
Dans un scénario quotidien, la précision d'un système mondial de navigation par satellite (GNSS) autonome est plus que suffisante pour aider quelqu'un à s'orienter, mais de nombreuses applications nécessitent une plus grande précision. De nombreuses technologies de corrections différentielles ont été développées pour améliorer la précision du GNSS à moins de 1 cm, ce qui permet un large éventail de nouvelles applications.
L'obtention d'une telle précision nécessite de prêter attention au référentiel utilisé pour les calculs et les résultats de positionnement, un sujet abordé dans Géodésie et transformations de datum, ce qui dépasse le cadre de cet article.
Corrections GNSS
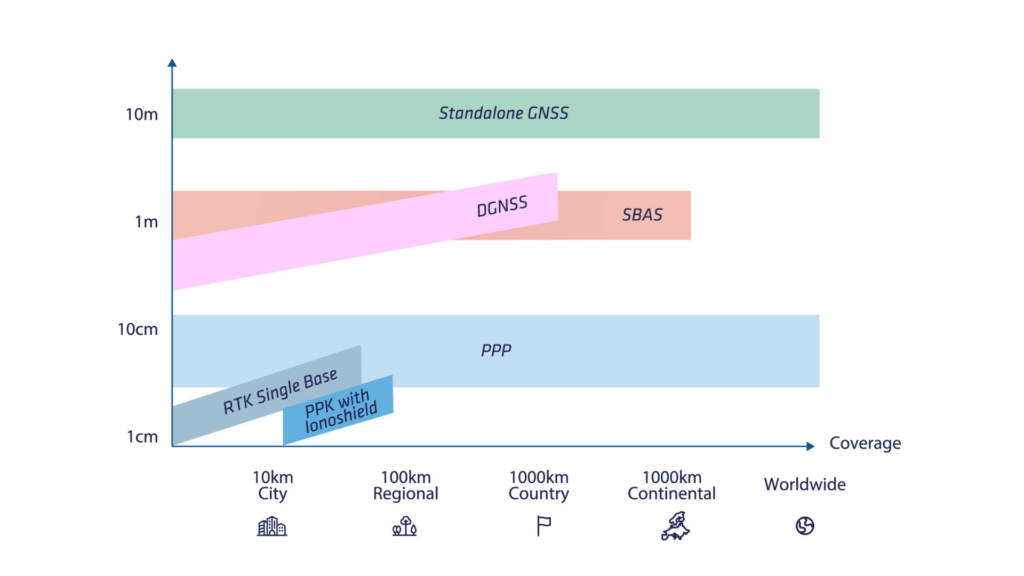
L'amélioration de la précision du GNSS repose sur la correction de diverses erreurs.
Il existe de nombreux types de corrections qui offrent différents niveaux de couverture et de performance.
Les principales sont détaillées dans le tableau ci-dessous. Dans cet article, nous aborderons les bases des corrections les plus courantes : une brève explication du DGNSS, suivie d'explications approfondies du SBAS et du RTK ; et nous décrirons les avantages du PPK.
Le prochain article de cette série examinera de plus près Ionoshield et PPP plus en détail.
GNSS différentiel (DGNSS)
Le DGNSS traditionnel basé sur le code fait une hypothèse simple : les erreurs des satellites et les erreurs atmosphériques locales sont supposées être les mêmes dans les petites zones. Une paire de récepteurs GPS peut alors être utilisée pour annuler à la fois les erreurs atmosphériques (ionosphériques et troposphériques) et les erreurs des satellites, améliorant ainsi les performances de navigation.
Dans ce mode de fonctionnement, un récepteur GNSS de station de base est installé à quelques kilomètres de la portée de fonctionnement du récepteur GNSS du mobile. La station de base transmet un ensemble de corrections au récepteur du mobile à l'aide d'un modem RF ou GSM. Le récepteur du mobile peut alors utiliser ces corrections pour calculer une position différentielle (par rapport à la station de base).
Cette technique peut améliorer la précision de la navigation au niveau sub-métrique, mais elle est maintenant obsolète car le RTK est devenu la norme pour le positionnement de haute précision.
