
La navigation aérienne fait référence aux techniques et technologies utilisées pour déterminer la position et la trajectoire d'un aéronef pendant le vol. Une navigation efficace garantit qu'un aéronef atteint sa destination en toute sécurité et efficacité. Voici quelques éléments et méthodes clés impliqués dans la navigation aérienne : Systèmes de navigation inertielle (INS), Systèmes mondiaux de navigation par satellite (GNSS), etc. Nous avons préparé un test en vol complet pour vous.
Il existe une culture de l'innovation chez SBG Systems. Ainsi, lorsque l'idée d'un vol intense pour évaluer les performances de nos Ellipse et Quanta Micro dans des conditions réelles a été formulée, il n'y a pas eu d'hésitation. Il a fallu du temps et des ressources pour que ces tests aient lieu, mais le résultat en valait la peine. Un grand merci à Apache aviation pour son aide dans ce projet.
Les systèmes de navigation inertielle (INS) jouent un rôle crucial en fournissant des informations de positionnement et de navigation précises pour les applications de navigation aérienne. Nous les avons testés dans des conditions réelles afin d'évaluer leur fiabilité.

Une campagne d'essais exceptionnelle en navigation aéroportée
Outre la mise en œuvre complexe impliquée dans la réalisation d'essais aérospatiaux (réglementations, espaces restreints, etc.), ces essais sont particulièrement exceptionnels car ils nous ont donné des réponses à certaines questions que peu de fabricants d'INS ont eu l'occasion de tester dans des conditions réelles :
- Notre objectif initial était d'enrichir notre base de données de tests, en mettant l'accent sur l'amélioration continue de nos algorithmes. De nombreux tests sont généralement effectués dans un environnement “2D” (par exemple, voitures, bateaux), tandis que les tests “3D” sont relativement rares.
- Les clients ayant des applications aérospatiales fournissent rarement des données, car elles sont souvent confidentielles.
- Une autre question que nous avons cherché à aborder était la validation de la robustesse de nos algorithmes dans des conditions dynamiques extrêmes, y compris des vibrations importantes et des accélérations dépassant 4g.
- De plus, cela nous a permis d'évaluer les performances de nos équipements dans des environnements GNSS difficiles, où il existe des blocages de signaux importants en raison de changements brusques d'orientation ou même d'inversions complètes de l'aéronef (vol à l'envers).
Effet de blocage de cardan
Ces vols nous ont également permis de tester toutes les orientations possibles, dont certaines induisent un effet de "blocage de cardan" qui pose traditionnellement des difficultés à certains algorithmes de navigation lorsque le tangage approche les 90°. Bien que nos algorithmes soient conçus pour gérer ce problème à l'aide de quaternions, ils sont rarement mis à l'épreuve dans de telles conditions.
Enfin, outre les aspects de robustesse et de fonctionnalité, nous avons cherché à vérifier si les performances de navigation pouvaient être maintenues dans ces conditions extrêmes.
Il est important de noter que ces tests ont été effectués à l'aveugle.
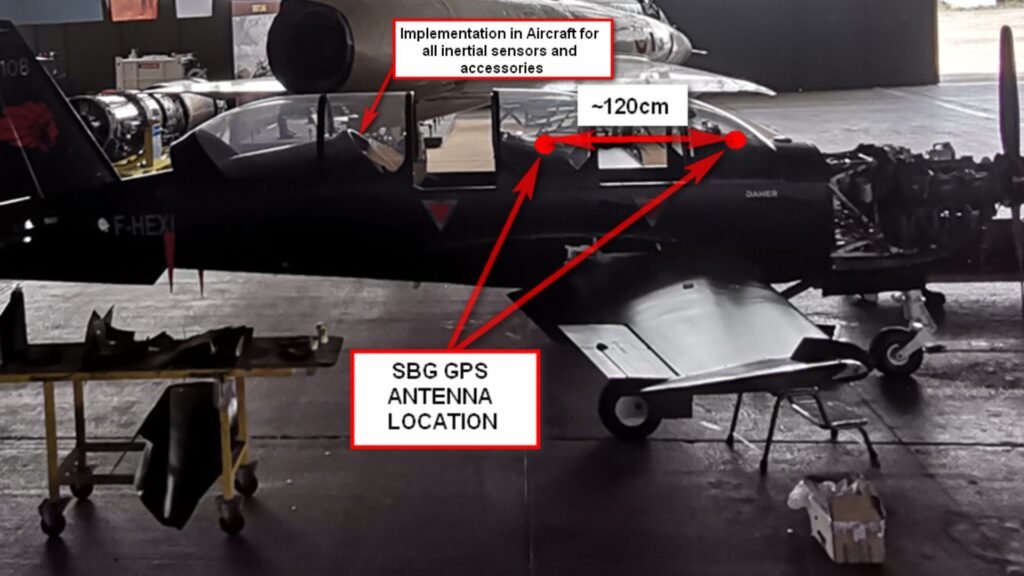
Pour des raisons de sécurité, il est difficile, voire impossible, d'emporter un ordinateur portable à bord. Avec tous les capteurs impliqués, tout devait être configuré et vérifié avant de commencer les essais en vol.
