
Le repère de coordonnées du capteur ou repère corps est un repère de référence local qui se déplace avec un capteur ou une plateforme, tel qu'un drone, un véhicule, un robot ou un missile. Il définit l'orientation et le mouvement par rapport à la structure physique du capteur. Les ingénieurs utilisent le repère corps pour exprimer les mesures telles que l'accélération, la vitesse angulaire et la vitesse directement du point de vue du capteur.
Le repère (du corps) du capteur—souvent appelé repère du corps ou repère du véhicule—sert de repère fixe à une plateforme mobile, telle qu'un drone, une voiture, un missile ou un véhicule sous-marin. Les ingénieurs utilisent ce repère pour décrire le mouvement et l'orientation de la plateforme par rapport à elle-même, ce qui le rend essentiel pour la navigation, le contrôle et la fusion de capteurs.
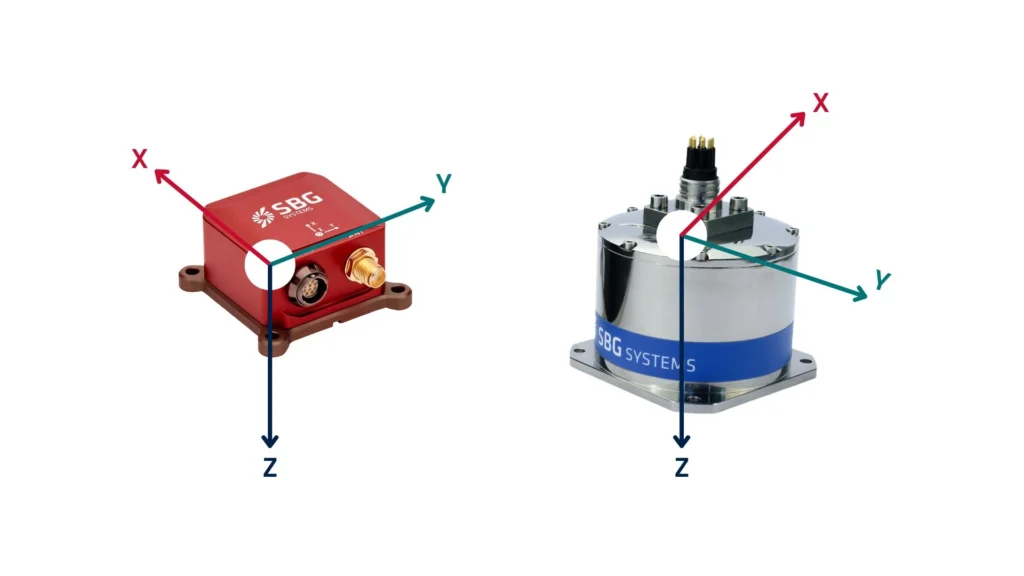
Dans la plupart des applications, les utilisateurs montent des capteurs tels que des IMU, des récepteurs GNSS ou des unités AHRS directement sur le véhicule. Ces capteurs rapportent des données dans leur propre repère, qui coïncide généralement avec le repère du corps. Il se compose de trois axes orthogonaux formant un système de coordonnées à droite:
- L'axe X pointe vers l'avant, dans la direction du mouvement ou du nez du capteur.
- L'axe Y pointe vers la droite (tribord pour les systèmes marins ou aériens).
- L'axe Z pointe vers le bas ou vers le bas par rapport à la base du capteur, selon l'application.
Cette orientation fixe permet au système de mesurer comment il se déplace ou pivote dans son propre espace, plutôt que par rapport à la Terre.
Exemples d'applications de cadre de carrosserie
L'IMU d'un drone est chargée de mesurer l'accélération et la rotation dans son propre référentiel. Lorsque le drone pique vers l'avant, il détecte une vitesse angulaire autour de son axe Y. Le système transmet ces données au contrôleur de vol, ce qui permet au drone de se stabiliser et d'exécuter les commandes de vol avec précision. Par exemple, le système de pilote automatique du drone utilise les données des capteurs dans le repère du corps pour stabiliser le vol et exécuter des manœuvres telles que le lacet, le tangage et le roulis. Le système interprète directement les mouvements, en les exprimant comme des mouvements vers l'avant, latéraux et verticaux par rapport au propre repère du drone.
Une voiture autonome, quant à elle, détecte son accélération linéaire le long des axes X (avant), Y (latéral) et Z (vertical) dans son repère. Cette capacité permet au véhicule d'ajuster sa vitesse, de maintenir le contrôle de la voie et de réagir aux changements de terrain. Ce repère facilite l'interprétation des données lidar, radar et inertielles. Le système de contrôle de la voiture utilise ces relevés pour prendre des décisions de conduite en temps réel en fonction de sa propre orientation.
Le système de navigation d'un missile utilise le repère du corps pour le suivi de l'orientation. Lorsqu'il manœuvre, le capteur embarqué détecte les vitesses de rotation et l'accélération dans les axes fixés au corps, ce qui permet des corrections de trajectoire précises. Le système de navigation embarqué du missile utilise le repère du corps pour suivre l'accélération et la vitesse angulaire, ce qui lui permet d'ajuster sa trajectoire et son orientation en fonction de sa position actuelle et de l'orientation du repère.
Un bras robotique utilise un repère pour calculer les mouvements des articulations et les positions de l'effecteur terminal. La position et l'orientation de chaque moteur sont mesurées dans ce repère local afin de garantir un contrôle en temps réel.
Défis liés à l'alignement des capteurs
Dans les applications pratiques, les capteurs ne sont pas toujours parfaitement alignés avec le châssis. Pour résoudre ce problème, les ingénieurs mettent fréquemment en œuvre des corrections de rotation de châssis, qui alignent le système de coordonnées du capteur avec le châssis du véhicule. Cela garantit des relevés précis pour les calculs liés à la position, à la vitesse et à l'orientation. C'est fondamental pour tout système qui se déplace et détecte son environnement. Il joue un rôle essentiel dans la navigation, le contrôle et la stabilisation en temps réel, ce qui le rend essentiel dans les systèmes aérospatiaux, de défense, automobiles et robotiques.
Parlez-nous de votre projet