SBAS (Satellite Based Augmentation System)
Le SBAS a été développé pour permettre la navigation sûre des aéronefs civils. Il a depuis été utilisé pour de nombreuses autres applications d'utilisateurs finaux qui nécessitent une plus grande précision qu'un récepteur GNSS autonome.
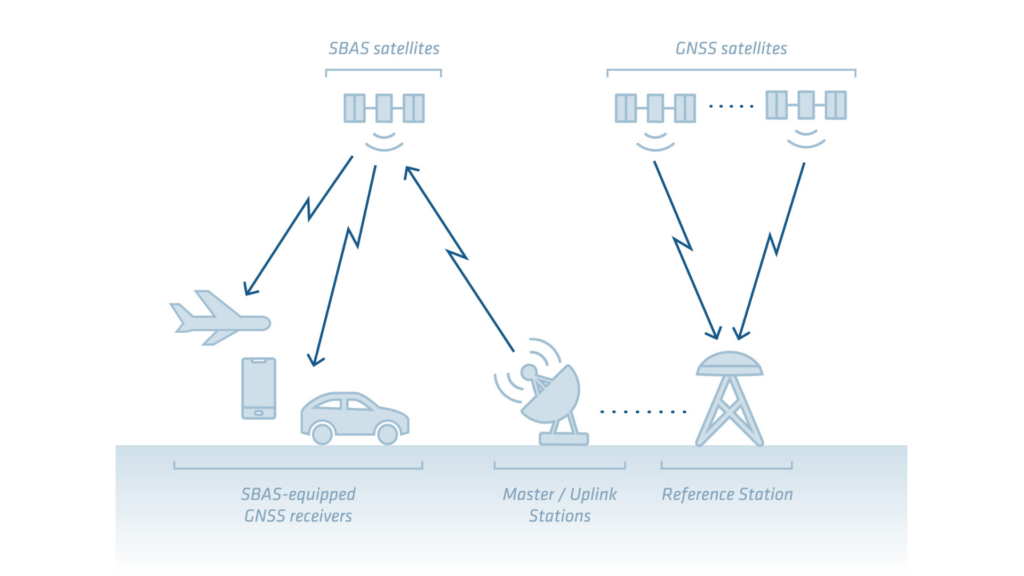
Le concept du SBAS est d'utiliser un réseau de stations de référence pour calculer des corrections qui peuvent améliorer les performances du GPS sur une large zone (couverture continentale).
Ces corrections sont ensuite diffusées par des satellites géostationnaires SBAS dédiés. Les récepteurs GNSS modernes peuvent suivre ces corrections directement via leur antenne GNSS régulière et les utiliser dans leur moteur de positionnement, tel que le SBAS qui offre une précision de 1 mètre.
L'objectif principal de toutes les constellations SBAS n'est pas d'atteindre une précision maximale, mais de permettre au GNSS d'atteindre une précision minimale pour l'application prévue (navigation et atterrissage des aéronefs) avec un concept d'intégrité ajouté (mesure précise de l'erreur de position).
