Navigation de haute précision pour les véhicules autonomes
Les centrales de navigation inertielle (INS) offrent de nombreux avantages pour les applications de véhicules autonomes. En utilisant des capteurs tels que des accéléromètres et des gyroscopes, les solutions INS fournissent des données de navigation continues et précises sans dépendre de signaux externes.
Nos INS fournissent des mises à jour en temps réel sur la position, la vitesse et l'orientation du véhicule, garantissant une navigation précise, même dans les environnements où le GNSS est inaccessible. Nous avons développé des algorithmes avancés pour minimiser les erreurs au fil du temps, maintenant ainsi la précision du positionnement du véhicule.

Robustesse dans les environnements difficiles
Nos INS peuvent fonctionner efficacement dans les zones où les signaux GNSS sont faibles ou difficiles, comme dans les tunnels, dans les canyons urbains ou sous un couvert végétal. Elles offrent une protection contre le brouillage ou l'usurpation de signaux et complèteront efficacement le GNSS pour améliorer la sécurité et la fiabilité de la conduite.
Accédez à un retour d'information instantané sur le mouvement du véhicule pour une prise de décision rapide et une réponse aux conditions changeantes. L'absence de dépendance à l'égard de signaux externes permet à nos solutions INS de fonctionner en continu, ce qui les rend idéales pour les environnements dynamiques.
Les données générées par les INS peuvent être utilisées pour des algorithmes de navigation avancés, tels que la planification de trajectoire, l'évitement d'obstacles et l'optimisation d'itinéraire. De plus, elles offrent des performances constantes quelles que soient les conditions extérieures, ce qui conduit à des systèmes autonomes plus fiables.

Données en temps réel et fusion de capteurs
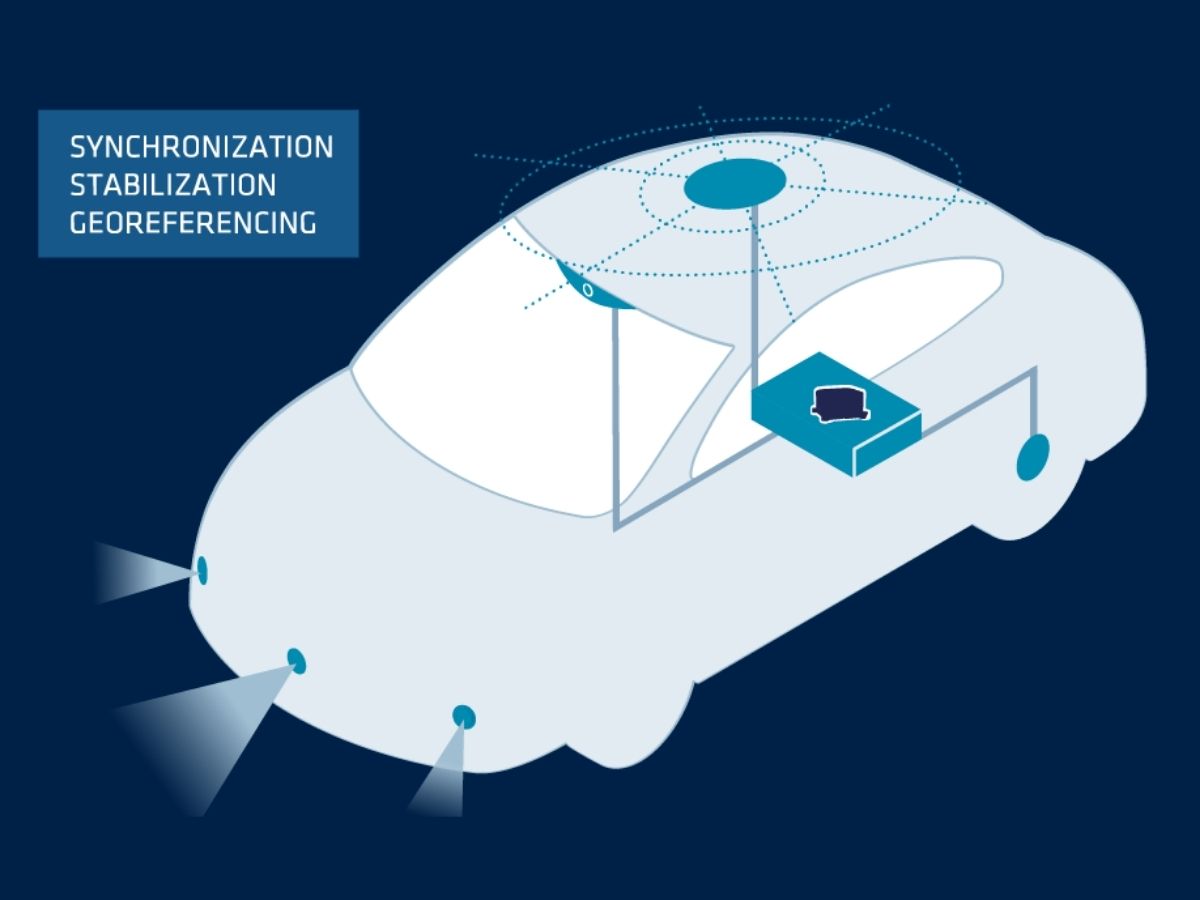
Nos capteurs fournissent des données de mouvement et d'orientation en temps réel, de sorte que les véhicules autonomes peuvent effectuer des ajustements immédiats de la direction, de l'accélération et du freinage en réponse aux changements de terrain, aux conditions routières ou à la circulation. Ils contribuent également au maintien de la stabilité et du contrôle.
Combinés à d'autres aides à la navigation (par exemple, GNSS, LiDAR, caméras), ils améliorent la précision et la fiabilité globales. Cette fusion de capteurs améliore la connaissance de la situation et les capacités de prise de décision. En intégrant les données de plusieurs capteurs, nos INS peuvent aider à corriger les inexactitudes causées par des facteurs externes, assurant ainsi une navigation plus fiable.
Nos solutions pour les véhicules autonomes
Nos solutions s'intègrent parfaitement aux plateformes UGV, pour offrir des performances fiables, même dans les conditions les plus difficiles.

