Ingénierie de véhicules autonomes : Navigation de Zurich UAS Racing avec l'Ellipse-D
Zurich UAS Racing a résolu les problèmes critiques de dérive de position qui rendaient auparavant impossible le fonctionnement sans conducteur. Cette avancée dans l'ingénierie des véhicules autonomes permet désormais à l'équipe de commencer son parcours vers la discipline d'autocross dans la célèbre compétition Formula Student.
L'Ellipse-D nous permet d'obtenir une position absolue de notre voiture sur la piste. Une position précise est essentielle au fonctionnement de notre système sans conducteur. L'un de nos plus gros problèmes a été la dérive de position au fil du temps. Avec l'Ellipse-D, nous pourrons aborder la discipline de l'autocross, ce qui était auparavant impossible pour nous. | Finn Scheller, C-Leader de l'équipe Zurich UAS Racing.

L'expérience de l'équipe en ingénierie des véhicules autonomes
Zurich UAS Racing (ZUR) est une équipe Formula Student passionnée de l'Université des sciences appliquées de Zurich à Winterthur, en Suisse. Fondée en 2019, cette association étudiante ambitieuse participe à la plus grande compétition d'ingénierie au monde, Formula Student, en construisant des voitures électriques et autonomes pour courir contre des universités du monde entier.

L'équipe s'est agrandie et compte désormais plus de 70 étudiants motivés issus de divers programmes d'études, tous unis par leur objectif d'optimiser les performances de course et de faire progresser l'ingénierie des véhicules autonomes.
Formula Student
La compétition Formula Student, de renommée internationale, met au défi les équipes d'étudiants de concevoir et de construire des voitures de course de Formule, en participant à diverses disciplines, notamment la conception technique, l'analyse des coûts et les épreuves dynamiques sur piste.

La voiture : ZUR04
Le parcours de ZUR a commencé avec sa première voiture fonctionnelle en 2021, participant avec succès à des événements de véhicules électriques (VE) depuis 2022. Sa voiture de course sans conducteur, ZUR04, représente la pointe de l'ingénierie des véhicules autonomes étudiants avec quatre moteurs électriques dans les moyeux de roues produisant une puissance totale de 140 kW, permettant une accélération de 0 à 100 km/h en seulement 2,5 secondes.
Le véhicule est conçu pour la course avec ou sans pilote, avec des performances comparables à celles des voitures de course professionnelles. Son système sans conducteur est actuellement en phase de test.
Les exigences techniques de Zurich UAS Racing
ZUR avait besoin d'un Système de Navigation Inertielle (INS) avancé qui pourrait s'intégrer de manière transparente à son système de course autonome tout en répondant aux exigences rigoureuses de la compétition à grande vitesse.
Leur principal défi était de parvenir à un positionnement fiable dans l'environnement dynamique de la course, où les systèmes de localisation traditionnels échouent souvent en raison de la dérive de position au fil du temps.
Le système devait fournir une précision de position absolue essentielle au fonctionnement de leur système sans conducteur, en particulier pour la discipline difficile de l'autocross qui nécessite une navigation précise à travers des arrangements de cônes complexes.
Donc, en résumé, voici les problèmes critiques :
- Dérive de position : dérive importante au fil du temps empêchant une localisation précise.
- Limitation de l'autocross : incapacité de participer à la discipline de l'autocross en raison de problèmes de positionnement.
- Informations limitées sur les données : données insuffisantes sur la dynamique du véhicule pour l'optimisation du logiciel.

Et voici les exigences de base :
- Localisation précise : Besoin d'une position absolue sur la piste.
- Intégration ROS : Intégration transparente avec le système autonome existant basé sur ROS.
- Solution compacte : Unité légère avec un bon rapport puissance/poids.
- Documentation ouverte : Ressources techniques facilement accessibles.
- Dynamique élevée : Capacité à gérer des conditions de course extrêmes.
Après avoir évalué le scénario de ZUR, nous avons recommandé notre Ellipse-D, un système de navigation inertielle (INS) spécialement conçu pour les applications exigeantes où la précision et la fiabilité sont primordiales.
Notre solution pour la course autonome : Ellipse-D
Ellipse-D est le plus petit système GNSS/INS RTK à double antenne, offrant un positionnement au centimètre près et un cap précis pour les applications de course dynamiques.
Cette technologie représente une avancée significative dans les solutions d'ingénierie des véhicules autonomes, offrant à l'équipe :
- Haute précision : Précision de positionnement au centimètre près, essentielle pour une navigation précise sur la piste et l'évitement d'obstacles dans les courses autonomes.
- Cap à double antenne : Performances supérieures dans les environnements difficiles où les interférences magnétiques des moteurs électriques et des systèmes électroniques compromettraient les systèmes traditionnels à base de compas.
- Conformité aux courses : Conception compacte et construction robuste, idéales pour les applications de course à dynamique élevée, avec une résistance exceptionnelle aux vibrations et à la température.

