Höhere Leistung bei geringer Dynamik
Mobile Kartierungssysteme mit integrierten IMUs liefern Echtzeitdaten und ermöglichen so wichtige Einblicke in die Umweltdynamik.
Diese Systeme ermöglichen die Erstellung von hochauflösenden Karten (HD-Karten) für autonome Fahrzeuge, verbessern die Genauigkeit und reduzieren das Risiko von Datenlücken, wodurch sie für Anwendungen wie Infrastruktur-Kartierung, Straßenvermessungen und Umweltanalysen unerlässlich sind.
Mit fortschrittlicher GNSS- und Trägheitsintegration bieten mobile Kartierungssysteme eine schnelle Einrichtung und Initialisierung, wodurch Ausfallzeiten minimiert und eine schnelle Datenerfassung ermöglicht wird. Dies ist besonders wertvoll in zeitkritischen Szenarien, wie z. B. mobilen Infrastrukturvermessungen oder Notfallkartierungen, bei denen ein schneller Einsatz entscheidend ist.
In Umgebungen mit geringer Dynamik, wie z. B. bei Fahrzeugen, die sich langsam durch städtische Gebiete oder in Innenräumen bewegen, erhalten hochleistungsfähige Trägheitssysteme präzise Positions- und Orientierungsdaten aufrecht. Während herkömmliche GPS-Systeme unter solchen Bedingungen möglicherweise Schwierigkeiten haben, gewährleistet ein mit GNSS integriertes INS kontinuierliche, zuverlässige Daten, selbst in GNSS-abgelehnten Umgebungen.
Durch die Gewährleistung einer konsistenten Leistung erzeugen diese Systeme genaue 3D-Modelle, topografische Karten und Geodatenprodukte, unabhängig von der Bewegungsgeschwindigkeit oder der Komplexität der Umgebung.

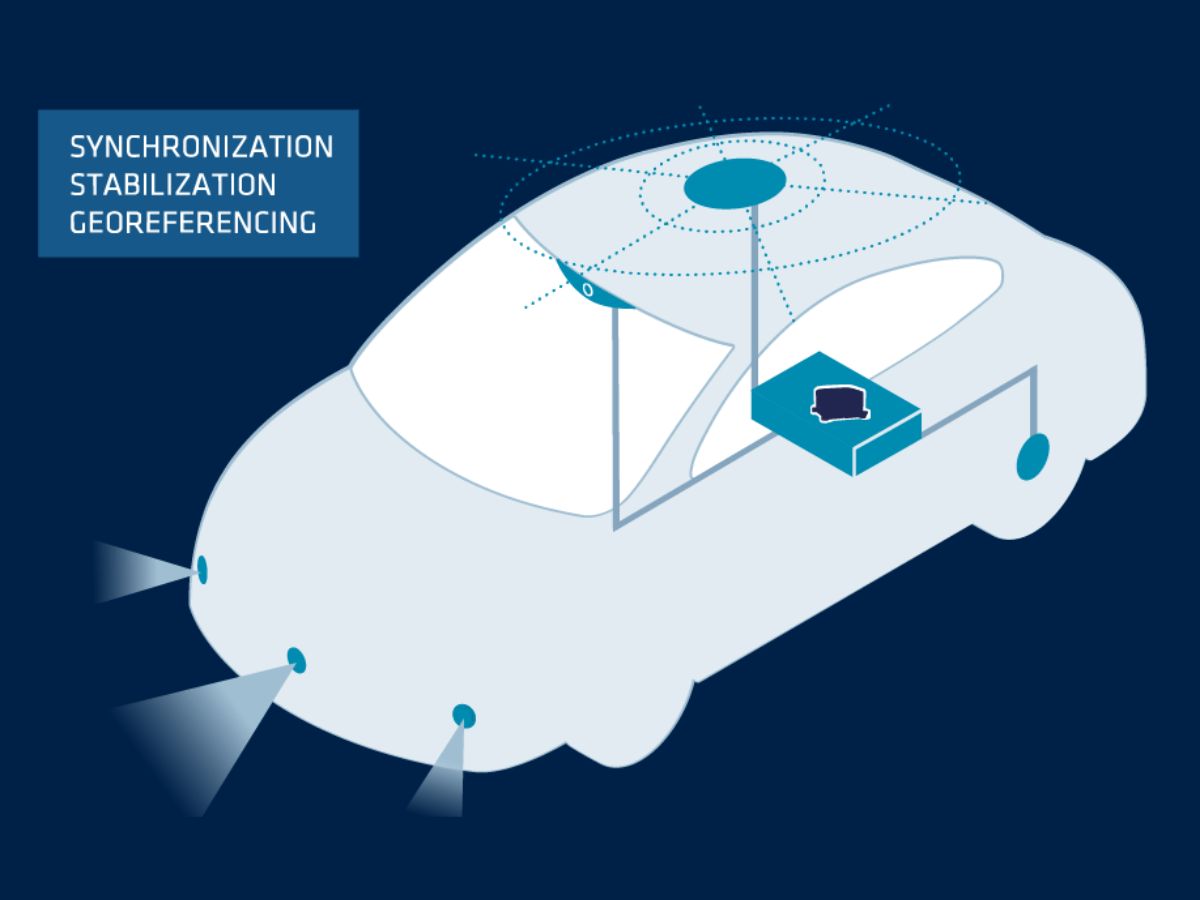
Einzelne Kommunikationsschnittstelle mit integrierter Synchronisierung
Unsere Trägheitssysteme unterstützen einen optimierten Integrationsprozess mit einer einzigen Kommunikationsschnittstelle. Das INS kann als zentrale Drehscheibe für Daten von GNSS- und LiDAR-Sensoren dienen. Durch die Verwendung von Industriestandard-Kommunikationsprotokollen, Ethernet oder CAN-Bus können Sie das INS mit Ihrem GNSS-Empfänger und dem mobilen LiDAR-System verbinden, wodurch die Hardwarekomplexität minimiert und die Notwendigkeit mehrerer Kommunikationsverbindungen vermieden wird.
