Le PPK (Post-Processing Kinematic) est une méthode de traitement des données GNSS qui permet d'obtenir un positionnement de haute précision en corrigeant les erreurs dans les données de positionnement brutes. Le post-traitement est largement utilisé dans les applications qui nécessitent des informations géospatiales précises, telles que les levés topographiques, la cartographie et les opérations UAV.
SBG Systems a développé une solution interne de post-traitement GNSS pour améliorer les performances de ses systèmes de navigation inertielle.
Qu'est-ce que le post-traitement GNSS ?
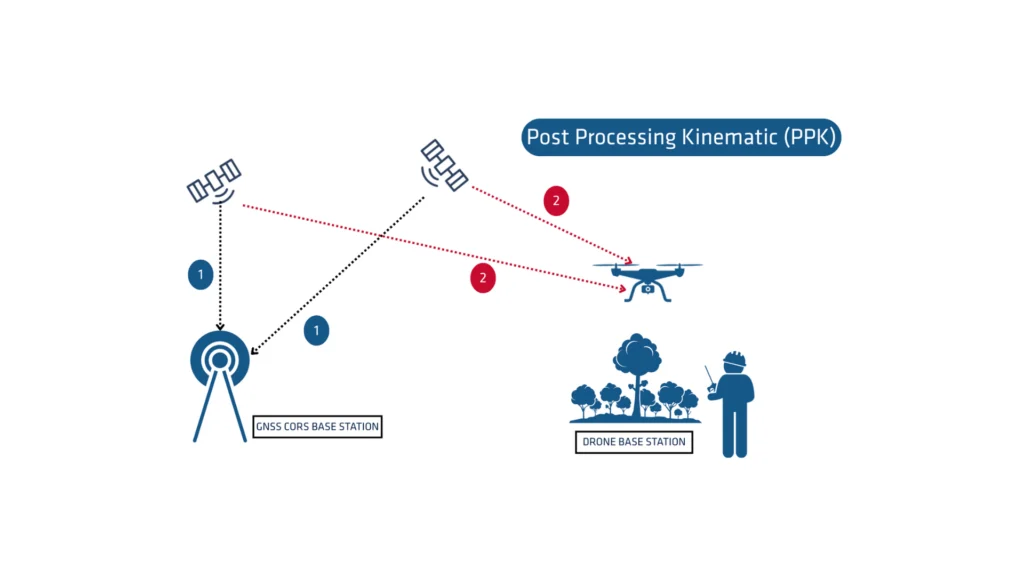
Le post-traitement PPK est une approche où le système traite les mesures de données GNSS brutes enregistrées sur un récepteur GNSS après l'acquisition des données. Vous pouvez les combiner avec d'autres sources de mesures GNSS pour fournir la trajectoire cinématique la plus complète et la plus précise pour le récepteur GNSS, même dans les environnements les plus difficiles.
Ces autres sources peuvent être une station de base GNSS locale située sur ou à proximité du projet d'acquisition de données, ou des stations de référence à fonctionnement continu (CORS) existantes, généralement proposées par des agences gouvernementales et/ou des fournisseurs de réseaux CORS commerciaux.
Un logiciel Post-processing Kinematic (PPK) peut utiliser les informations librement disponibles sur l'orbite et l'horloge des satellites GNSS pour améliorer encore la précision. Le PPK permet de déterminer avec précision l'emplacement d'une station de base GNSS locale dans un référentiel de coordonnées global absolu, qu'il utilise.
Le logiciel PPK peut également prendre en charge des transformations complexes entre différents référentiels de coordonnées pour les projets d'ingénierie.
En d'autres termes, il donne accès à des corrections, améliore la précision du projet et peut même réparer les pertes de données ou les erreurs survenues pendant le levé ou l'installation après la mission.
RTK vs PPK
Le Real-Time Kinematic (RTK) est une technique de positionnement qui transmet les corrections GNSS en temps quasi réel, généralement en utilisant un flux de corrections au format RTCM. Cependant, il peut être difficile de garantir les corrections GNSS, en particulier leur exhaustivité, leur disponibilité, leur couverture et leur compatibilité.
Le PPK offre l'avantage majeur d'optimiser les activités de traitement des données pendant le post-traitement, y compris le traitement avant et arrière. En revanche, le traitement en temps réel peut souffrir d'interruptions ou d'incompatibilités dans les corrections et leur transmission, ce qui entraîne un positionnement moins précis.
Un premier avantage clé du post-traitement GNSS PPK par rapport au temps réel (RTK) est que le système utilisé sur le terrain n'a pas besoin d'avoir une liaison de données/radio pour alimenter les corrections RTCM provenant du CORS dans le système INS/GNSS.
La principale limite à l'adoption du post-traitement est l'exigence de l'application finale d'agir sur l'environnement. D'autre part, si votre application peut supporter le temps de traitement supplémentaire nécessaire pour produire une trajectoire optimisée, elle améliorera considérablement la qualité des données pour tous vos livrables.
Comment le traitement aller-retour améliore-t-il la précision des données ?
Imaginons que nous ayons une coupure GNSS de 60 secondes au milieu de notre levé. L'erreur de position dans le traitement avant augmente rapidement (le taux dépend des spécifications de l'IMU et d'autres paramètres) et atteint son maximum à la fin de la coupure. Elle se rétablit ensuite rapidement.
En post-traitement, nous faisons comme si le temps s'écoulait à l'envers et nous effectuons le traitement dans l'ordre anti-chronologique, car les équations physiques restent valables. Dans ce traitement à rebours, l'erreur serait maximale au début de la coupure GNSS, d'une manière très symétrique par rapport au traitement naturel vers l'avant.
La fusion de ces deux résultats de calcul donne une erreur maximale au milieu de la coupure, avec une magnitude bien inférieure à celle des solutions avant uniquement ou arrière uniquement. Cela améliorera particulièrement les solutions GNSS+INS permises par les produits SBG Systems, mais le traitement GNSS seul bénéficiera également de ce flux de travail.
Comme indiqué précédemment, le post-traitement est le seul moyen d'obtenir cette amélioration, car vous avez besoin de toutes les données du début à la fin, ce qui retarde son utilisation jusqu'à la fin du levé.
Accessible à toutes les applications topographiques
Le RTK est largement utilisé pour le positionnement GNSS de haute précision dans la cartographie, le contrôle de la construction et les applications marines nécessitant des résultats en temps réel. Le post-traitement des données INS est avantageux pour les applications UAV et USV où la mise en œuvre de la radio et la surveillance du flux de corrections RTCM sont difficiles.
Les géomètres aéroportés ont tendance à utiliser le PPK, car les liaisons de données vers les avions sont difficiles à réaliser, car le réseau cellulaire fonctionne mal en altitude en raison de l'orientation des antennes de diffusion au sol.
Les autres applications nécessitant le Post processing Kinematic sont celles où les données (images ou données LiDAR, par exemple) sont traitées dans un flux de travail ultérieur, souvent dans le cloud, et où le traitement de la trajectoire avec un logiciel de post-traitement GNSS comme Qinertia peut facilement être ajouté.