Enfin, le quatrième point essentiel pour l'ambition de ZUR était l'intégration ROS qui, selon leurs propres termes, combinée aux autres caractéristiques, faisait de l'ensemble la solution la plus rentable disponible sur le marché :
“Le principal argument de vente pour nous était la documentation open source et la bibliothèque d'interface. Le support complet via ROS est également un grand avantage pour nous car notre voiture exécute déjà ROS. L'intégration a donc été facile. Nous avons également apprécié le soutien de SBG Systems à notre équipe pour améliorer nos performances grâce à leurs produits. Comparé à d'autres fournisseurs de tels produits, SBG Systems nous a offert le meilleur rapport qualité-prix,” souligne Scheller.
Intégration et performances avancées
Le processus d'intégration a démontré la polyvalence de l'Ellipse-D et l'efficacité de l'approche de support de SBG Systems. Connecté à la fois à une plateforme informatique RaspberryPi et NVIDIA Jetson, le système utilise à la fois la bibliothèque sbgECom et le package ROS2 pour un accès et un traitement complets des données.
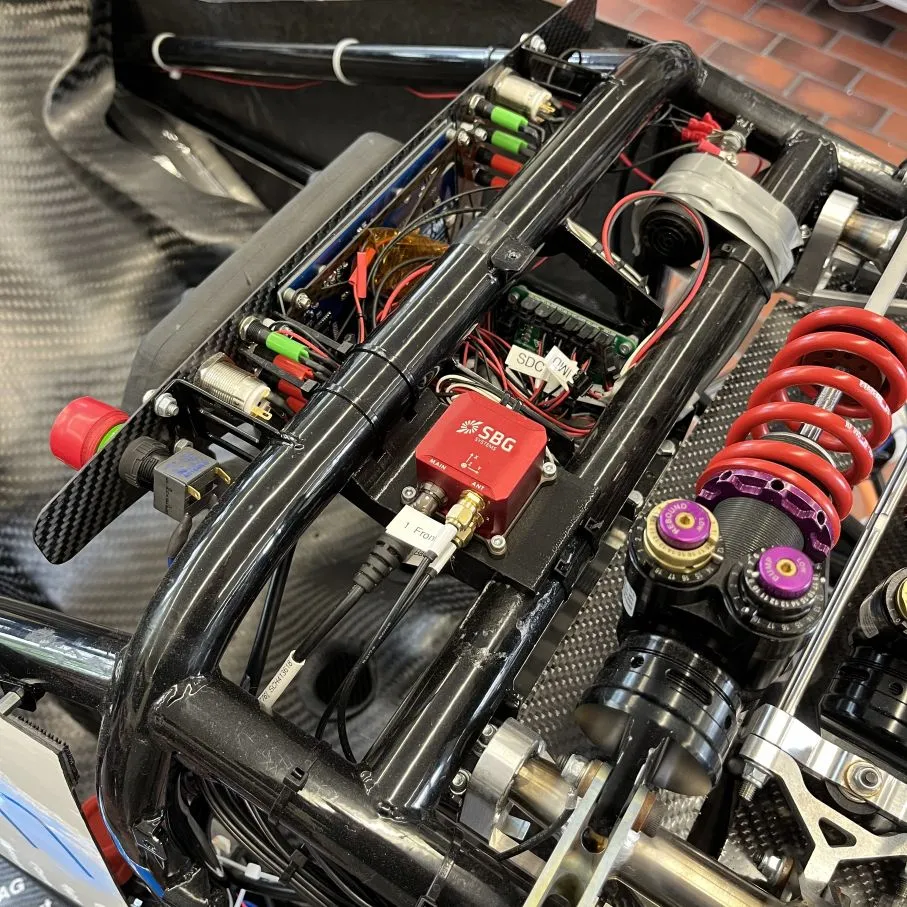
Cette architecture permet la distribution de données de navigation en temps réel dans tout le système autonome tout en maintenant la flexibilité nécessaire au développement d'algorithmes personnalisés.
L'équipe exploite également les capacités de l'Ellipse-D pour développer des algorithmes avancés de vectorisation du couple qui utilisent les données de l'INS. Ils ont également construit un rover et une station de base GNSS RTK pour fournir une vérité terrain précise de la piste.
En plus d'intégrer l'INS dans leur voiture sans conducteur ZUR04, avec des essais sur piste prévus pour cet été, l'équipe a intégré l'INS dans sa nouvelle voiture de course, la ZUR05. L'Ellipse-D sera également un élément clé du véhicule sans conducteur de la saison prochaine, la ZUR06.
Les trois principaux atouts de Zurich UAS Racing
ZUR a souligné trois aspects remarquables qu'elle apprécie dans sa collaboration avec SBG Systems.
- Open source : Tout d'abord, ils ont apprécié l'approche open source qui s'aligne sur leur mission éducative et leur méthodologie de développement. La documentation transparente et les bibliothèques d'interface permettent aux étudiants de comprendre et de modifier le système en fonction de leurs besoins spécifiques, offrant ainsi des opportunités d'apprentissage inestimables dans le domaine de l'ingénierie des véhicules autonomes.
- Excellente documentation : L'équipe a apprécié la documentation produit complète et librement disponible qui a rationalisé son processus d'intégration. Contrairement à de nombreux systèmes commerciaux qui fournissent des détails techniques limités, l'approche de SBG Systems a permis une compréhension et une mise en œuvre rapides.
- Bonne communication : Enfin, ils ont souligné l'excellente communication et le support, notant qu'ils se sont toujours sentis écoutés et ont reçu des réponses à toutes leurs questions. Ce support réactif s'est avéré crucial pour une équipe d'étudiants travaillant dans des délais de compétition serrés.
Conclusion
La mise en œuvre a répondu au défi le plus critique de ZUR : la dérive de position qui les avait auparavant empêchés de participer à la discipline de l'autocross. Grâce à la précision au centimètre près de l'Ellipse-D et à la détermination du cap à double antenne, l'équipe peut désormais commencer des essais avec l'objectif de participer sans conducteur à la prochaine saison (été 2026) avec sa voiture de course de nouvelle génération.