Unsere INS-Lösungen verfügen über integrierte Synchronisierungsfunktionen, die eine nahtlose Datenfusion zwischen GNSS-, LiDAR- und Trägheitsdaten gewährleisten.
Das INS kann als PTP-Master-Clock dienen und Zeitstempel von allen Sensoren synchronisieren, was für SLAM-Operationen entscheidend ist. Mit Echtzeituhrfunktionen (RTC) und der Fähigkeit, GNSS-Timing- und externe Triggersignale zu verarbeiten, stellt das INS sicher, dass GNSS- und LiDAR-Daten für eine genaue SLAM-Verarbeitung korrekt ausgerichtet sind.
Echtzeit- und Post-Processing-Funktionen
Mobile Mapping Systeme (MMS) bieten sowohl Echtzeit- als auch Post-Processing-Funktionen, die es den Benutzern ermöglichen, sofort auf Daten zuzugreifen und gleichzeitig die Ergebnisse später für eine höhere Genauigkeit zu verfeinern.
Die Echtzeit-Datenerfassung ermöglicht es Ingenieuren oder Vermessern, sofortige Bewertungen vorzunehmen, während die Post-Processing-Software sicherstellt, dass das Endergebnis so genau wie möglich ist. Trägheitssysteme tragen wesentlich zu diesem Prozess bei, indem sie konsistente und zuverlässige Positionsdaten aufrechterhalten, selbst wenn Satellitensignale nicht verfügbar oder beeinträchtigt sind.
Mobile Kartierungsplattformen, die mit Trägheitssystemen ausgestattet sind, bieten Flexibilität bei der Datenerfassung und -analyse. Die Bediener können Parameter im laufenden Betrieb anpassen und so sicherstellen, dass ihre Kartierungsprojekte die erforderlichen Standards für Genauigkeit und Präzision erfüllen.
Zur weiteren Verfeinerung bieten wir Qinertia an, eine leistungsstarke Post-Processing-Software, die die Trajektoriengenauigkeit durch die nachträgliche Verbesserung von GNSS- und INS-Daten verbessert, was SLAM-basierte Kartierungs-Workflows ergänzen kann.