Ellipse-D

Ekinox Micro

Ekinox-D
Brochure sur les applications autonomes
Recevez notre brochure directement dans votre boîte de réception !
Études de cas
Découvrez comment les solutions inertielles de SBG Systems révolutionnent la technologie des véhicules autonomes dans notre section d'études de cas. Ces réussites concrètes mettent en évidence la façon dont nos capteurs inertiels avancés offrent une navigation précise et une fiabilité dans des environnements difficiles. Qu'il s'agisse d'améliorer la sécurité des véhicules en milieu urbain ou d'optimiser les performances dans des scénarios où le GNSS est inaccessible, nos solutions permettent aux véhicules autonomes de fonctionner avec une précision et un contrôle inégalés.
Chaque étude de cas fournit des informations précieuses sur les façons novatrices dont notre technologie façonne l'avenir du transport autonome.



Ils parlent de nous
Écoutez directement les témoignages des innovateurs et des clients qui ont adopté notre technologie.
Leurs témoignages et réussites illustrent l'impact significatif de nos capteurs dans les applications pratiques de véhicules autonomes.
Découvrez d'autres applications avec les systèmes inertiels autonomes
Découvrez comment les systèmes inertiels autonomes transforment les opérations dans divers secteurs. De la robotique et de l'automatisation industrielle à l'exploitation minière et à la logistique, nos solutions haute performance fournissent des données précises de navigation, d'orientation et de mouvement, même dans les environnements difficiles pour le GNSS. Explorez de nouvelles possibilités grâce à une autonomie fiable.
Vous avez des questions ?
Trouvez les réponses aux questions les plus fréquemment posées sur les applications que nous présentons. Si vous ne trouvez pas ce que vous cherchez, n'hésitez pas à nous contacter directement !
Quels sont les niveaux d'autonomie des véhicules autonomes ?
Les niveaux d'autonomie des véhicules autonomes sont classés en six niveaux (du niveau 0 au niveau 5) par la Society of Automotive Engineers (SAE), définissant le degré d'automatisation du fonctionnement du véhicule. Voici une ventilation :
- Niveau 0 : Aucune automatisation – Le conducteur humain contrôle entièrement le véhicule à tout moment, avec uniquement des systèmes passifs comme des alertes et des avertissements.
- Niveau 1 : Assistance au conducteur – Le véhicule peut aider à la direction ou à l'accélération/décélération, mais le conducteur humain doit rester en contrôle et surveiller l'environnement (par exemple, le régulateur de vitesse adaptatif).
- Niveau 2 : Automatisation partielle – Le véhicule peut contrôler simultanément la direction et l'accélération/décélération, mais le conducteur doit rester engagé et prêt à prendre le relais à tout moment (par exemple, le pilote automatique de Tesla, le Super Cruise de GM).
- Niveau 3 : Automatisation conditionnelle – Le véhicule peut gérer tous les aspects de la conduite dans certaines conditions, mais le conducteur humain doit être prêt à intervenir lorsque le système le demande (par exemple, la conduite sur autoroute). Le conducteur n'a pas besoin de surveiller activement, mais doit rester vigilant.