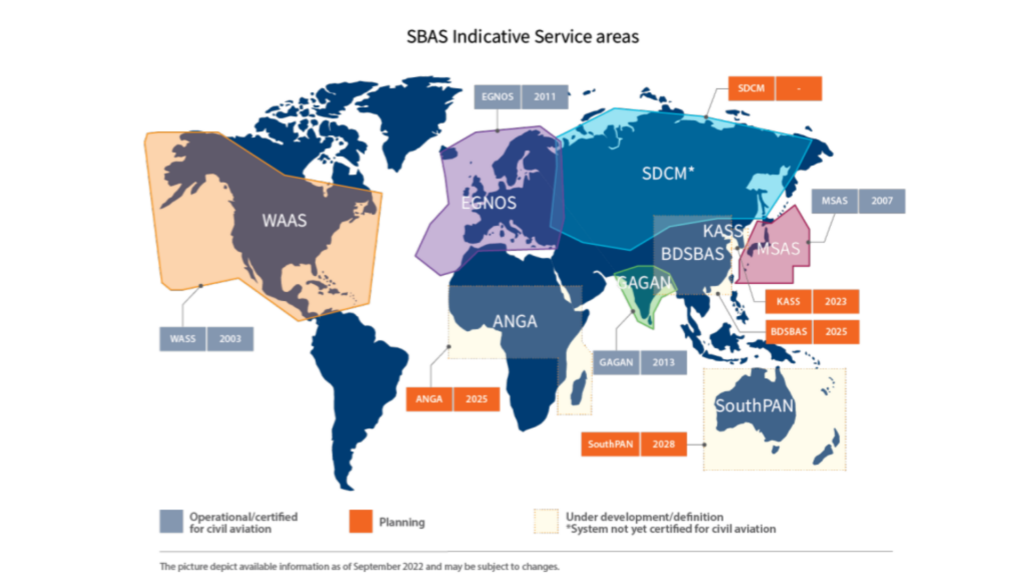
Les systèmes SBAS actuellement utilisés sont les suivants :
- WAAS pour les pays d'Amérique du Nord
- EGNOS pour l'Europe
- GAGAN pour l’Inde
- MSAS pour le Japon
Cependant, la plupart des SBAS actuels ne fournissent que des corrections pour la constellation GPS, ce qui les rend sous-optimaux pour la navigation terrestre. Les futures solutions SBAS (par exemple, EGNOS V2) fourniront des corrections multi-constellations.
Technologie derrière le SBAS
Les différentes solutions SBAS utilisent la même technologie sous-jacente pour fournir des corrections. Elles fournissent des corrections pour :
- Erreurs d'horloge des satellites
- Déviations de l'orbite des satellites
- Erreurs atmosphériques
Le SBAS fournit également des informations sur l'intégrité des satellites, qui peuvent être utilisées pour rejeter les données provenant de satellites défectueux.
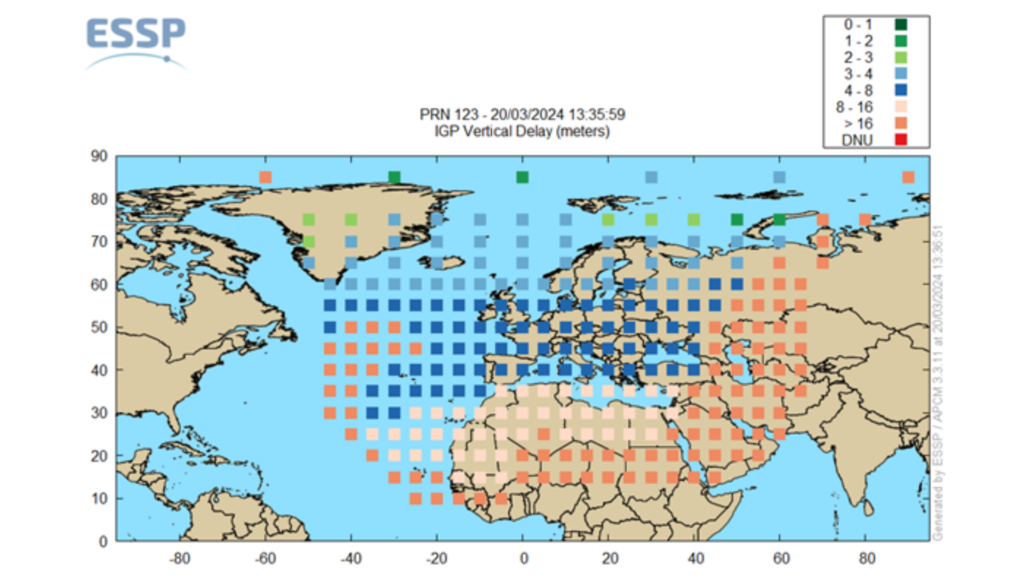
Des corrections atmosphériques sont également calculées à l'aide du réseau de stations de base afin de fournir un modèle des erreurs atmosphériques. La valeur d'erreur transférée correspond au retard vertical introduit par l'atmosphère à des points donnés appelés IGP (Ionospheric Grid Points). Le récepteur peut alors corriger le retard pour les différents signaux de chaque satellite.
