
传感器坐标系或本体坐标系是一个局部参考系,它随传感器或平台(如无人机、车辆、机器人或导弹)一起移动。它定义了相对于传感器物理结构的方向和运动。工程师使用本体坐标系直接从传感器的角度表达加速度、角速率和速度等测量值。
传感器(本体)坐标系(通常称为本体坐标系或车辆坐标系)是用作固定到移动平台的参考系,例如无人机、汽车、导弹或水下航行器。工程师使用此坐标系来描述平台相对于自身的运动和方向,这对于导航、控制和传感器融合至关重要。
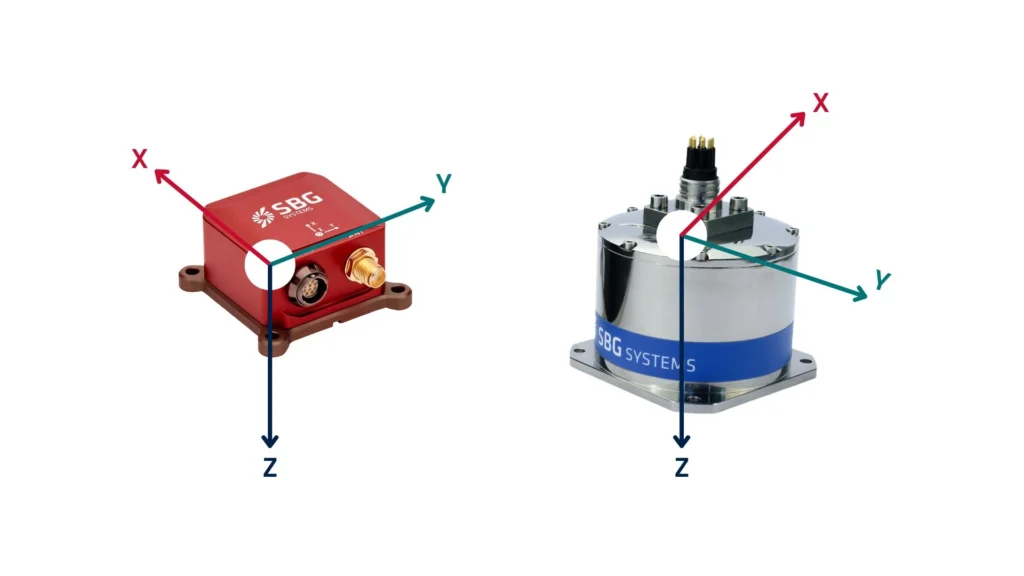
在大多数应用中,用户将 IMU、GNSS 接收器或 AHRS 单元等传感器直接安装在车辆上。这些传感器以其自身的坐标系报告数据,该坐标系通常与本体坐标系一致。它由形成右手坐标系的三个正交轴组成:
- X轴指向前方,即运动方向或传感器头部方向。
- Y轴指向右侧(对于船舶或飞行器系统,则为右舷)。
- Z轴指向下方或相对于传感器底座向下,具体取决于应用。
这种固定的方向使系统能够测量其自身空间中的移动或旋转方式,而不是相对于地球。
车身框架应用示例
无人机的 IMU 负责测量其自身参考系中的加速度和旋转。当无人机向前俯仰时,它会感知到绕其 Y 轴的角速度。该系统将此数据传输到飞行控制器,使无人机能够稳定并精确地执行飞行指令。例如,无人机的自动驾驶系统利用本体坐标系中的传感器数据来稳定飞行并执行偏航、俯仰和横滚等动作。该系统直接解释运动,将其表达为相对于无人机自身坐标系的前向、横向和垂直运动。
另一方面,自动驾驶汽车检测其在本体坐标系中沿 X(前向)、Y(横向)和 Z(垂直)轴的线性加速度。此功能使车辆能够调整其速度、保持车道控制并响应地形变化。该坐标系有助于解释激光雷达、雷达和惯性数据。汽车的控制系统使用这些读数,根据其自身的方向做出实时驾驶决策。
导弹的导航系统利用本体坐标系进行方向跟踪。当它进行机动时,机载传感器会检测到本体固定轴中的旋转速率和加速度,从而实现精确的航向校正。导弹的机载导航系统利用本体坐标系来跟踪加速度和角速度,使其能够根据其当前位置和坐标系的方向调整其轨迹和方向。
机器人手臂采用本体坐标系来计算关节运动和末端执行器位置。每个电机的姿态和方向都在此局部坐标系中测量,以确保实时控制。
传感器对准挑战
在实际应用中,传感器并不总是与机体坐标系完全对齐。为了解决这个问题,工程师经常采用坐标系旋转校正,使传感器的坐标系与车辆的机体坐标系对齐。这确保了与位置、速度和方向相关的计算的精确读数。这对于任何移动和感知其环境的系统都是至关重要的。它在实时导航、控制和稳定中起着至关重要的作用,使其在航空航天、国防、汽车和机器人系统中必不可少。
请告诉我们您的项目