Unsere Lösungen für mobile Kartierung
Unsere Trägheitsnavigationssysteme (INS) sind speziell für Vermessungsmärkte konzipiert und bieten hohe Leistung und Benutzerfreundlichkeit. Sie basieren auf fortschrittlichen Trägheitssensoren und integrieren modernste Algorithmen und GNSS-Technologie, um präzise Navigations- und Positionierungsdaten zu liefern. Unsere Systeme sind hochgradig anpassbar und verfügen über konfigurierbare Komponenten, um spezifische Anwendungsanforderungen zu erfüllen.

Ekinox-D

Apogee-D

Navsight Land-Air
Broschüre zu Mapping-Anwendungen
Erhalten Sie unsere Broschüre direkt in Ihren Posteingang!
Fallstudien
SBG Systems arbeitet mit führenden Unternehmen verschiedener Branchen zusammen, um hochleistungsfähige Inertiallösungen für das mobile Mapping anzubieten. Unsere Fallstudien zeigen die Erfolgsgeschichten von Projekten, bei denen unsere Technologie eine entscheidende Rolle bei der Datenerfassung und -analyse spielte.



Sie reden über uns
Hören Sie aus erster Hand von den Innovatoren und Kunden, die unsere Technologie übernommen haben.
Ihre Erfahrungsberichte und Erfolgsgeschichten verdeutlichen den bedeutenden Einfluss unserer Sensoren in praktischen Anwendungen für autonome Fahrzeuge.
Entdecken Sie weitere Vermessungsanwendungen
SBG Systems bietet hochleistungsfähige Inertialnavigationssysteme und Bewegungssensoren, die eine entscheidende Rolle bei der Land-, See- und Luftvermessung spielen. Von Baggerarbeiten und Hafenmapping über Indoor-Mapping bis hin zur UAV-Photogrammetrie unterstützen unsere Inertiallösungen Geodatenexperten bei der Erfassung präziser Positions-, Orientierungs- und Bewegungsdaten in allen Arten von Umgebungen.
Entdecken Sie unsere Vermessungsanwendungen.
Haben Sie Fragen?
Unser FAQ-Bereich behandelt die häufigsten Fragen zu mobilen Mapping-Systemen, einschließlich Informationen zu den beteiligten Technologien, Best Practices und zur Integration unserer Produkte in Ihre Lösungen.
Was ist SLAM?
SLAM, was für Simultaneous Localization and Mapping steht, ist eine Rechentechnik, die in der Robotik und Computer Vision verwendet wird, um eine Karte einer unbekannten Umgebung zu erstellen und gleichzeitig den Standort eines Agenten innerhalb dieser Umgebung zu verfolgen. Dies ist besonders nützlich in Szenarien, in denen GNSS nicht verfügbar ist, z. B. in Innenräumen oder in dichten städtischen Gebieten.
SLAM-Systeme bestimmen die Position und Orientierung des Agenten in Echtzeit. Dies beinhaltet die Verfolgung der Bewegung des Roboters oder Geräts, während er sich durch die Umgebung bewegt. Während sich der Agent bewegt, erstellt das SLAM-System eine Karte der Umgebung. Dies kann eine 2D- oder 3D-Darstellung sein, die das Layout, Hindernisse und Merkmale der Umgebung erfasst.
Diese Systeme verwenden oft mehrere Sensoren, wie z. B. Kameras, LiDAR oder Inertial Measurement Units (IMUs), um Daten über die Umgebung zu sammeln. Diese Daten werden kombiniert, um die Genauigkeit sowohl der Lokalisierung als auch der Kartierung zu verbessern.
SLAM-Algorithmen verarbeiten die eingehenden Daten, um die Karte und den Standort des Agenten kontinuierlich zu aktualisieren. Dies beinhaltet komplexe mathematische Berechnungen, einschließlich Filter- und Optimierungstechniken.
Was ist Real Time Kinematic?
Real-Time Kinematic (RTK) ist eine präzise Satellitennavigationstechnik, die zur Verbesserung der Genauigkeit von Positionsdaten verwendet wird, die aus Global Navigation Satellite System (GNSS)-Messungen abgeleitet werden. Sie wird häufig in Anwendungen wie Vermessung, Landwirtschaft und autonomer Fahrzeugnavigation eingesetzt.