En utilisant les informations fournies par le SBAS, le récepteur peut corriger les erreurs dans la mesure basée sur le pseudo-range, améliorant la précision de la position à environ 1,2 m RMS horizontal et 1,6 m RMS vertical. Il s'agit d'une amélioration significative par rapport au GNSS autonome, en particulier pour la composante verticale.
Cinématique Temps Réel (RTK) et Cinématique Post-traitée (PPK)
La technologie RTK a été introduite pour la première fois dans les applications de topographie au milieu des années 1990. Comme le système différentiel mondial de positionnement (DGPS) traditionnel, le RTK repose sur une station de base positionnée avec précision et des récepteurs GNSS mobiles.
Deux étapes de calcul clés permettent un positionnement précis au centimètre près:
- Double différence
- Mesure de phase porteuse et résolution d'ambiguïtés
Double différence
Le DGPS utilise généralement des mesures de code et de différence unique uniquement.
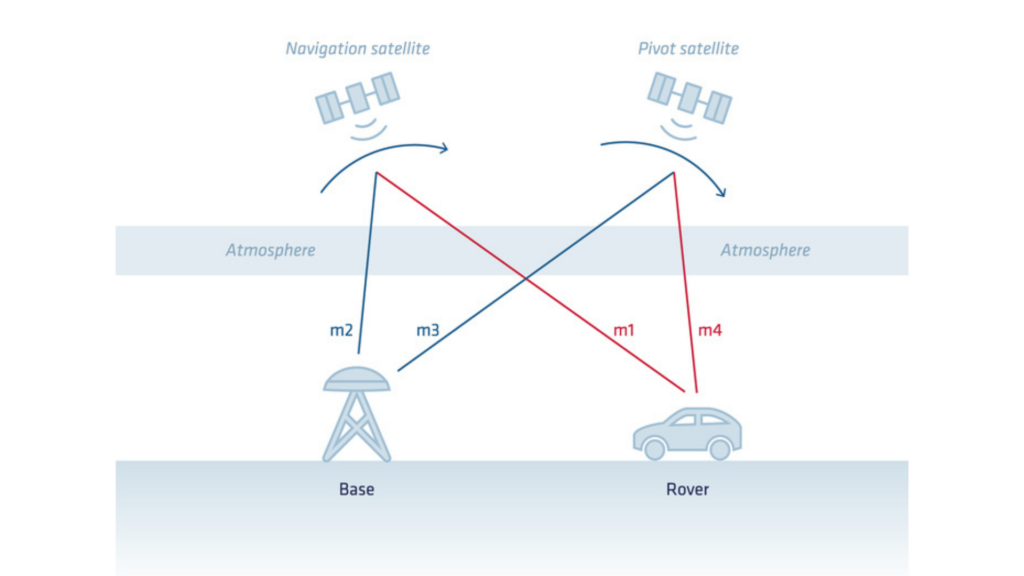
D'autre part, le RTK ajoute des mesures de phase et utilise une approche de « double différence ». Dans cette méthode, les mesures de la station de base sont soustraites des mesures du mobile, et toutes les mesures des satellites de navigation sont soustraites d'un satellite pivot.
Cette approche peut compenser toutes les erreurs induites par les satellites, les erreurs induites par le récepteur, ainsi que les erreurs atmosphériques qui sont supposées constantes au voisinage de la station de base.
À partir de ce calcul, nous obtenons :
- La position du mobile (latitude/longitude/altitude) dans le datum de la station de base
- L'heure du mobile
La distance entre la station de base et le mobile est appelée la ligne de base et est un facteur clé dans le RTK. À mesure que la ligne de base augmente, le budget d'erreur augmente marginalement, car les erreurs atmosphériques communes et les erreurs d'orbite des satellites communs ne sont pas complètement annulées. C'est le « +1 ppm » typique que l'on retrouve dans les spécifications de précision de la position RTK.