Cette collaboration illustre la puissance des partenariats industrie-éducation pour faire progresser la technologie des véhicules autonomes.
"Ellipse est le point d'entrée idéal dans les systèmes INS. À l'avenir, nous prévoyons d'utiliser des systèmes plus puissants en conjonction avec notre nouveau système de véhicule basé sur Ethernet,” conclut Scheller.
Notre engagement à soutenir les équipes étudiantes comme ZUR démontre comment l'accès à une technologie de navigation de qualité professionnelle permet à la prochaine génération d'ingénieurs de repousser les limites de ce qui est possible dans la course autonome.
Ellipse-D
L'Ellipse-D est un système de navigation inertielle compact et performant, assisté par GNSS, qui fournit des mesures fiables d'orientation, de position et de pilonnement.
Il combine une IMU avec un récepteur GNSS bi-bande et utilise des algorithmes de fusion de capteurs pour fournir un positionnement précis dans des environnements difficiles.
Il offre une capacité de double antenne pour un cap précis dans des conditions statiques.

Demander un devis pour l'Ellipse-D
Vous avez des questions ?
Bienvenue dans notre section FAQ ! Vous trouverez ici les réponses aux questions les plus fréquemment posées sur les applications que nous présentons. Si vous ne trouvez pas ce que vous cherchez, n'hésitez pas à nous contacter directement !
Comment fonctionnent les voitures autonomes ?
Les voitures autonomes sont des véhicules équipés de systèmes sophistiqués qui leur permettent de se déplacer et de se contrôler sans intervention humaine. Ces véhicules utilisent une combinaison de capteurs de conduite autonome et d'algorithmes pour percevoir leur environnement, prendre des décisions et effectuer des tâches de conduite autonome. L'objectif est d'atteindre une autonomie totale, où le véhicule peut gérer tous les aspects de la conduite de manière sûre et efficace.
Les voitures autonomes reposent sur un ensemble de technologies clés pour percevoir leur environnement. Ceux-ci inclus:
- GNSS (Global Navigation Satellite System) : pour obtenir les mises à jour en temps réel sur la position, la vitesse et la direction de la voiture autonome.
- INS (Inertial Navigation Systems) : pour maintenir la précision en cas de panne du signal GNSS. Il fournit des mises à jour en temps réel sur la position, la vitesse et la direction de la voiture autonome.
- LiDAR (Light Detection and Ranging) : utilisation de faisceaux laser pour créer une carte 3D détaillée de l'environnement du véhicule. Cette technologie aide la voiture à détecter et à mesurer les objets qui l'entourent, y compris les autres véhicules, les piétons et les panneaux de signalisation.
- Radar (Radio Detection and Ranging) : utilisation d'ondes radio pour détecter la vitesse, la distance et la direction des objets. Le radar est particulièrement utile dans des conditions météorologiques défavorables et pour détecter des objets à plus longue portée.
- Caméras : pour capturer des informations visuelles sur l'environnement du véhicule, notamment le marquage des voies, les feux de circulation et les panneaux de signalisation. Elles sont essentielles pour interpréter les signaux visuels complexes et prendre des décisions basées sur des données visuelles.
Quels sont les 6 niveaux d'automatisation des véhicules ?
Les 6 niveaux de voitures autonomes, définis par la Society of Automotive Engineers (SAE) dans leur norme J3016, décrivent les degrés d’automatisation des véhicules. Voici une ventilation :
- Niveau 0 : aucune automatisation. Avertissements ou assistance momentanée, comme le freinage d'urgence automatique ou les avertissements d'angle mort, mais aucune automatisation soutenue.
- Niveau 1 : assistance au conducteur. Système automatisé unique pour l'assistance, tel que le régulateur de vitesse adaptatif (maintien de la vitesse et de la distance) ou l'aide au maintien dans la voie.
- Niveau 2 : automatisation partielle. Combinaison de systèmes, tels que la direction et l'accélération/décélération, mais aucune prise de décision.
- Niveau 3 : automatisation conditionnelle. La voiture gère la plupart des tâches de conduite dans des conditions spécifiques (par exemple, la conduite sur autoroute). Le système peut surveiller l'environnement.
