惯性导航系统 (INS),也称为 INS,是一种导航设备,可提供横摇、纵倾、航向、位置和速度。这种复杂的技术可在不依赖外部参考的情况下确定物体的位置、方向和速度。
这种独立的导航解决方案在各种应用中至关重要,从航空航天和国防到机器人技术和自动驾驶车辆。
什么是惯性导航系统 (INS)?
惯性导航系统 (INS) 是一种导航技术,它使用运动传感器根据物体的初始起点计算其位置、速度和方向。与 GPS 等基于卫星的系统不同,INS 不依赖于外部信号,而是使用内部传感器来跟踪运动随时间的变化。这使得 INS 在外部信号不可用或不可靠的环境中特别有用。
主要特点
1 – 独立自主: 独立于外部导航辅助设备运行,使其适用于卫星可见性差或无卫星可见性的区域的应用。
2 – 高精度: 通过整合运动传感器的数据,提供精确的位置和姿态测量。
3 – 实时数据: 提供关于物体位置和姿态的持续更新,这对于动态和快节奏的环境至关重要。
INS 背后的技术
惯性导航系统依赖于多种核心技术来提供准确的导航数据。这些技术包括先进的传感器和计算算法,它们协同工作以跟踪物体的运动。以下是 INS 中使用的关键技术的详细介绍:
1- 陀螺仪
陀螺仪是 INS 的重要组成部分,用于测量不同轴上的角速度或旋转速率。
- 环形激光陀螺仪 (RLG):利用激光束高精度地测量旋转。RLG 以其低漂移和长期稳定性而闻名。
光纤陀螺仪 (FOG):利用通过光纤传播的光的干涉来测量旋转运动。FOG 提供卓越的精度和最小的偏置不稳定性。
2 – 加速度计
加速度计测量不同轴上的加速度,并与陀螺仪协同工作,以确定速度和方向的变化。
- 微机电系统 (MEMS) 加速度计结构紧凑且经济高效,可为许多 INS 应用提供可靠的性能。
- 提供更高的精度和稳定性,这对于精度至关重要的高端 INS 应用至关重要。
3 – 计算算法
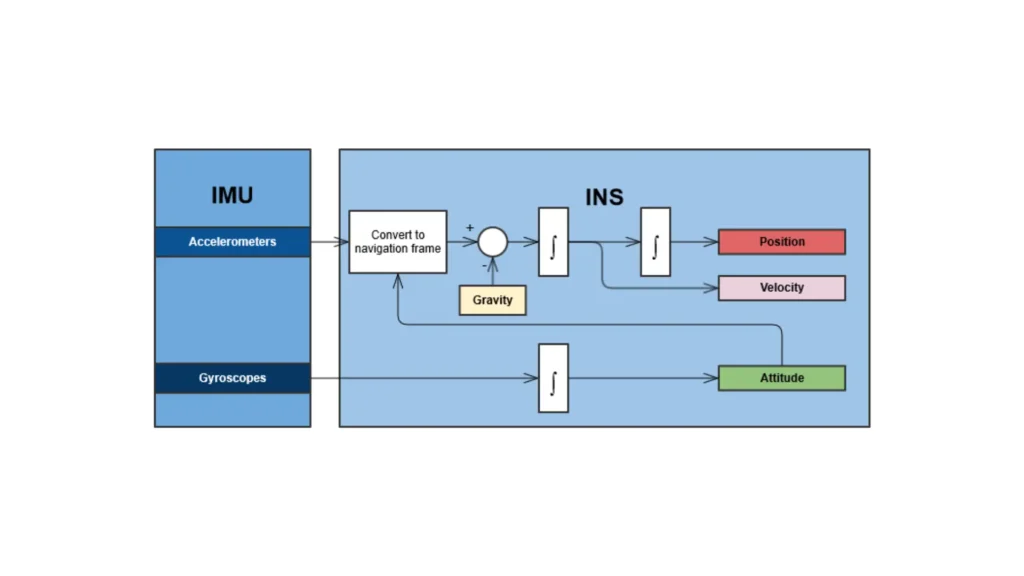
计算算法处理来自陀螺仪和加速度计的数据,以计算位置、速度和方向。
- 集成算法:集成加速度数据以确定速度和位置。这些算法考虑到初始条件并且不断更新导航数据。
- 误差校正算法:解决并纠正传感器测量中的偏差和漂移,以提高准确性和可靠性。
INS 的应用
惯性导航系统用于需要精确导航和定位的各个行业和应用中。以下是一些值得注意的示例:
在航空航天工业中,INS 为飞机导航提供精确的数据,尤其是在 GPS 信号可能较弱或不可用的飞行阶段。它还有助于航天器导航和控制,包括卫星定位和星际任务。
在国防和军事应用中,INS 确保导弹的精确瞄准和制导,这对于有效和可靠的打击能力至关重要。它还增强了军事地面车辆(包括坦克和装甲运兵车)的导航和作战效能。我们的产品系列均符合 MIL-STD-461、MIL-STD-1275 和 MIL-STD-810 标准。此外,它们没有出口限制,这使得 SBG Systems 的大多数解决方案都是 ITAR Free。
在自动驾驶车辆中,INS 为自动驾驶汽车提供关键的导航数据,帮助它们即使在 GPS 可用性有限的环境中也能保持准确的定位和方向。它还支持无人机实现精确的飞行控制和导航,确保在各种条件下稳定运行。
在机器人技术中,INS 通过提供准确的位置和方向数据,帮助在从工业自动化到勘探任务的复杂环境中进行导航。它还使监视机器人能够在监控和检查任务期间保持精确的定位和运动控制。
惯性导航系统 (INS) 在现代导航和定位技术中发挥着至关重要的作用。它们提供精确、可靠的数据,而无需依赖外部参考。
INS 使用陀螺仪、加速度计和计算算法等先进技术,不断更新位置、速度和方向。
INS 服务于各个行业,包括航空航天、国防、自动驾驶车辆和机器人技术。它的多功能性在高风险和日常场景中都很明显。
随着技术的进步,INS 的功能和应用将继续扩展。这种增长将满足对导航和定位不断变化的需求。