatensystem ausgerichtet. Um dies zu beheben, implementieren Ingenieure häufig Frame-Rotationskorrekturen, die das Koordinatensystem des Sensors mit dem körperfesten Koordinatensystem des Fahrzeugs ausrichten. Dies gewährleistet präzise Messwerte für Berechnungen im Zusammenhang mit Position, Geschwindigkeit und Orientierung. Dies ist grundlegend für jedes System, das sich bewegt und seine Umgebung erfasst. Es spielt eine entscheidende Rolle bei der Echtzeitnavigation, -steuerung und -stabilisierung und ist daher in der Luft- und Raumfahrt, im Verteidigungsbereich, in der Automobilindustrie und in Robotersystemen unerlässlich.
Erzählen Sie uns von Ihrem Projekt