La plateforme de test devait être totalement autonome pour l'enregistrement des données, et une batterie de capacité suffisante était nécessaire pour toute la durée des préparatifs et des vols. Tout cela devait être intégré dans des dimensions très réduites.
Configuration et plan de vol
Afin d'évaluer de manière exhaustive les performances des dispositifs INS, deux vols ont été programmés, chacun représentant différents scénarios rencontrés lors des opérations de navigation aérienne :
- Un vol typique, avec des manœuvres dynamiques plus faibles et des conditions de vol rectilignes et nivelées
- Un vol de voltige, pour stimuler les appareils dans de nombreuses orientations et accélérations
- Cela nous a permis de vérifier que, dans des conditions normales et difficiles, les produits offrent le niveau de performance en temps réel spécifié.

Deux produits ont été testés : Ellipse-D et Quanta Micro. Un Apogee-D post-traité (PPK couplé de manière rigoureuse avec traitement avant + arrière) a servi de référence pour cette évaluation. Et ils ont tous très bien réussi, bien mieux que l'équipe de SBG Systems en fait.
Vol 1 : profil de vol typique
L'objectif principal du vol 1 est d'évaluer les performances des appareils dans un profil de vol typique, englobant des manœuvres dynamiques plus faibles et des conditions de vol en palier.
Ce vol fournit une base de référence pour la comparaison et évalue la précision et la stabilité des dispositifs INS pendant les opérations de vol régulières.
Les données collectées pendant ce vol ont permis d'établir une référence pour évaluer leurs performances dans des conditions plus difficiles de navigation aérienne.
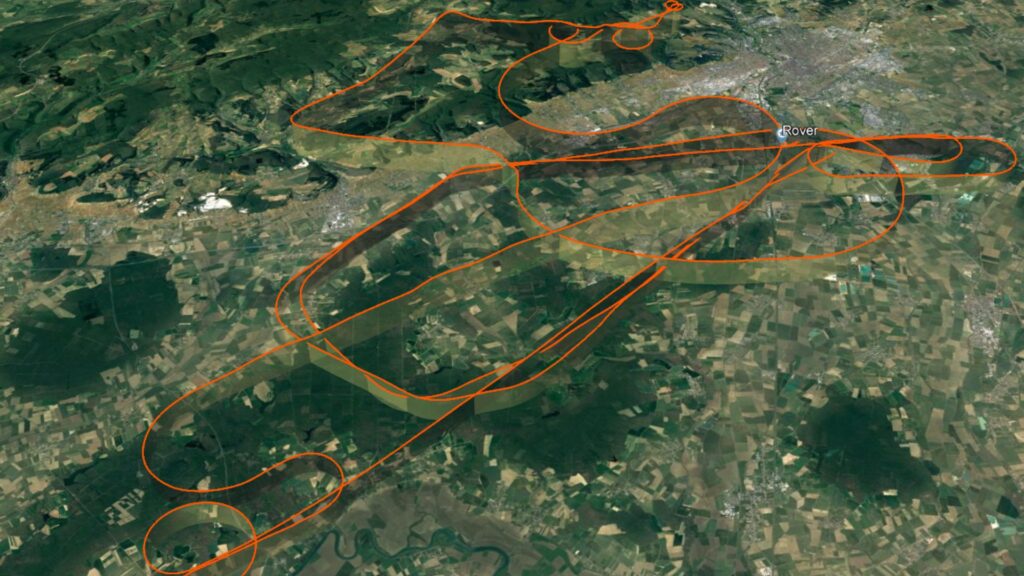
Le plan de vol se compose d'une série de figures telles que la montée, les virages standard et serrés, le virage peu incliné, le phugoïde, les accélérations et les décélérations, le cabré et le piqué, etc.
