Performances supérieures en cas de faible dynamique
Les systèmes de cartographie mobile avec IMU intégrées fournissent des données en temps réel, offrant des informations essentielles sur la dynamique environnementale.
Ces systèmes permettent la création de cartes haute définition (cartes HD) pour les véhicules autonomes, améliorent la précision et réduisent le risque de lacunes dans les données, ce qui les rend essentiels pour des applications telles que la cartographie des infrastructures, les levés routiers et l'analyse environnementale.
Grâce à l'intégration avancée du GNSS et de l'inertie, les systèmes de cartographie mobile offrent une configuration rapide et une initialisation rapide, minimisant les temps d'arrêt et permettant une collecte de données rapide. Ceci est particulièrement précieux dans les scénarios urgents, tels que les levés mobiles d'infrastructures ou la cartographie d'intervention d'urgence, où un déploiement rapide est crucial.
Dans les environnements à faible dynamique, tels que les véhicules se déplaçant lentement dans les zones urbaines ou à l'intérieur, les systèmes inertiels hautes performances maintiennent des données de positionnement et d'orientation précises. Alors que les systèmes GPS traditionnels peuvent avoir des difficultés dans de telles conditions, un INS intégré au GNSS garantit des données continues et fiables, même dans les environnements où le GNSS est indisponible.
En assurant des performances constantes, ces systèmes produisent des modèles 3D précis, des cartes topographiques et des produits géospatiaux, quelle que soit la vitesse de déplacement ou la complexité de l'environnement.

Interface de communication unique avec synchronisation intégrée
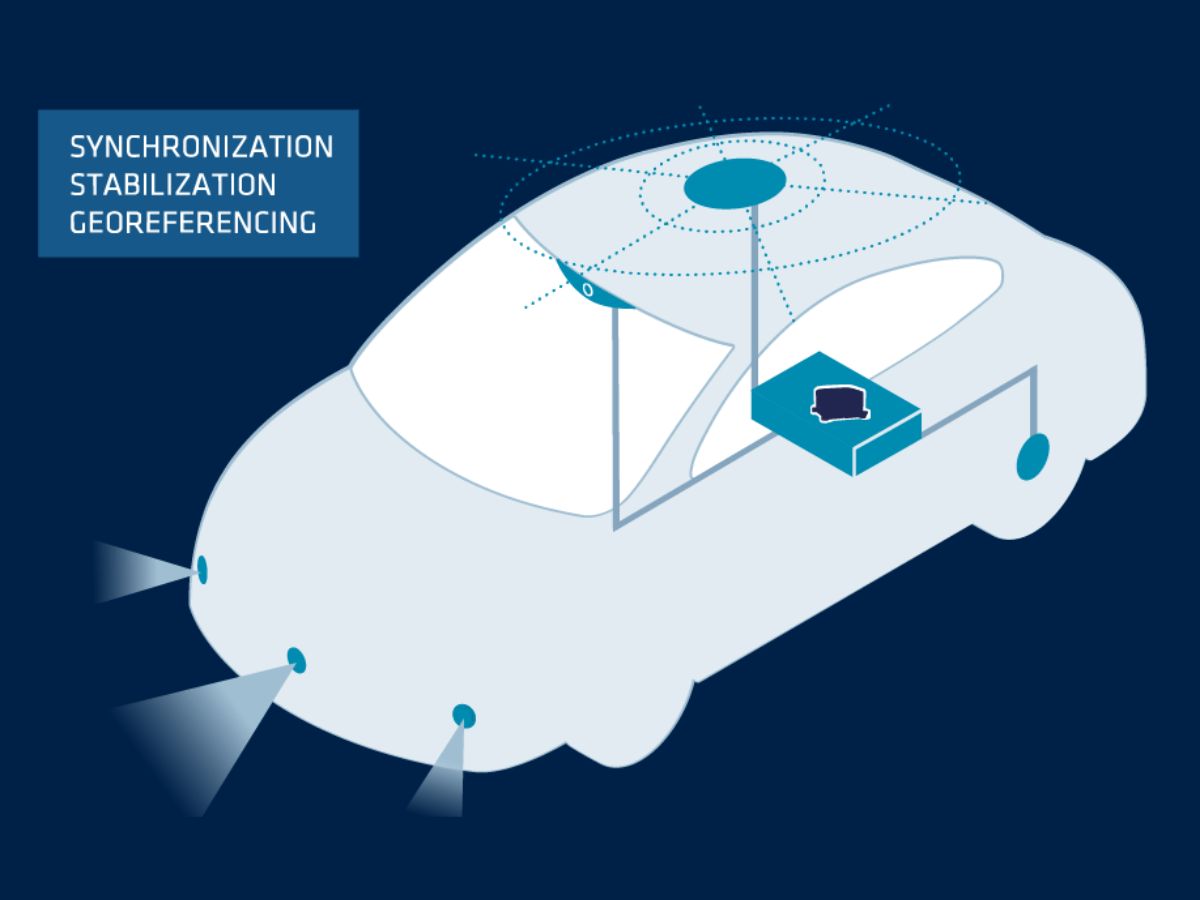
Nos systèmes inertiels prennent en charge un processus d'intégration simplifié avec une interface de communication unique. L'INS peut servir de plaque tournante centrale pour les données des capteurs GNSS et LiDAR. En utilisant les protocoles de communication standard de l'industrie, Ethernet ou le bus CAN, vous pouvez interfacer l'INS avec votre récepteur GNSS et votre système LiDAR mobile, minimisant ainsi la complexité du matériel et évitant le besoin de plusieurs liaisons de communication.
