
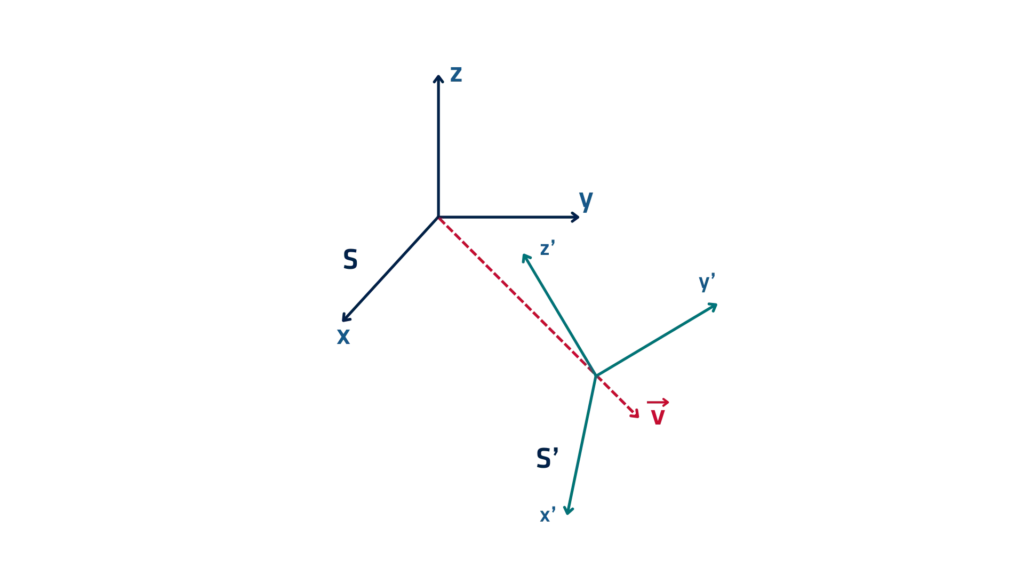
惯性参考系是一个坐标系,在该坐标系中,物体遵循牛顿运动定律,而无需考虑虚构力或外力。换句话说,它是一个非加速坐标系——无论是静止还是以恒定速度移动——其中物体保持静止或继续匀速运动,除非受到外力的作用。科学家和工程师依靠惯性系来准确分析空间、航空、海洋和机器人系统中的运动。
定义特征
惯性系不加速或旋转。这种稳定性使其非常适合应用牛顿第二定律 F = ma,而无需引入科里奥利力或离心力等校正力。例如,地球大气层以外的空间可以非常近似于惯性系,因为那里几乎没有重力扰动或旋转影响。这使其非常适合航天器动力学和卫星运动建模。
在太空任务中,工程师使用惯性参考系来计算航天器的轨迹。当卫星发射时,任务控制中心在惯性系中定义其初始位置和速度。当卫星移动时,它会继续沿其预测的路径移动,除非推进器施加力。
另一个例子是在飞机导航中。虽然由于地球的旋转,地球表面不是一个完美的惯性系,但喷气式飞机和导弹上的高精度惯性导航系统 (INS)在短时间内近似于惯性系内的运动。这使得这些系统能够在没有 GPS 的情况下提供准确的位置和速度数据。
在水下导航过程中,潜艇通常在没有外部信号的情况下运行。它们的 INS 基于惯性系假设来估计位置,使用加速度计和陀螺仪来跟踪随时间的运动。
在机器人技术中,工程师在虚拟环境中使用惯性系来模拟机器人运动。通过忽略摩擦或外部干扰,他们可以准确地建模和优化路径规划和控制算法。
局限性与修正
虽然由于地球的旋转和重力,地球上不存在真正的惯性系,但科学家出于实际目的使用伪惯性系。他们使用参考数据(例如,INS/GNSS 或星跟踪器)进行校正,以保持长期测量的准确性。
惯性参考系是理解和预测运动的基础。通过假设一个稳定的、无力的环境,工程师可以跨各种高级应用设计可靠的导航系统、飞行路径和机器人控制。