- Niveau 4 : automatisation élevée. La voiture fonctionne de manière indépendante dans des scénarios prédéfinis. Aucune attention du conducteur n'est requise dans ces zones.
- Niveau 5 : automatisation complète. Le véhicule peut effectuer toutes les tâches dans tous les environnements qu'un conducteur humain pourrait gérer. Il peut ne pas y avoir de volant ou de pédales.
Ces niveaux illustrent la progression des véhicules contrôlés par l’homme aux systèmes entièrement autonomes capables de gérer toutes les tâches de conduite.
L'INS accepte-t-il les entrées de capteurs d'aide externes ?
Les systèmes de navigation inertielle de notre société acceptent les entrées de capteurs d'aide externes, tels que les capteurs de données aériennes, les magnétomètres, les odomètres, le DVL et autres.
Cette intégration rend l'INS très polyvalent et fiable, en particulier dans les environnements où le GNSS est indisponible.
Ces capteurs externes améliorent les performances globales et la précision de l'INS en fournissant des données complémentaires.
Quelle est la différence entre une IMU et un INS ?
La différence entre une unité de mesure inertielle (IMU) et un système de navigation inertielle (INS) réside dans leur fonctionnalité et leur complexité.
Une IMU (unité de mesure inertielle) fournit des données brutes sur l'accélération linéaire et la vitesse angulaire du véhicule, mesurées par des accéléromètres et des gyroscopes. Elle fournit des informations sur le roulis, le tangage, le lacet et le mouvement, mais ne calcule pas la position ou les données de navigation. L'IMU est spécifiquement conçue pour relayer des données essentielles sur le mouvement et l'orientation pour un traitement externe afin de déterminer la position ou la vitesse.
D'autre part, un INS (système de navigation inertielle) combine les données de l'IMU avec des algorithmes avancés pour calculer la position, la vitesse et l'orientation d'un véhicule au fil du temps. Il intègre des algorithmes de navigation comme le filtrage de Kalman pour la fusion et l'intégration des capteurs. Un INS fournit des données de navigation en temps réel, y compris la position, la vitesse et l'orientation, sans dépendre de systèmes de positionnement externes comme le GNSS.
Ce système de navigation est généralement utilisé dans les applications qui nécessitent des solutions de navigation complètes, en particulier dans les environnements où le GNSS est inaccessible, comme les drones militaires, les navires et les sous-marins.
Quelle est la différence entre un AHRS et un INS ?
La principale différence entre un Attitude and Heading Reference System (AHRS) et un Inertial Navigation System (INS) réside dans leur fonctionnalité et l'étendue des données qu'ils fournissent.
Un AHRS fournit des informations d'orientation, en particulier l'attitude (tangage, roulis) et le cap (lacet) d'un véhicule ou d'un appareil. Il utilise généralement une combinaison de capteurs, notamment des gyroscopes, des accéléromètres et des magnétomètres, pour calculer et stabiliser l'orientation. L'AHRS fournit la position angulaire sur trois axes (tangage, roulis et lacet), ce qui permet à un système de comprendre son orientation dans l'espace. Il est souvent utilisé dans l'aviation, les UAV, la robotique et les systèmes marins pour fournir des données d'attitude et de cap précises, ce qui est essentiel pour le contrôle et la stabilisation du véhicule.
Un INS fournit non seulement des données d'orientation (comme un AHRS), mais suit également la position, la vitesse et l'accélération d'un véhicule au fil du temps. Il utilise des capteurs inertiels pour estimer le mouvement dans l'espace 3D sans s'appuyer sur des références externes comme le GNSS. Il combine les capteurs présents dans l'AHRS (gyroscopes, accéléromètres), mais peut également inclure des algorithmes plus avancés pour le suivi de la position et de la vitesse, intégrant souvent des données externes comme le GNSS pour une précision accrue.
En résumé, l'AHRS se concentre sur l'orientation (attitude et cap), tandis que l'INS fournit une suite complète de données de navigation, y compris la position, la vitesse et l'orientation.