
NED(北-东-地)坐标系是导航和惯性测量中广泛使用的参考系统。
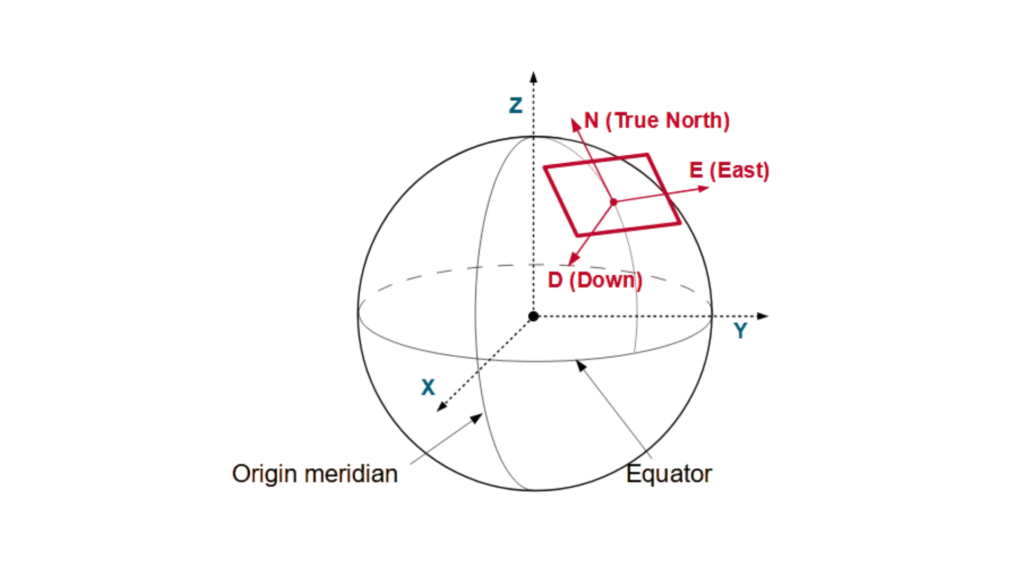
北-东-地 (NED) 坐标系用作局部参考系,由其 ECEF 坐标定义。通常,它保持固定在车辆或平台上,并随本体坐标系移动。该坐标系将北轴和东轴定位在地球表面与其当前位置相切的平面上,基于 WGS84 椭球模型。
它由三个正交轴组成:北轴指向真北,下轴延伸到地球内部(与局部向上方向相反),东轴通过指向东方(垂直于北方)来完成右手坐标系。
类似地,车辆或平台可以具有本地连接的“东-北-上 (ENU)”坐标系,并随系统一起移动。与 NED 坐标系不同,ENU 坐标系以不同的方式定向其轴:北轴仍然指向正北,但上轴从地球内部延伸出来,而东轴通过指向东方来保持其右手系统对齐方式。
这种右手坐标系通过与自然运动方向对齐,简化了飞机、船舶和自动驾驶车辆的计算。
NED应用使用
无人机依靠自动驾驶系统来计算其在 NED 坐标框架内的轨迹。当无人机向北飞行时,其位置在北方方向上增加。相反,当无人机上升时,其向下坐标值减小,因为向下为正方向。
相反,船舶的 INS(惯性导航系统) 通过跟踪其相对于 NED 坐标系的运动来发挥作用。当船只向东移动时,其东坐标增加。相反,当船只下潜时,其向下坐标上升。
一辆自动驾驶汽车利用 NED 坐标系来确定其位置。车辆的北方坐标随着其向北移动而增加,而地形中的颠簸或凹陷会导致向下值的变化。
精确制导武器依靠 NED 坐标系来调整其轨迹。当导弹向其目标下降时,向下坐标增加,从而确保精确瞄准。
AUV(自主水下航行器)利用 NED 坐标系进行导航。当 AUV 在东北方向移动时,北方和东方坐标都会增加,而深度的变化会影响向下坐标。
开发 NED 系统的目的是使运动与地球的自然方向对齐,从而简化导航。工程师、飞行员和科学家利用该系统来提高定位、制导和控制应用的精度。