Vol 2 : manœuvres acrobatiques
Lors du vol 2, les dispositifs INS sont soumis à une série de manœuvres acrobatiques afin de tester leur capacité dans des orientations et des accélérations extrêmes. Les manœuvres acrobatiques, caractérisées par des mouvements rapides et agressifs, introduisent des défis importants pour les systèmes de navigation dans la navigation aérienne.
En simulant ces conditions exigeantes, nous pouvons évaluer la robustesse et la précision des dispositifs INS dans des scénarios réels où un positionnement précis est essentiel.

Le plan de vol se compose d'une série de figures telles que la montée, les virages standard et serrés, le virage peu incliné, le phugoïde, le roulis aux ailerons, le tonneau, le tonneau à 4 points, l'immelmann, le virage en S, les accélérations et les décélérations, le cabré et le piqué, etc.
Appareils testés
Les deux dispositifs INS choisis pour l'évaluation sont Ellipse-D et Quanta Micro. Ekinox Micro est également évalué par procuration avec Quanta Micro.
| Unité | Code matériel | Révision du matériel | Numéro de série | Micrologiciel |
|---|---|---|---|---|
| EUT#1 | ELLIPSE-D-G4A3-B1 | 3.3.00 | 000043763 | 2.5.169-stable |
| EUT#2 | QUANTA-USG | 1.1.0.0 | 000042492 | 4.2.228-beta |
| Évalué par procuration | Ekinox Micro | 0.1 | 000046860 | 5.0.1945-beta |
Bien que le matériel exact d'Ekinox Micro n'ait pas été inclus dans ce test, il s'agit d'une version renforcée de Quanta Micro et se comporte exactement de la même manière. Par conséquent, les résultats de ce test sont entièrement applicables à Ekinox Micro.

Centrale de référence
L'unité Apogee-D avec Qinertia PPK (PPK étroitement couplé avec traitement avant + arrière) sert de référence pour le test.
Résultats des tests
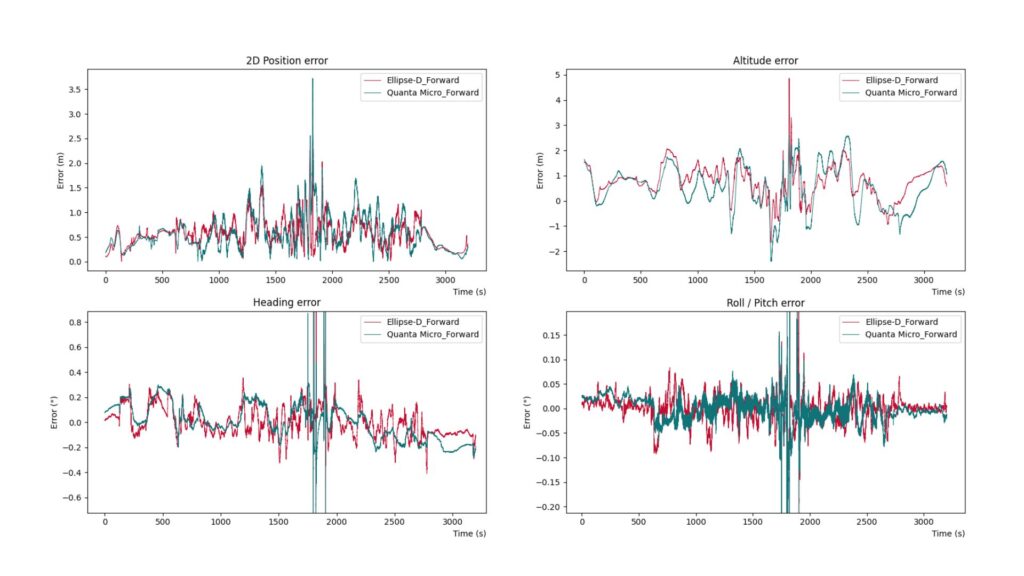
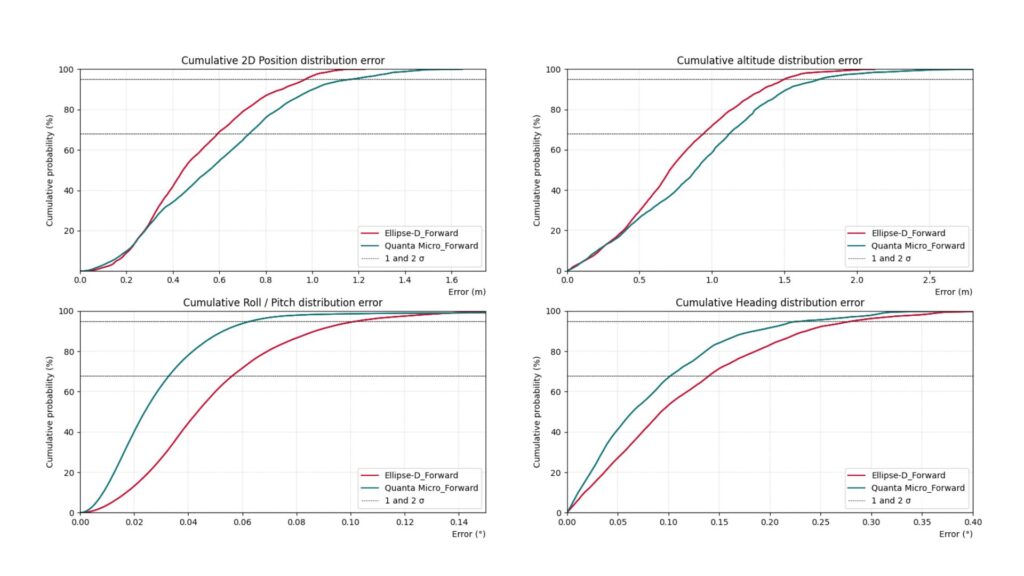
Premier test : vol typique
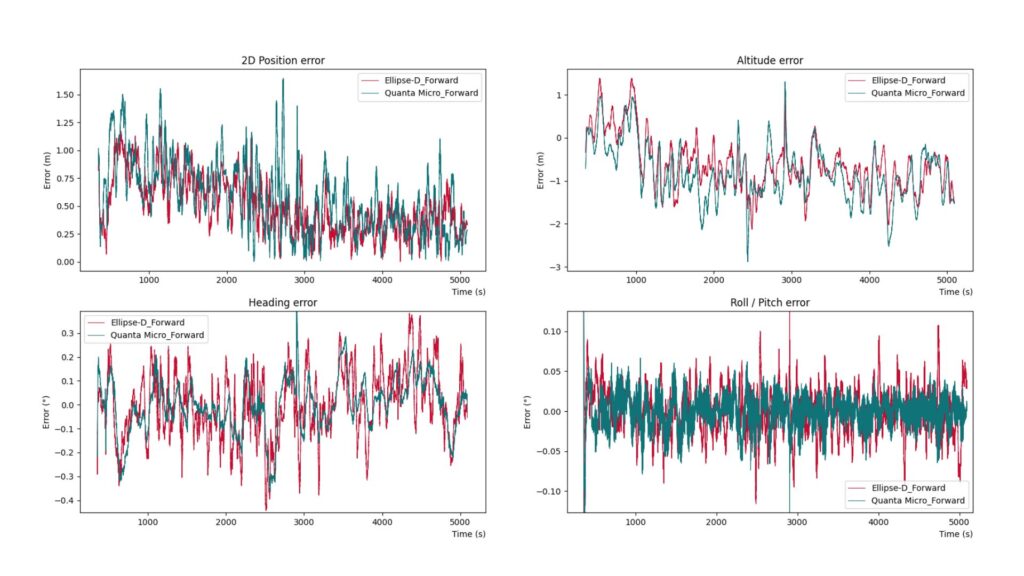
Deuxième test : vol acrobatique