- Niveau 4 : Automatisation élevée – Le véhicule peut effectuer toutes les tâches de conduite de manière autonome dans des conditions ou des environnements spécifiques (comme les zones urbaines ou les autoroutes) sans intervention humaine. Cependant, dans d'autres environnements ou dans des circonstances particulières, un humain peut avoir besoin de conduire.
- Niveau 5 : Automatisation complète – Le véhicule est entièrement autonome et peut gérer toutes les tâches de conduite dans toutes les conditions sans aucune intervention humaine. Il n'est pas nécessaire d'avoir un conducteur, et le véhicule peut fonctionner n'importe où, dans n'importe quelles conditions.
Ces niveaux aident à définir l'évolution de la technologie des véhicules autonomes, de l'assistance de base au conducteur à l'autonomie complète.
Qu'est-ce qu'un odomètre ?
Un odomètre est un instrument utilisé pour mesurer la distance parcourue par un véhicule. Il fournit des informations importantes sur la distance parcourue par un véhicule, ce qui est utile à diverses fins telles que la planification de l'entretien, les calculs de rendement énergétique et l'évaluation de la valeur de revente.
Les odomètres mesurent la distance en fonction du nombre de rotations des roues du véhicule. Un facteur d'étalonnage, basé sur la taille des pneus, convertit les rotations des roues en distance.
Dans de nombreuses applications de navigation, en particulier dans les véhicules, les données de l'odomètre peuvent être intégrées aux données INS afin d'améliorer la précision globale. Ce processus, connu sous le nom de fusion de capteurs, combine les forces des deux systèmes.
Que sont le brouillage et l'usurpation d'identité ?
Le brouillage et l'usurpation sont deux types d'interférences qui peuvent affecter considérablement la fiabilité et la précision des systèmes de navigation par satellite comme le GNSS.
Le brouillage fait référence à la perturbation intentionnelle des signaux satellites par la diffusion de signaux d'interférence sur les mêmes fréquences que celles utilisées par les systèmes GNSS. Cette interférence peut submerger ou noyer les signaux satellites légitimes, rendant les récepteurs GNSS incapables de traiter l'information avec précision. Le brouillage est couramment utilisé dans les opérations militaires pour perturber les capacités de navigation des adversaires, et il peut également affecter les systèmes civils, entraînant des défaillances de navigation et des défis opérationnels.
L'usurpation, d'autre part, implique la transmission de signaux contrefaits qui imitent les signaux GNSS authentiques. Ces signaux trompeurs peuvent induire les récepteurs GNSS en erreur en leur faisant calculer des positions ou des heures incorrectes. L'usurpation peut être utilisée pour détourner ou désinformer les systèmes de navigation, ce qui peut amener les véhicules ou les aéronefs à dévier de leur trajectoire ou à fournir de fausses données de localisation. Contrairement au brouillage, qui ne fait qu'empêcher la réception des signaux, l'usurpation trompe activement le récepteur en présentant de fausses informations comme légitimes.
Le brouillage et l'usurpation constituent des menaces importantes pour l'intégrité des systèmes qui dépendent du GNSS, ce qui nécessite des contre-mesures avancées et des technologies de navigation résilientes pour assurer un fonctionnement fiable dans des environnements contestés ou difficiles.