Autonomes Fahrzeug-Engineering: Die Navigation von Zurich UAS Racing mit Ellipse-D
Zurich UAS Racing hat kritische Probleme mit der Positionsdrift gelöst, die den fahrerlosen Betrieb für sie bisher unmöglich gemacht haben. Dieser Durchbruch im autonomen Fahrzeugbau ermöglicht es dem Team nun, seine Reise zum Autocross-Wettbewerb im berühmten Formula Student Wettbewerb zu beginnen.
Ellipse-D ermöglicht es uns, eine absolute Position unseres Autos auf der Strecke zu erhalten. Eine genaue Position ist für den Betrieb unseres fahrerlosen Systems unerlässlich. Eines unserer größten Probleme war die Positionsdrift im Laufe der Zeit. Mit der Ellipse-D werden wir in der Lage sein, den Autocross-Wettbewerb in Angriff zu nehmen, was uns bisher unmöglich war. | Finn Scheller, C-Leader des Zurich UAS Racing Teams.

Der Team-Hintergrund im Bereich autonomes Fahrzeugtechnik
Zurich UAS Racing (ZUR) ist ein leidenschaftliches Formula Student Team der Zürcher Hochschule für Angewandte Wissenschaften in Winterthur, Schweiz. Die ambitionierte Studierendenvereinigung wurde 2019 gegründet und nimmt am weltweit größten Konstruktionswettbewerb, Formula Student, teil, indem sie Elektro- und autonome Autos baut, um gegen Universitäten aus der ganzen Welt anzutreten.

Das Team ist auf über 70 motivierte Studierende aus verschiedenen Studiengängen angewachsen, die alle durch ihr Ziel vereint sind, die Rennleistung zu optimieren und die autonome Fahrzeugtechnik voranzutreiben.
Formula Student
Der international hoch angesehene Formula Student Wettbewerb fordert Studententeams heraus, Formelrennwagen zu entwerfen und zu bauen, die in verschiedenen Disziplinen antreten, darunter Konstruktion, Kostenanalyse und dynamische Streckenveranstaltungen.

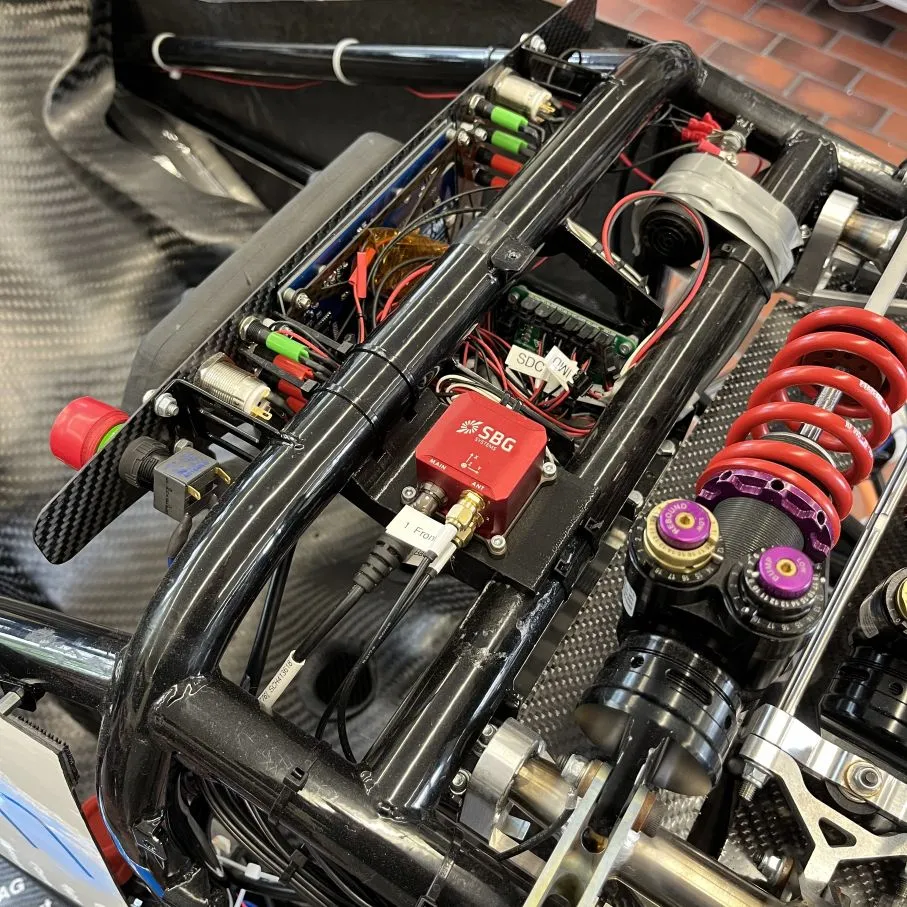
Das Auto: ZUR04
Die Reise von ZUR begann mit ihrem ersten funktionstüchtigen Auto im Jahr 2021, wobei sie seit 2022 erfolgreich an Veranstaltungen für Elektrofahrzeuge (EV) teilnehmen. Ihr fahrerloser Rennwagen, ZUR04, repräsentiert den neuesten Stand der studentischen Entwicklung autonomer Fahrzeuge mit vier elektrischen Radnabenmotoren, die eine Gesamtleistung von 140 kW erzeugen und eine Beschleunigung von 0 auf 100 km/h in nur 2,5 Sekunden ermöglichen.