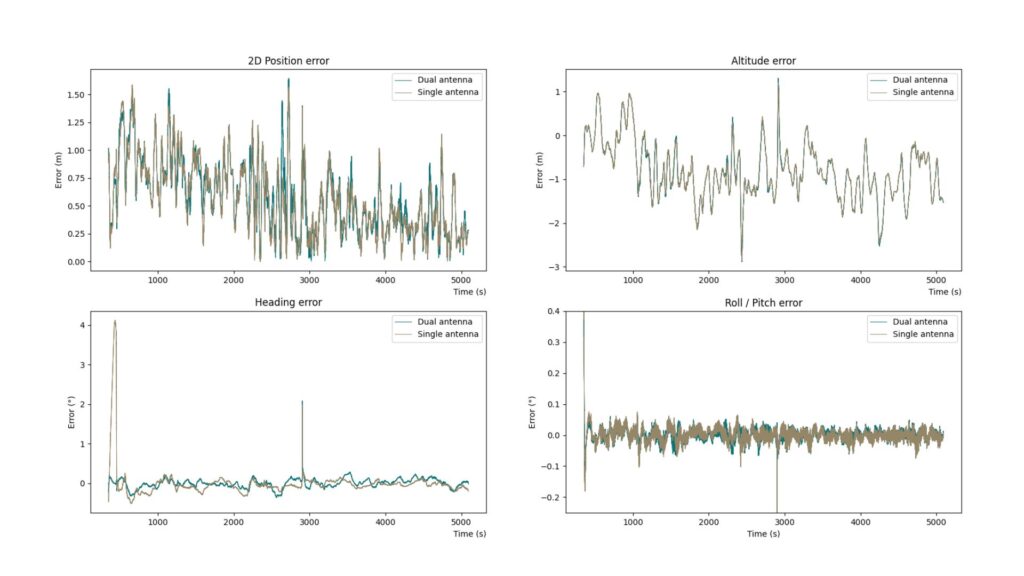
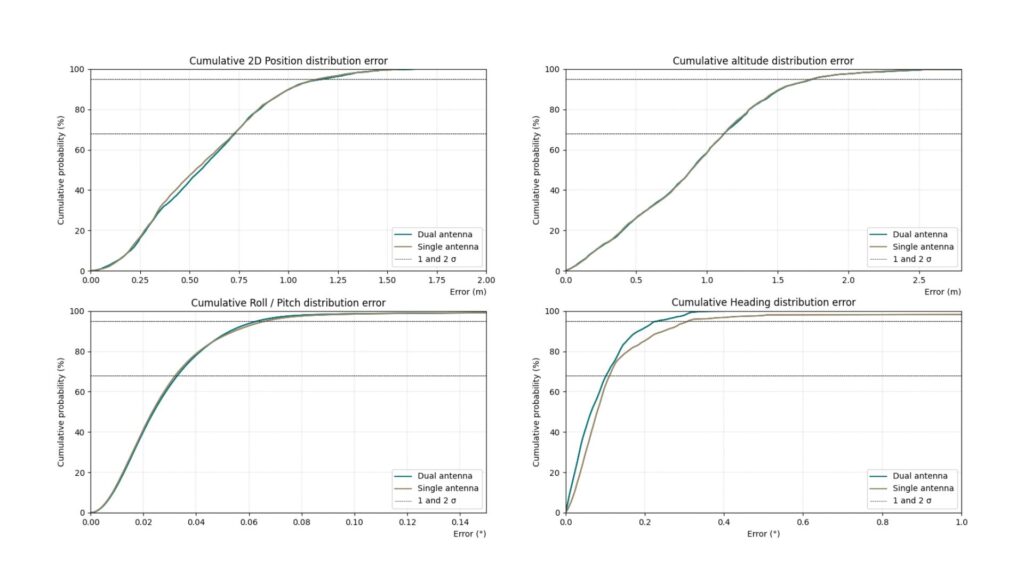
Antenne simple vs double
Le graphique ci-dessous montre les performances en temps réel de Quanta Micro en configuration à antenne unique par rapport à la configuration à deux antennes sous-optimale (avec différents types d'antennes).
Le début du vol est une ligne droite à faible dynamique pendant plus de 7 minutes, sans aucune manœuvre dynamique élevée préalable. Bien que ce soit dans des conditions bien en deçà des conditions optimales, la configuration à antenne unique fonctionne correctement, avec une erreur plus élevée.
Ce type de situation est clairement à l'avantage de la configuration à deux antennes, capable de fournir des mesures précises, même dans des conditions de faible dynamique.
Si cette ligne droite initiale est exclue de l'analyse des erreurs, nous pouvons constater que les performances de l'antenne unique sont équivalentes aux performances de l'antenne double.
