
扩展卡尔曼滤波器 (Extended Kalman Filter, EKF) 是一种强大的工具,用于导航和控制系统,以估计随时间演变的系统状态。它是卡尔曼滤波器的扩展,旨在处理非线性系统,这使其对于变量之间关系非线性的应用至关重要。
这种强大的算法用于根据嘈杂的传感器测量值估计动态系统的状态。它以标准卡尔曼滤波器为基础,通过适应非线性系统(在实际导航场景中很常见)来实现。虽然传统的卡尔曼滤波器假设线性动态和高斯噪声,但 EKF 通过围绕当前估计线性化非线性系统来克服这些限制。这使其能够在更复杂的现实环境中有效运行。
扩展卡尔曼滤波器的基本原理
EKF 的核心是持续更新状态向量——一组描述系统当前状态的变量,例如导航环境中的位置、速度和方向。它依赖于过程模型来预测状态随时间的变化,包括系统动力学和控制输入。同时,测量模型将传入的传感器数据与估计的状态联系起来,协方差矩阵表示预测和观测中的不确定性,帮助 EKF 平衡模型估计和传感器输入之间的置信度。
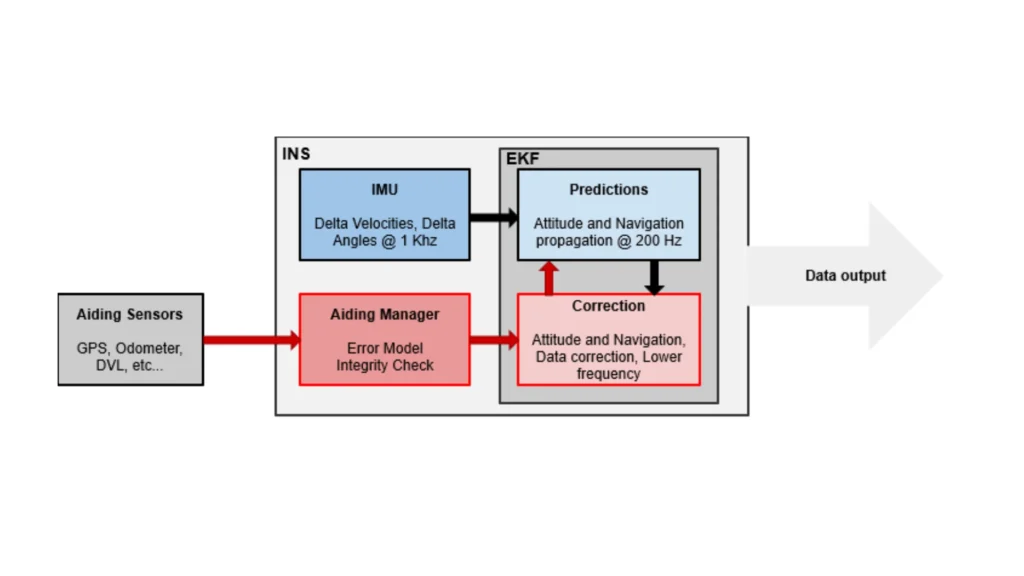
该滤波器在两个主要阶段运行:预测和更新。在预测阶段,它使用过程模型来预测下一个状态,并通过更新协方差矩阵来预测相关的不确定性。为了管理非线性,EKF 使用雅可比矩阵(一种数学表示,可近似表示系统在当前估计值附近的表现)线性化过程模型和测量模型。
在更新阶段,EKF 结合新的传感器测量值来优化其预测。它计算卡尔曼增益,该增益确定为新测量值分配多少权重,而不是预测状态。该增益使 EKF 能够相应地调整状态估计,并更新协方差以反映测量后不确定性的降低。
EKF 在现代应用中的应用
EKF 广泛应用于现代导航系统中,因为它能够在存在噪声和系统复杂性的情况下提供准确的状态估计。例如,惯性导航系统 (INS) 依赖于加速度计和陀螺仪,这些器件容易出现漂移和噪声。EKF 结合传感器数据,为动态平台提供稳定的位置、速度和方向估计。这些估计对于自动驾驶汽车、飞机和其他移动系统的可靠运行至关重要。
在机器人和自主系统中,EKF实现了强大的定位和建图。机器人使用LiDAR或相机等传感器来估计位置,并使用扩展卡尔曼滤波器(EKF)更新地图。这实现了实时建图和定位,支持在不熟悉或动态环境中安全自主运行。
在航空航天和国防领域,EKF 在制导和跟踪系统中发挥着至关重要的作用。它使飞机、导弹和航天器即使在非线性运动条件下也能保持精确的位置和轨迹。当暴露于可能降低导航精度的外部干扰时,EKF 仍能可靠地运行。
EKF背后的技术包括几个关键组件。雅可比矩阵支持线性化过程,而传感器融合集成了来自多个来源的数据,以确保弹性和准确性。为了支持实时操作,EKF依赖于用于矩阵运算、协方差更新和测量集成的有效计算算法。
总之,扩展卡尔曼滤波器 (EKF) 是高级导航系统中必不可少的工具。 通过扩展卡尔曼滤波器来处理非线性系统,您可以获得准确的实时状态估计。 它支持广泛的应用,包括机器人、汽车 ADAS、航空航天和国防系统。 掌握 EKF 的原理和技术是开发复杂和动态环境中高性能导航解决方案的关键。