Das Fahrzeug ist sowohl für das Fahren mit menschlichem Fahrer als auch für autonomes Fahren ausgelegt, mit einer Leistung, die mit professionellen Rennwagen vergleichbar ist. Das fahrerlose System befindet sich derzeit in der Testphase.
Technische Anforderungen von Zurich UAS Racing
ZUR benötigte ein fortschrittliches Inertial Navigation System (INS), das sich nahtlos in sein autonomes Rennsystem integrieren lässt und gleichzeitig die hohen Anforderungen des Hochgeschwindigkeitswettbewerbs erfüllt.
Ihre größte Herausforderung bestand darin, eine zuverlässige Positionierung in der dynamischen Umgebung des Rennsports zu erreichen, wo traditionelle Lokalisierungssysteme aufgrund von Positionsdrift im Laufe der Zeit oft versagen.
Das System musste eine absolute Positionsgenauigkeit bieten, die für den Betrieb ihres fahrerlosen Systems unerlässlich ist, insbesondere für den anspruchsvollen Autocross-Wettbewerb, der eine präzise Navigation durch komplexe Kegelkonfigurationen erfordert.
Zusammenfassend waren dies die entscheidenden Probleme:
- Positionsdrift: Deutliche Drift im Laufe der Zeit, die eine genaue Lokalisierung verhindert.
- Autocross-Beschränkung: Unfähigkeit, aufgrund von Positionierungsproblemen an der Autocross-Disziplin teilzunehmen.
- Begrenzte Dateneinblicke: Unzureichende Fahrzeugdynamikdaten für die Softwareoptimierung.

Und dies waren die Kernanforderungen:
- Präzise Lokalisierung: Bedarf an absoluter Position auf der Strecke.
- ROS-Integration: Nahtlose Integration in das bestehende ROS-basierte autonome System.
- Kompakte Lösung: Leichte Einheit mit gutem Leistungsgewicht.
- Offene Dokumentation: Leicht zugängliche technische Ressourcen.
- Hohe Dynamik: Fähigkeit, extreme Rennbedingungen zu bewältigen.
Nach der Bewertung des Szenarios von ZUR haben wir unsere Ellipse-D empfohlen, ein Inertial Navigation System (INS), das speziell für anspruchsvolle Anwendungen entwickelt wurde, bei denen Präzision und Zuverlässigkeit von größter Bedeutung sind.
Unsere Lösung für autonomes Fahren: Ellipse-D
Ellipse-D ist das kleinste Dualantennen-RTK-GNSS/INS-System, das eine zentimetergenaue Positionierung und präzise Kursbestimmung für dynamische Rennanwendungen bietet.
Diese Technologie stellt einen bedeutenden Fortschritt bei den Engineering-Lösungen für autonome Fahrzeuge dar und bietet dem Team:
- Hohe Präzision: Zentimetergenaue Positionierungsgenauigkeit ist essentiell für die präzise Streckennavigation und Hindernisvermeidung beim autonomen Fahren.
- Doppelantennen-Kursbestimmung: Überlegene Leistung in anspruchsvollen Umgebungen, in denen magnetische Interferenzen durch Elektromotoren und elektronische Systeme traditionelle, kompassbasierte Systeme beeinträchtigen würden.
- Rennkonformität: Kompakte Bauweise und robuste Konstruktion, ideal für hochdynamische Rennanwendungen, mit außergewöhnlicher Vibrationsfestigkeit und Temperaturbeständigkeit.