Nos solutions INS sont dotées de capacités de synchronisation intégrées qui garantissent une fusion transparente des données entre le GNSS, le LiDAR et les données inertielles.
L'INS peut servir d'horloge maître PTP, synchronisant les horodatages de tous les capteurs, ce qui est essentiel pour les opérations SLAM. Avec les fonctions d'horloge en temps réel (RTC) et la capacité de gérer la synchronisation GNSS et les signaux de déclenchement externes, l'INS garantira que les données GNSS et LiDAR sont correctement alignées pour un traitement SLAM précis.
Capacités de traitement en temps réel et post-traitement
Les systèmes de cartographie mobile (MMS) offrent des capacités en temps réel et de post-traitement, permettant aux utilisateurs d'accéder aux données immédiates tout en affinant les résultats ultérieurement pour une précision accrue.
L'acquisition de données en temps réel permet aux ingénieurs ou aux géomètres de faire des évaluations sur place, tandis que le logiciel de post-traitement garantit que le résultat final est aussi précis que possible. Les systèmes inertiels contribuent de manière significative à ce processus en maintenant des données de position cohérentes et fiables, même lorsque les signaux satellites sont indisponibles ou dégradés.
Les plates-formes de cartographie mobile équipées de systèmes inertiels offrent une flexibilité dans la collecte et l'analyse des données. Les opérateurs peuvent ajuster les paramètres à la volée, garantissant ainsi que leurs projets de cartographie répondent aux normes requises en matière de précision.
Pour un affinement supplémentaire, nous proposons Qinertia, un puissant logiciel de post-traitement qui améliore la précision de la trajectoire en améliorant les données GNSS et INS par la suite, ce qui peut compléter les flux de travail de cartographie basés sur SLAM.

