
陀螺仪是一种测量相对于惯性系的旋转速率的传感器。因此,它会捕获旋转时方向的所有后续变化。此外,由于地球坐标系本身也在旋转,因此放置在地面的陀螺仪也会检测到地球的旋转速率——大约每小时 15 度。陀螺仪通常以度/秒 (°/s) 或弧度/秒 (rad/s) 为单位表示输出。
它是如何工作的?
在实际应用中,系统以高频率积分旋转速率,以高精度确定传感器方向。因此,该原理构成了所有惯性传感器的基础,包括垂直陀螺仪、姿态和航向参考系统 (AHRS)、运动参考单元 (MRU) 和惯性导航系统 (INS)。
此外,这些在 INS 框架内确定位置和速度方面起着关键作用。此外,性能最高的陀螺仪(通常是闭环光纤陀螺仪 (FOG))直接测量地球的自转,而无需进行偏差估计。因此,这些传感器无需依赖任何外部参考即可确定航向,这种功能称为陀螺寻北。但是,也存在其他确定航向的技术,这有助于减少对该技术的严格约束。
陀螺仪中的科里奥利效应和萨格纳克效应
关于其工作原理,SBG Systems 陀螺仪利用两种核心物理效应来测量旋转:科里奥利效应和萨格纳克效应。具体而言,MEMS 陀螺仪使用科里奥利效应。当校准质量在 X 方向上振动时,绕垂直 Z 轴的旋转会产生一个力,该力会导致沿 Y 轴的运动。
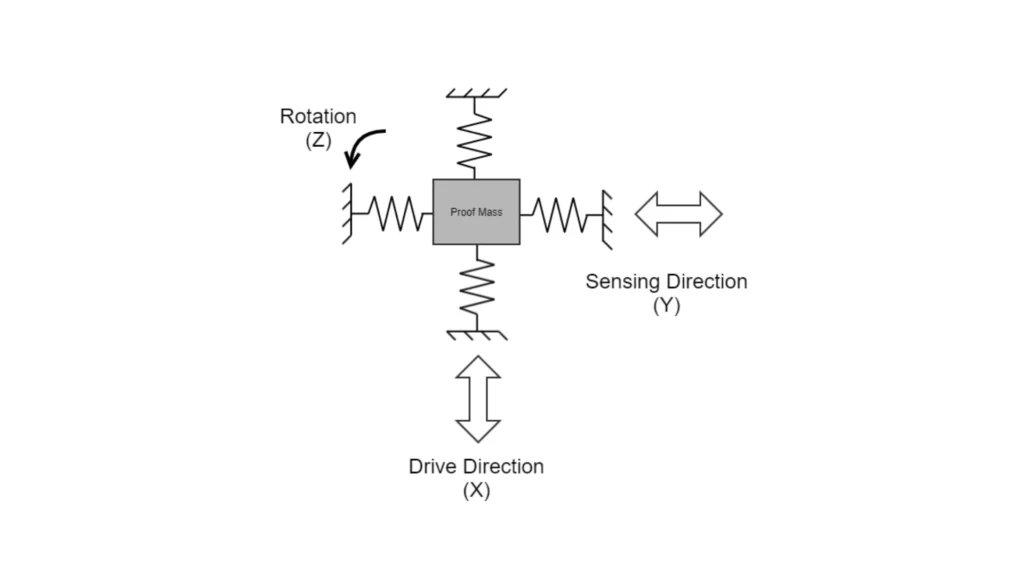
因此,一些MEMS 架构实现了这一原理,通常使用振动梁或环。值得注意的是,这些陀螺仪的实际性能因 MEMS 元件尺寸和质量、传感器封装以及机械和信号处理技术等因素而异。
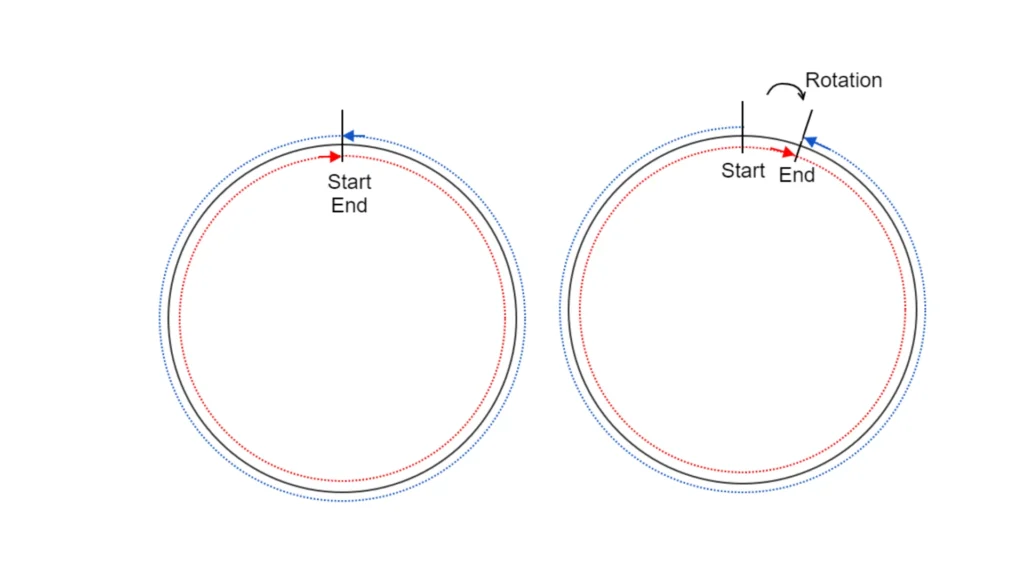
诸如 FOG 等光学陀螺仪,采用萨格纳克效应来测量旋转。在这种方法中,两个光源以相反的方向环绕——一个顺时针,另一个逆时针。当没有旋转时,光波同时到达;然而,在旋转期间,一条路径延长而另一条路径缩短。因此,这会产生干涉,可以通过测量来推断角速度。
陀螺仪在惯性导航中的应用
这些原理共同使陀螺仪能够在各种应用中提供精确可靠的运动数据。
航空
在航空领域,这些系统对于飞机导航和稳定性至关重要。它们用于以下系统:
- 姿态指示器: 这些仪器显示飞机相对于地平线的姿态,帮助飞行员保持正确的俯仰和滚转角度。
- 自动驾驶仪系统:陀螺仪向自动驾驶仪系统提供反馈,从而可以自动控制飞机的航向精度、高度和航线。
- 惯性导航系统 (INS):INS 依靠陀螺仪来跟踪飞机的运动和方向,即使在 GPS 信号不可用时也能提供准确的定位信息。
海上导航
关于海上导航,陀螺仪有助于维持船舶和潜艇的稳定性和航向:
- 陀螺罗经: 陀螺罗经提供精确的定向信息,独立于地球磁场,帮助导航员保持稳定的航向。
- 稳定系统使用这些传感器来减少横摇和纵倾,从而提高乘客的舒适度并确保安全。
太空
对于航天器和卫星,陀螺仪对于定向和控制至关重要:
- 姿态控制系统:陀螺仪通过提供旋转运动的精确测量来帮助控制航天器的方向,这对于对接、定位和机动等任务至关重要。
- 惯性测量单元 (IMU):IMU(包括陀螺仪)提供导航和稳定功能,以确保在空间中的精确定位和控制。