Schließlich war der vierte Punkt, der für das Ziel von ZUR wesentlich war, die ROS-Integration, die, in ihren eigenen Worten, in Kombination mit den anderen Merkmalen das Gesamtpaket zur kostengünstigsten Lösung auf dem Markt machte:
“Das Hauptverkaufsargument für uns war die Open-Source-Dokumentation und die Interface-Bibliothek. Die umfassende Unterstützung durch ROS ist ebenfalls ein großer Vorteil für uns, da unser Auto bereits mit ROS läuft. Die Integration war also einfach. Wir schätzten auch die Unterstützung unseres Teams durch SBG Systems zur Verbesserung unserer Leistung dank ihrer Produkte. Im Vergleich zu anderen Anbietern solcher Produkte bot SBG Systems uns das beste Preis-Leistungs-Verhältnis”, betont Scheller.
Fortschrittliche Integration und Leistung
Der Integrationsprozess demonstrierte die Vielseitigkeit der Ellipse-D und die Effektivität des Support-Ansatzes von SBG Systems. Das System ist sowohl mit einer RaspberryPi- als auch mit einer NVIDIA Jetson-Computing-Plattform verbunden und nutzt sowohl die sbgECom-Bibliothek als auch das ROS2-Paket für einen umfassenden Datenzugriff und eine umfassende Datenverarbeitung.
Diese Architektur ermöglicht die Verteilung von Echtzeit-Navigationsdaten im gesamten autonomen System und behält gleichzeitig die für die Entwicklung kundenspezifischer Algorithmen erforderliche Flexibilität bei.
Das Team nutzt die Fähigkeiten der Ellipse-D auch zur Entwicklung fortschrittlicher Torque-Vectoring-Algorithmen, die die INS-Daten nutzen. Sie haben außerdem einen GNSS-RTK-basierten Rover und eine Basisstation gebaut, um präzise Ground-Truth-Daten für die Strecke zu liefern.
Zusätzlich zur Integration des INS in ihr fahrerloses Auto ZUR04, dessen Streckentests für diesen Sommer geplant sind, hat das Team das INS in sein neu gebautes Rennauto ZUR05 integriert. Die Ellipse-D wird auch eine Schlüsselkomponente im fahrerlosen Fahrzeug der nächsten Saison, dem ZUR06, sein.
Die Top-Drei-Auswahl von Zurich UAS Racing
ZUR hob drei herausragende Aspekte hervor, die sie an der Zusammenarbeit mit SBG Systems schätzen.
- Open-Source: Erstens schätzten sie den Open-Source-Ansatz, der mit ihrer Ausbildungsmission und Entwicklungsmethodik übereinstimmt. Die transparente Dokumentation und die Schnittstellenbibliotheken ermöglichen es den Studenten, das System zu verstehen und an ihre spezifischen Bedürfnisse anzupassen, was unschätzbare Lernmöglichkeiten im Bereich der autonomen Fahrzeugtechnik bietet.
- Exzellente Dokumentation: Das Team schätzte die umfassende und frei verfügbare Produktdokumentation, die ihren Integrationsprozess rationalisierte. Im Gegensatz zu vielen kommerziellen Systemen, die nur begrenzte technische Details liefern, ermöglichte der Ansatz von SBG Systems ein schnelles Verständnis und eine rasche Implementierung.
- Gute Kommunikation: Schließlich hoben sie die hervorragende Kommunikation und Unterstützung hervor und stellten fest, dass sie sich immer gehört fühlten und Antworten auf alle ihre Fragen erhielten. Dieser reaktionsschnelle Support erwies sich als entscheidend für ein Studententeam, das unter dem Druck enger Wettbewerbsfristen arbeitete.
Fazit
Die Implementierung begegnete der größten Herausforderung von ZUR: der Positionsdrift, die sie zuvor an der Teilnahme an der Autocross-Disziplin gehindert hatte. Mit der zentimetergenauen Genauigkeit und der Dualantennen-Kursbestimmung der Ellipse-D kann das Team nun mit Testläufen beginnen, mit dem Ziel, in der nächsten Saison (Sommer 2026) mit seinem Rennwagen der nächsten Generation fahrerlos anzutreten.

Diese Zusammenarbeit ist ein Beispiel für die Stärke von Partnerschaften zwischen Industrie und Bildung bei der Weiterentwicklung der Technologie autonomer Fahrzeuge.
“Ellipse ist der perfekte Einstieg in INS-Systeme. In Zukunft planen wir, leistungsfähigere Systeme in Verbindung mit unserem neu entwickelten Ethernet-basierten Fahrzeugsystem einzusetzen”, schließt Scheller.
Unser Engagement für die Unterstützung von Studententeams wie ZUR zeigt, wie der Zugang zu professioneller Navigationstechnologie die nächste Generation von Ingenieuren in die Lage versetzt, die Grenzen des Möglichen im autonomen Rennsport zu verschieben.