Mesure de phase porteuse et résolution d'ambiguïtés
La mesure de phase de porteuse, introduite dans notre précédent article, est nécessaire pour réduire les erreurs au niveau centimétrique.
Le défi avec les mesures de phase de porteuse est qu'elles sont intrinsèquement ambiguës (ou incomplètes). Il manque un nombre entier de cycles de phase de porteuse dans la mesure. Cette partie manquante est également appelée « ambiguïté ».
Le processus de positionnement Real-Time Kinematic (RTK) commence par l'estimation de ces ambiguïtés. Ce processus est également connu sous le nom de mode « RTK Float ». Dans ce mode, les ambiguïtés convergent lentement mais ne sont pas des valeurs entières. Cela permet au récepteur de lisser la position et d'atteindre une précision d'environ un décimètre.
Pour atteindre une précision et une robustesse maximales, l'étape suivante consiste à identifier la valeur entière pour chacune de ces ambiguïtés en temps réel. Ce processus est appelé résolution d'ambiguïté entière.
Le résultat de la résolution d'ambiguïté maximise la précision RTK et offre une plus grande robustesse. Ceci est communément appelé mode « RTK Fixed ».
Si le suivi de phase vers un satellite particulier est interrompu, un événement de « cycle slip » se produit et l'ambiguïté entière pour ce satellite doit être résolue à nouveau. Pour cette raison, un trop grand nombre de cycle slips (et en particulier les cycle slips sur tous les satellites en même temps) ont un effet négatif sur les performances RTK. Une bonne antenne et un bon placement d'antenne ainsi qu'un environnement RF propre sont essentiels pour limiter ces événements.
Post-processing Kinematics
Comme nous l'avons vu, le RTK est l'application de ces corrections “en temps réel”, ce qui signifie que le mobile doit avoir une liaison de données avec la station de base afin de calculer le traitement RTK sur le terrain.
Certaines applications n'ont pas besoin de la trajectoire en temps réel, mais pourraient bénéficier d'une plus grande précision ou d'une configuration plus simple. Le Post Processing Kinematic (PPK) peut répondre à ces besoins. Avec le PPK, le mobile collecte ses propres données GNSS brutes pendant la collecte de données sans recevoir de corrections en temps réel. Plus tard, ces données sont post-traitées à l'aide d'informations précises provenant d'une station de base ou d'un réseau de stations de référence.
Le PPK offre plus de flexibilité dans la collecte de données, car il ne repose pas sur des corrections en temps réel. Il est souvent utilisé dans les scénarios où la communication en temps réel est difficile ou inutile, comme la cartographie aérienne, les levés par drone ou la recherche scientifique.
Avantages de l'utilisation du PPK pour les corrections différentielles.
Le PPK offre les principaux avantages suivants lors du traitement GNSS:
- Amélioration du flux de travail sur le terrain : Un coût majeur d'une mission basée sur le RTK est de s'assurer qu'une station de base est à proximité, de mettre en place une station de base si nécessaire, d'assurer une connexion de données fiable, etc. Qinertia possède un grand nombre de réseaux CORS intégrés et un accès direct aux réseaux tiers. Cela élimine la complexité de s'assurer de la disponibilité d'une base et de mettre en place une connexion de données fiable.
- Amélioration du contrôle qualité : De nombreux indicateurs de qualité permettent d'évaluer les performances réelles d'un traitement. Il s'agit notamment de statistiques avancées, de la séparation (différence entre la position/attitude calculée pendant le traitement aller et le traitement retour), ainsi que des indicateurs de signaux GNSS.
- Amélioration globale des performances : La résolution d'ambiguïtés RTK peut prendre un certain temps (de quelques secondes à quelques minutes selon la distance à la station de base et les conditions atmosphériques). Cela peut être important au début d'une acquisition ou dans des conditions GNSS difficiles. Le PPK atténue ces effets en traitant dans les deux sens, aller et retour, afin de maximiser le taux de fix. Les performances peuvent également être améliorées en utilisant des algorithmes plus avancés ou en utilisant des éphémérides de satellites précises.