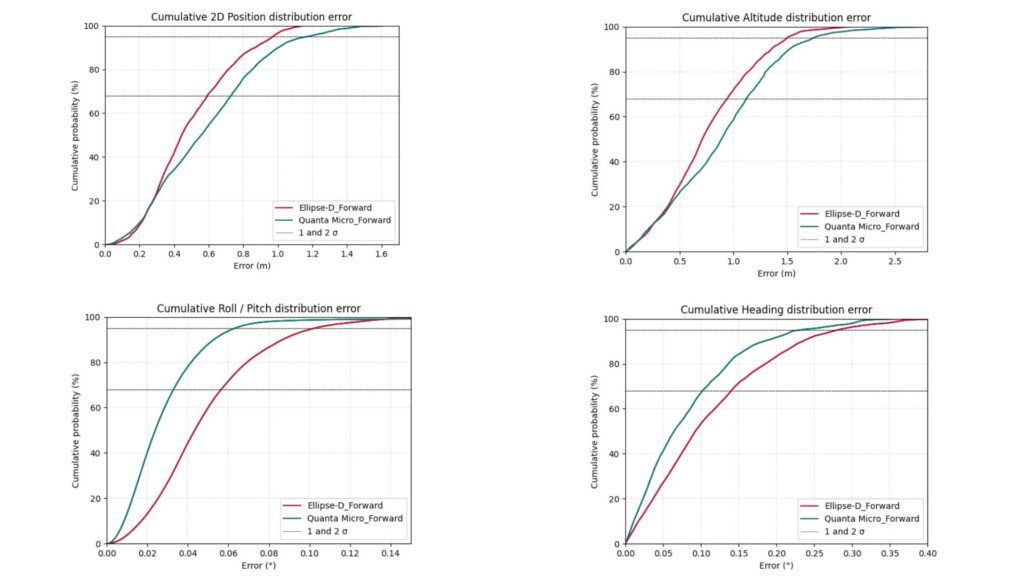
Analyse des résultats
Comparaison des résultats d'Ellipse-D avec les spécifications
| Mesure | Valeur cible (RMS) | Valeur atteinte, vol typique (RMS) | Valeur atteinte, vol acrobatique (RMS) | État, basé sur un vol typique |
|---|---|---|---|---|
| Position horizontale | 1.2 m | 0.574 m | 0.647 m | OK |
| Altitude | 1.5 m | 1.012 m | 1.050 m | OK |
| Roulis | 0.1° | 0.041° | 0.064° | OK |
| Tangage | 0.1° | 0.041° | 0.043° | OK |
| Cap | 0,2° (ligne de base > 2 m) | 0.147° | 0.127° | OK |
Par ailleurs, l'Ellipse-D utilisé lors du test a affiché un niveau de performance exceptionnel, dépassant les attentes.
Bien que toutes nos IMU répondent à leurs performances spécifiées, certaines peuvent même les dépasser. Ellipse-D se distingue comme un exemple de telles performances exceptionnelles, ce qui lui vaut le titre de « Meilleure Ellipse Jamais » et occupe une place spéciale sur notre étagère.
Comparaison des résultats de Quanta Micro / Ekinox Micro avec les spécifications
| Mesure | Valeur cible (RMS) | Valeur atteinte, vol typique (RMS) | Valeur atteinte, vol acrobatique (RMS) | État, basé sur un vol typique |
|---|---|---|---|---|
| Position horizontale | 1.2 m | 0.688 m | 0.689 m | OK |
| Altitude | 1.5 m | 1.204 m | 1.049 m | OK |
| Roulis | 0.03° | 0.023° | 0.049° | OK |
| Tangage | 0.03° | 0.027° | 0.036° | OK |
| Cap | 0.1° | 0.109° | 0.146° | OK |
Conclusion
Lors du test de vol typique, Ellipse-D et Quanta Micro / Ekinox Micro ont tous deux dépassé leurs spécifications dans des conditions de point unique en temps réel. Le test de vol acrobatique a également révélé qu'Ellipse-D et Quanta Micro / Ekinox Micro ont fourni des performances exceptionnelles, n'ont présenté aucune erreur et se sont étroitement alignés sur les valeurs spécifiées, qui sont généralement applicables aux conditions de vol normales.
Ces tests soulignent que les INS de SBG sont des outils très fiables et précis pour les applications de navigation aérienne dans des conditions de point unique. Ils offrent constamment des performances exceptionnelles, assurant la fiabilité dans des scénarios difficiles.