Ellipse-D
Ellipse-D ist ein kompaktes, hochleistungsfähiges, GNSS-gestütztes Trägheitsnavigationssystem, das zuverlässige Orientierungs-, Positions- und Seegangsmessungen liefert.
Es kombiniert eine IMU mit einem Dualband-GNSS-Empfänger und verwendet Sensorfusionsalgorithmen, um eine genaue Positionierung in schwierigen Umgebungen zu ermöglichen.
Es bietet eine Dualantennenfunktion für eine präzise Kursbestimmung unter statischen Bedingungen.

Fordern Sie ein Angebot für Ellipse-D an
Haben Sie Fragen?
Willkommen in unserem FAQ-Bereich! Hier finden Sie Antworten auf die häufigsten Fragen zu den Anwendungen, die wir vorstellen. Wenn Sie nicht finden, wonach Sie suchen, können Sie sich gerne direkt an uns wenden!
Wie funktionieren selbstfahrende Autos?
Selbstfahrende Autos sind Fahrzeuge, die mit hochentwickelten Systemen ausgestattet sind, die es ihnen ermöglichen, ohne menschliches Zutun zu navigieren und sich selbst zu steuern. Diese Fahrzeuge nutzen eine Kombination aus autonomen Fahrsensoren und Algorithmen, um ihre Umgebung wahrzunehmen, Entscheidungen zu treffen und selbstfahrende Aufgaben auszuführen. Ziel ist es, vollständige Autonomie zu erreichen, bei der das Fahrzeug alle Aspekte des Fahrens sicher und effizient bewältigen kann.
Selbstfahrende Autos sind auf eine Reihe von Schlüsseltechnologien angewiesen, um ihre Umgebung wahrzunehmen. Dazu gehören:
- GNSS (Global Navigation Satellite System): um Echtzeit-Updates über die Position, Geschwindigkeit und Richtung des selbstfahrenden Autos zu erhalten.
- INS (Inertial Navigation Systems): um die Genauigkeit bei GNSS-Signalausfällen aufrechtzuerhalten. Es liefert Echtzeit-Updates über die Position, Geschwindigkeit und Richtung des selbstfahrenden Autos.
- LiDAR (Light Detection and Ranging): Verwendung von Laserstrahlen zur Erstellung einer detaillierten 3D-Karte der Fahrzeugumgebung. Diese Technologie hilft dem Auto, Objekte in seiner Umgebung zu erkennen und zu messen, einschließlich anderer Fahrzeuge, Fußgänger und Verkehrsschilder.
- Radar (Radio Detection and Ranging): Verwendung von Funkwellen zur Erfassung von Geschwindigkeit, Entfernung und Richtung von Objekten. Radar ist besonders nützlich bei widrigen Wetterbedingungen und zur Erfassung von Objekten über größere Entfernungen.
- Kameras: zur Erfassung visueller Informationen über die Umgebung des Fahrzeugs, einschliesslich Fahrbahnmarkierungen, Verkehrssignale und Strassenschilder. Sie sind unerlässlich für die Interpretation komplexer visueller Hinweise und für Entscheidungen auf der Grundlage visueller Daten.
Was sind die 6 Automatisierungsgrade in Fahrzeugen?
Die 6 Stufen des autonomen Fahrens, die von der Society of Automotive Engineers (SAE) in ihrer Norm J3016 definiert werden, beschreiben die Automatisierungsgrade in Fahrzeugen. Hier ist eine Aufschlüsselung:
- Stufe 0: keine Automatisierung. Warnungen oder kurzzeitige Unterstützung, wie z. B. automatische Notbremsung oder Warnungen vor toten Winkeln, aber keine nachhaltige Automatisierung.
- Stufe 1: Fahrerassistenz. Einzelnes automatisiertes System zur Unterstützung, wie z. B. adaptive Geschwindigkeitsregelung (Aufrechterhaltung von Geschwindigkeit und Abstand) oder Spurhalteassistent.
- Stufe 2: Teilautomatisierung. Kombination von Systemen, wie z. B. Lenkung und Beschleunigung/Verzögerung, aber keine Entscheidungsfindung.
- Stufe 3: bedingte Automatisierung. Das Auto übernimmt die meisten Fahraufgaben unter bestimmten Bedingungen (z. B. Autobahnfahrt). Das System kann die Umgebung überwachen.
- Stufe 4: hohe Automatisierung. Das Auto fährt in vordefinierten Szenarien selbstständig. In diesen Bereichen ist keine Fahreraufmerksamkeit erforderlich.