Durch die Verwendung einer Basisstation, die GNSS-Signale empfängt und ihre Position mit hoher Genauigkeit berechnet. Anschließend werden Korrekturdaten in Echtzeit an einen oder mehrere bewegliche Empfänger (Rover) übertragen. Die Rover verwenden diese Daten, um ihre GNSS-Messwerte anzupassen und ihre Positionsgenauigkeit zu verbessern.
RTK bietet eine Genauigkeit im Zentimeterbereich, indem es GNSS-Signale in Echtzeit korrigiert. Dies ist deutlich genauer als die Standard-GNSS-Positionierung, die typischerweise eine Genauigkeit von wenigen Metern bietet.
Die Korrekturdaten von der Basisstation werden über verschiedene Kommunikationsmethoden, wie z. B. Funk, Mobilfunknetze oder das Internet, an die Rover gesendet. Diese Echtzeitkommunikation ist entscheidend für die Aufrechterhaltung der Genauigkeit bei dynamischen Einsätzen.
Was ist Precise Point Positioning?
Precise Point Positioning (PPP) ist eine Satellitennavigationstechnik, die eine hochpräzise Positionierung durch Korrektur von Satellitensignalfehlern bietet. Im Gegensatz zu traditionellen GNSS-Methoden, die oft auf bodengestützten Referenzstationen basieren (wie bei RTK), verwendet PPP globale Satellitendaten und fortschrittliche Algorithmen, um genaue Standortinformationen zu liefern.
PPP funktioniert überall auf der Welt, ohne dass lokale Referenzstationen erforderlich sind. Dies macht es geeignet für Anwendungen in abgelegenen oder anspruchsvollen Umgebungen, in denen es an Bodeninfrastruktur mangelt. Durch die Verwendung präziser Satellitenorbit- und Zeitdaten sowie Korrekturen für atmosphärische und Mehrwegeffekte minimiert PPP gängige GNSS-Fehler und kann eine Genauigkeit im Zentimeterbereich erreichen.
Während PPP für die Post-Processing-Positionierung verwendet werden kann, bei der gesammelte Daten im Nachhinein analysiert werden, kann es auch Echtzeit-Positionierungslösungen bereitstellen. Echtzeit-PPP (RTPPP) ist zunehmend verfügbar, sodass Benutzer Korrekturen empfangen und ihre Position in Echtzeit bestimmen können.
Was ist eine Echtzeituhr?
Eine Echtzeituhr (Real Time Clock, RTC) ist ein elektronisches Gerät, das die aktuelle Uhrzeit und das Datum auch im ausgeschalteten Zustand erfasst. RTCs werden häufig in Anwendungen eingesetzt, die eine präzise Zeitmessung erfordern, und erfüllen mehrere Schlüsselfunktionen.
Erstens führen sie eine genaue Zählung von Sekunden, Minuten, Stunden, Tagen, Monaten und Jahren durch und berücksichtigen dabei häufig Schaltjahr- und Wochentagsberechnungen für langfristige Präzision. RTCs arbeiten mit geringem Stromverbrauch und können mit einer Batterie-Backup betrieben werden, wodurch sie auch bei Ausfällen die Zeit weiter erfassen können. Sie liefern auch Zeitstempel für Dateneinträge und Protokolle und gewährleisten so eine genaue Dokumentation.
Zusätzlich können RTCs planmäßige Operationen auslösen, wodurch Systeme aus Low-Power-Zuständen aufwachen oder Aufgaben zu bestimmten Zeiten ausführen können. Sie spielen eine entscheidende Rolle bei der Synchronisierung mehrerer Geräte (z. B. GNSS/INS), um deren reibungsloses Zusammenspiel zu gewährleisten.
RTCs sind integraler Bestandteil verschiedener Geräte, von Computern und Industrieanlagen bis hin zu IoT-Geräten. Sie verbessern die Funktionalität und gewährleisten ein zuverlässiges Zeitmanagement in einer Vielzahl von Anwendungen.