Nos solutions pour la cartographie mobile
Nos systèmes de navigation inertielle (INS) sont conçus spécifiquement pour les marchés de la topographie, offrant des performances élevées et une facilité d'utilisation. Construits sur des capteurs inertiels avancés, ils intègrent des algorithmes de pointe et la technologie GNSS pour fournir des données de navigation et de positionnement précises. Nos systèmes sont hautement adaptables, avec des composants configurables pour répondre aux besoins spécifiques des applications

Ekinox-D

Apogee-D

Navsight Land-Air
Brochure sur les applications de cartographie
Recevez notre brochure directement dans votre boîte de réception !
Études de cas
SBG Systems s'est associé à des entreprises leaders dans divers secteurs pour fournir des solutions inertielles hautes performances pour la cartographie mobile. Nos études de cas présentent les réussites de projets où notre technologie a joué un rôle central dans l'acquisition et l'analyse des données.



Ils parlent de nous
Écoutez directement les témoignages des innovateurs et des clients qui ont adopté notre technologie.
Leurs témoignages et réussites illustrent l'impact significatif de nos capteurs dans les applications pratiques de véhicules autonomes.
Découvrez d'autres applications d'arpentage
SBG Systems propose des systèmes de navigation inertielle et des capteurs de mouvement hautes performances qui jouent un rôle essentiel dans les levés terrestres, maritimes et aériens. Du dragage et de la cartographie portuaire, de la cartographie intérieure à la photogrammétrie UAV, nos solutions inertielles aident les professionnels de la géospatiale à collecter des données précises de position, d'orientation et de mouvement dans tous les types d'environnements.
Explorez nos applications de topographie.
Vous avez des questions ?
Notre section FAQ couvre les questions les plus fréquemment posées sur les systèmes de cartographie mobile, y compris des informations sur les technologies impliquées, les meilleures pratiques et la manière d'intégrer nos produits dans vos solutions.
Qu'est-ce que le SLAM ?
SLAM, qui signifie Simultaneous Localization and Mapping (localisation et cartographie simultanées), est une technique de calcul utilisée en robotique et en vision artificielle pour construire une carte d'un environnement inconnu tout en assurant le suivi de la position d'un agent dans cet environnement. Ceci est particulièrement utile dans les scénarios où le GNSS n'est pas disponible, comme à l'intérieur ou dans les zones urbaines denses.
Les systèmes SLAM déterminent la position et l'orientation de l'agent en temps réel. Cela implique de suivre le mouvement du robot ou de l'appareil lorsqu'il se déplace dans l'environnement. Pendant que l'agent se déplace, le système SLAM crée une carte de l'environnement. Il peut s'agir d'une représentation 2D ou 3D, capturant la disposition, les obstacles et les caractéristiques de l'environnement.
Ces systèmes utilisent souvent plusieurs capteurs, tels que des caméras, des LiDAR ou des centrales de mesure inertielle (IMU), pour recueillir des données sur l'environnement. Ces données sont combinées pour améliorer la précision de la localisation et de la cartographie.
Les algorithmes SLAM traitent les données entrantes pour mettre à jour la carte et la position de l'agent en continu. Cela implique des calculs mathématiques complexes, y compris des techniques de filtrage et d'optimisation.
Qu'est-ce que le Real Time Kinematic ?
Le Real-Time Kinematic (RTK) est une technique de navigation par satellite précise utilisée pour améliorer la précision des données de position dérivées des mesures du système mondial de navigation par satellite (GNSS). Il est largement utilisé dans des applications telles que la topographie, l'agriculture et la navigation de véhicules autonomes.
En utilisant une station de base qui reçoit les signaux GNSS et calcule sa position avec une grande précision. Ensuite, elle transmet les données de correction à un ou plusieurs récepteurs mobiles (rovers) en temps réel. Les rovers utilisent ces données pour ajuster leurs lectures GNSS, améliorant ainsi leur précision de position.
Le RTK fournit une précision au centimètre près en corrigeant les signaux GNSS en temps réel. Ceci est nettement plus précis que le positionnement GNSS standard, qui offre généralement une précision de quelques mètres.
Les données de correction de la station de base sont envoyées aux rovers via diverses méthodes de communication, telles que la radio, les réseaux cellulaires ou Internet. Cette communication en temps réel est essentielle pour maintenir la précision pendant les opérations dynamiques.
Qu'est-ce que le Precise Point Positioning ?
Le Precise Point Positioning (PPP) est une technique de navigation par satellite qui offre un positionnement de haute précision en corrigeant les erreurs de signal satellite. Contrairement aux méthodes GNSS traditionnelles, qui reposent souvent sur des stations de référence au sol (comme dans le RTK), le PPP utilise des données satellites mondiales et des algorithmes avancés pour fournir des informations de localisation précises.
Le PPP fonctionne partout dans le monde sans avoir besoin de stations de référence locales. Cela le rend adapté aux applications dans des environnements éloignés ou difficiles où l'infrastructure au sol est inexistante. En utilisant des données précises d'orbite et d'horloge satellite, ainsi que des corrections pour les effets atmosphériques et multivoies, le PPP minimise les erreurs GNSS courantes et peut atteindre une précision au centimètre près.
Bien que le PPP puisse être utilisé pour le positionnement post-traité, qui implique l'analyse des données collectées après coup, il peut également fournir des solutions de positionnement en temps réel. Le PPP en temps réel (RTPPP) est de plus en plus disponible, ce qui permet aux utilisateurs de recevoir des corrections et de déterminer leur position en temps réel.
Qu'est-ce qu'une horloge temps réel ?
Une horloge temps réel (RTC) est un dispositif électronique conçu pour suivre l'heure et la date actuelles, même lorsqu'il est éteint. Largement utilisées dans les applications nécessitant une tenue à jour précise de l'heure, les RTC remplissent plusieurs fonctions clés.
Premièrement, ils maintiennent un compte précis des secondes, des minutes, des heures, des jours, des mois et des années, intégrant souvent des calculs d’années bissextiles et de jours de la semaine pour une précision à long terme. Les RTC fonctionnent avec une faible puissance et peuvent fonctionner sur batterie de secours, ce qui leur permet de continuer à fonctionner en cas de panne de courant. Ils fournissent également des horodatages pour les entrées de données et les journaux, garantissant ainsi une documentation précise.
De plus, les RTC peuvent déclencher des opérations planifiées, permettant aux systèmes de sortir des états de faible consommation d'énergie ou d'effectuer des tâches à des heures spécifiées. Ils jouent un rôle crucial dans la synchronisation de plusieurs appareils (par exemple, GNSS/INS), garantissant qu'ils fonctionnent de manière cohérente.
Les RTC font partie intégrante de divers appareils, des ordinateurs et équipements industriels aux appareils IoT, améliorant ainsi la fonctionnalité et assurant une gestion fiable du temps dans de multiples applications.