在安装惯性导航系统 (INS)时,INS 和 GNSS 天线之间,以及 INS 和其他传感器(如里程计或 DVL)之间的精确杆臂估计提出了重大挑战。
什么是杆臂?
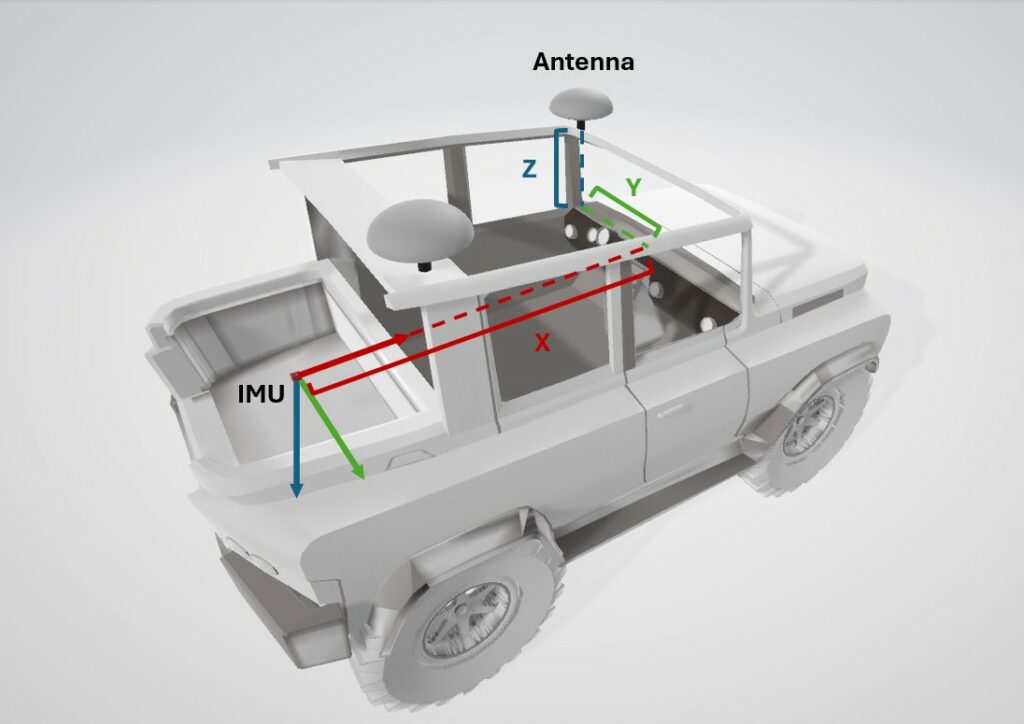
杆臂是 GNSS 天线或平台上其他参考点相对于 INS 参考点的位置偏移,通常表示为 3D 矢量 (X, Y, Z)。
精确的杆臂估计在 GNSS/INS 融合中至关重要,因为 GNSS 提供天线的位置,而 INS 计算的姿态信息在传感器本身内被引用,该传感器安装在不同的位置。
天线位置和 INS 位置之间的这种偏移意味着这些点在运动过程中会经历不同的动态。
传统杠杆臂估算中的挑战
即使是杠杆臂估计中的微小误差也可能导致显着的位置不准确。 传统上,这需要仔细的手动测量,但在实践中存在若干挑战:
- 人为误差: 测量中的微小偏差会导致定位计算中的累积误差。
- 难以接近的安装点: IMU 和 GNSS 天线可能安装在难以到达的位置,从而使精确测量变得困难。
- 耗时的过程:确保高精度需要多次检查和验证,从而增加了安装过程的额外时间。
自动化解决方案:Qinertia Lever Arm
为了简化此过程并提高效率和精度,我们推出了 Qinertia-leverArm – 一款免费的杆臂估计工具,旨在自动重新估计杆臂。它无需进行仔细的手动测量,从而允许 SBG Systems 的用户以粗略的估计值安装其 IMU,并在以后使用该工具对其进行优化。
主要优势
Qinertia Lever Arm 提供了多项优势,使其成为杆臂估计的颠覆性解决方案。以下是使该解决方案脱颖而出的主要优势:
- 免费且可访问:所有拥有 MySBG 帐户的用户均可使用,无需额外费用。
- 与所有 SBG 产品兼容。
- 无需手动精度:从近似测量开始,让 Qinertia-leverArm 对其进行优化。
- 以最小的努力提高定位精度:使用PPK数据动态估计杆臂。
- 借助 Qinertia-leverArm,用户可以确保更准确的杆臂值,从而在无需手动调整的情况下提高定位精度。
观看下面的视频,了解完整的演练。

开始使用 Qinertia Lever Arm
准备好亲自试用我们的杆臂估计工具了吗?在您的 MySBG 帐户的“下载”部分下,下载最新版本的 Qinertia。安装完成后,只需在启动 Qinertia lever-Arm 工具时使用您的 MySBG 帐户登录即可。
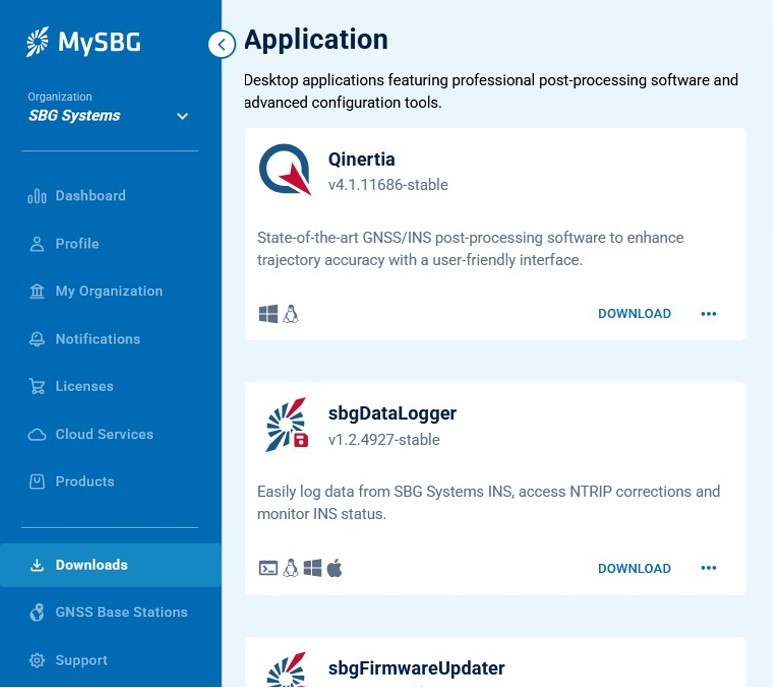
如果您还没有 MySBG 帐户,请访问 my.sbg-systems.com 进行注册并开始使用!