- Stufe 5: vollständige Automatisierung. Das Fahrzeug kann alle Aufgaben in jeder Umgebung ausführen, die ein menschlicher Fahrer bewältigen könnte. Es sind möglicherweise kein Lenkrad oder Pedale vorhanden.
Diese Stufen veranschaulichen den Übergang von menschlich gesteuerten Fahrzeugen zu vollständig autonomen Systemen, die in der Lage sind, alle Fahraufgaben zu übernehmen.
Akzeptiert das INS Eingaben von externen Hilfssensoren?
Inertiale Navigationssysteme unseres Unternehmens akzeptieren Eingaben von externen Hilfssensoren wie Luftdatensensoren, Magnetometern, Odometern, DVL und anderen.
Diese Integration macht das INS äußerst vielseitig und zuverlässig, insbesondere in GNSS-abgelehnten Umgebungen.
Diese externen Sensoren verbessern die Gesamtleistung und Genauigkeit des INS, indem sie komplementäre Daten liefern.
Was ist der Unterschied zwischen IMU und INS?
Der Unterschied zwischen einer Inertial Measurement Unit (IMU) und einem Inertial Navigation System (INS) liegt in ihrer Funktionalität und Komplexität.
Eine IMU (Inertial Measurement Unit) liefert Rohdaten über die lineare Beschleunigung und Winkelgeschwindigkeit des Fahrzeugs, gemessen durch Beschleunigungsmesser und Gyroskope. Sie liefert Informationen über Rollen, Nicken, Gieren und Bewegung, berechnet aber keine Positions- oder Navigationsdaten. Die IMU wurde speziell entwickelt, um wesentliche Daten über Bewegung und Orientierung zur externen Verarbeitung weiterzuleiten, um Position oder Geschwindigkeit zu bestimmen.
Auf der anderen Seite kombiniert ein INS (Inertial Navigation System) IMU-Daten mit fortschrittlichen Algorithmen, um die Position, Geschwindigkeit und Orientierung eines Fahrzeugs im Laufe der Zeit zu berechnen. Es beinhaltet Navigationsalgorithmen wie Kalman-Filterung für Sensorfusion und -integration. Ein INS liefert Echtzeit-Navigationsdaten, einschliesslich Position, Geschwindigkeit und Orientierung, ohne auf externe Positionierungssysteme wie GNSS angewiesen zu sein.
Dieses Navigationssystem wird typischerweise in Anwendungen eingesetzt, die umfassende Navigationslösungen erfordern, insbesondere in GNSS-verweigerten Umgebungen, wie z. B. militärische UAVs, Schiffe und U-Boote.
Was ist der Unterschied zwischen AHRS und INS?
Der Hauptunterschied zwischen einem Attitude and Heading Reference System (AHRS) und einem Inertial Navigation System (INS) liegt in ihrer Funktionalität und dem Umfang der von ihnen bereitgestellten Daten.
AHRS liefert Orientierungsinformationen, insbesondere die Lage (Nick-, Rollwinkel) und den Kurs (Gierwinkel) eines Fahrzeugs oder Geräts. Es verwendet typischerweise eine Kombination von Sensoren, darunter Gyroskope, Beschleunigungsmesser und Magnetometer, um die Orientierung zu berechnen und zu stabilisieren. Das AHRS gibt die Winkelposition in drei Achsen (Nick-, Roll- und Gierwinkel) aus, wodurch ein System seine Orientierung im Raum verstehen kann. Es wird häufig in der Luftfahrt, bei UAVs, in der Robotik und in Marinesystemen eingesetzt, um genaue Lage- und Kursdaten zu liefern, die für die Fahrzeugsteuerung und -stabilisierung entscheidend sind.
Ein INS liefert nicht nur Orientierungsdaten (wie ein AHRS), sondern verfolgt auch die Position, Geschwindigkeit und Beschleunigung eines Fahrzeugs im Zeitverlauf. Es verwendet Trägheitssensoren, um die Bewegung im 3D-Raum zu schätzen, ohne auf externe Referenzen wie GNSS angewiesen zu sein. Es kombiniert die in AHRS enthaltenen Sensoren (Gyroskope, Beschleunigungsmesser), kann aber auch fortschrittlichere Algorithmen zur Positions- und Geschwindigkeitsverfolgung enthalten und wird oft mit externen Daten wie GNSS für eine höhere Genauigkeit integriert.
Zusammenfassend lässt sich sagen, dass sich AHRS auf die Orientierung (Lage und Kurs) konzentriert, während INS eine vollständige Suite von Navigationsdaten liefert, einschließlich Position, Geschwindigkeit und Orientierung.