
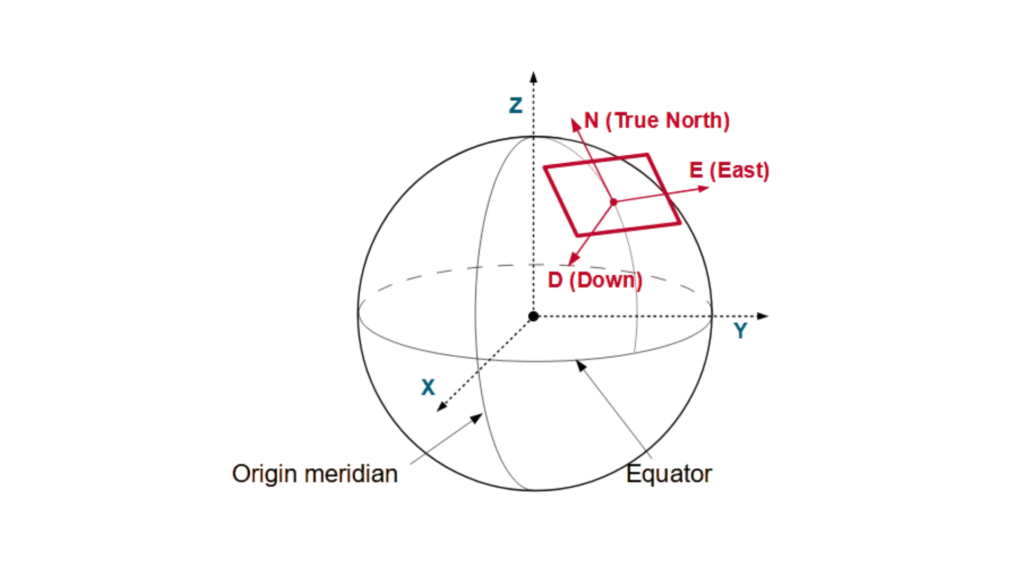
Le repère NED (Nord-Est-Bas) est un système de référence largement utilisé pour la navigation et les mesures inertielles.
Le repère Nord-Est-Bas (NED) sert de repère local, défini par ses coordonnées ECEF. Généralement, il reste fixe par rapport au véhicule ou à la plateforme et se déplace avec le repère du corps. Ce repère positionne les axes Nord et Est dans un plan tangent à la surface de la Terre à son emplacement actuel, en se basant sur le modèle ellipsoïdal WGS84.
Il se compose de trois axes orthogonaux : l'axe Nord pointe vers le Nord géographique, l'axe Bas s'étend vers l'intérieur de la Terre (opposé à la direction Haut locale) et l'axe Est complète le système droit en pointant vers l'est (perpendiculaire au Nord).
De même, un véhicule ou une plateforme peut avoir le repère Est-Nord-Haut (ENU) localement attaché, se déplaçant avec le système. Contrairement au repère NED, le repère ENU oriente ses axes différemment : l'axe Nord pointe toujours vers le Nord géographique, mais l'axe Haut s'étend à l'opposé de l'intérieur de la Terre, tandis que l'axe Est maintient son alignement de système droit en pointant vers l'est.
Ce système de coordonnées droit simplifie les calculs pour les aéronefs, les navires et les véhicules autonomes en s'alignant sur les directions de mouvement naturelles.
Les applications NED utilisent
Un drone s'appuie sur un système de pilote automatique pour calculer sa trajectoire dans le cadre de coordonnées NED. Lorsque le drone est en vol vers le nord, sa position augmente dans la direction du Nord. Inversement, lorsque le drone monte, sa valeur de coordonnée Bas diminue, étant donné que Bas est positif vers le bas.
Inversement, un INS (Inertial Navigation System) de navire fonctionne en suivant son mouvement par rapport au repère NED. Lorsque le navire se déplace vers l'est, sa coordonnée Est augmente. Inversement, lorsque le navire plonge, sa coordonnée Bas augmente.
Une voiture autonome utilise le repère NED pour déterminer sa position. La coordonnée Nord du véhicule augmente lorsqu'il se déplace vers le nord, tandis que les bosses ou les creux du terrain entraînent des changements dans la valeur Bas.
Les munitions guidées avec précision s'appuient sur le repère NED pour ajuster leur trajectoire. Lorsqu'un missile descend vers sa cible, la coordonnée Bas augmente, assurant un ciblage précis.
Les AUV (Autonomous Underwater Vehicles) utilisent le repère NED pour naviguer. Lorsqu'un AUV se déplace dans une direction nord-est, les coordonnées Nord et Est augmentent, tandis que les changements de profondeur affectent la coordonnée Bas.
Le système NED a été développé pour aligner les mouvements avec l'orientation naturelle de la Terre, simplifiant ainsi la navigation. Ce système est utilisé par les ingénieurs, les pilotes et les scientifiques pour améliorer la précision dans les applications de positionnement, de guidage et de contrôle.