自动驾驶车辆工程:苏黎世无人机赛车队使用 Ellipse-D 进行导航
苏黎世无人机赛车队已经解决了关键的位置漂移挑战,这些挑战以前使他们的无人驾驶操作成为不可能。自动驾驶车辆工程的这一突破现在使该团队能够开始他们在著名的大学生方程式比赛中参加汽车越野赛的旅程。
Ellipse-D 允许我们获得汽车在赛道上的绝对位置。准确的位置对于我们的无人驾驶系统的运行至关重要。我们最大的问题之一是位置随时间漂移。借助 Ellipse-D,我们将能够应对汽车越野赛,这在以前对我们来说是不可能的。 | Finn Scheller,苏黎世无人机赛车队 C 负责人。

团队在自动驾驶车辆工程方面的背景
苏黎世 UAS 赛车队 (ZUR) 是一支充满激情的大学生方程式车队,来自瑞士温特图尔的苏黎世应用科技大学。这个雄心勃勃的学生协会成立于 2019 年,参加 世界上最大的工程竞赛 大学生方程式,制造电动和自动驾驶汽车与来自全球各地的大学竞争。

该团队已发展到超过 70 名积极进取的学生,他们来自不同的学位课程,都为了优化赛车性能和推进自动驾驶车辆工程这一共同目标而团结在一起。
大学生方程式汽车大赛
国际上备受推崇的大学生方程式汽车大赛 (Formula Student) 挑战学生团队设计和制造方程式赛车,并在包括工程设计、成本分析和动态赛道赛事等多个学科中展开竞争。

车辆:ZUR04
ZUR 的旅程始于 2021 年的第一辆功能车,自 2022 年以来成功参与了电动汽车 (EV) 活动。他们的无人驾驶赛车 ZUR04 代表了学生自主车辆工程的尖端水平,配备四个电动轮毂电机,总功率为 140 kW,使其能够在短短 2.5 秒内从 0 加速到 100 公里/小时。
该车辆专为人工驾驶和自主赛车而设计,其性能可与 pro 赛车相媲美。其无人驾驶系统目前正处于测试阶段。
苏黎世UAS赛车队的技术要求
ZUR 需要一种先进的惯性导航系统 (INS),该系统可以与他们的自动驾驶赛车系统无缝集成,同时满足高速比赛的苛刻要求。
他们面临的主要挑战是在赛车的动态环境中实现可靠的定位,在这种环境中,传统的定位系统通常会因位置随时间漂移而失效。
该系统必须提供绝对位置精度,这对于他们的无人驾驶系统操作至关重要,特别是对于具有挑战性的汽车越野赛,该比赛需要通过复杂的锥形排列进行精确导航。
因此,简而言之,这些是关键问题:
- 位置漂移: 随时间推移的显著漂移会阻止精确定位。
- Autocross 限制: 由于定位问题,无法参加 autocross 比赛。
- 有限的数据洞察: 车辆动力学数据不足,无法进行软件优化。

而这些是核心要求:
- 精确定位: 需要在轨道上的绝对位置。
- ROS 集成: 与现有基于 ROS 的自主系统无缝集成。
- 紧凑型解决方案: 重量轻的设备,具有良好的功率重量比。
- 开放文档: 易于访问的技术资源。
- 高动态: 能够处理极限赛车条件。
在评估了 ZUR 的情况后,我们推荐了我们的Ellipse-D,这是一种惯性导航系统 (INS),专为精度和可靠性至关重要的苛刻应用而设计。
我们的自动驾驶赛车解决方案:Ellipse-D
Ellipse-D 是最小的双天线 RTK GNSS/INS 系统,可为动态赛车应用提供厘米级定位和精确的航向精度。
这项技术代表了自动驾驶车辆工程解决方案的重大进步,为团队提供:
- 高精度: 厘米级定位精度对于自主赛车中精确的赛道导航和避障至关重要。
- 双天线航向精度:在电气马达和电子系统产生的磁干扰会影响传统罗盘系统的具有挑战性的环境中,具有卓越的性能。
- 赛车合规性: 紧凑的设计和坚固的结构,非常适合高动态赛车应用,具有出色的抗振动和耐高温性。

最后,ZUR 实现其愿景的第四个关键点是ROS集成,用他们自己的话说,它与其他功能相结合,使整个软件包成为市场上最具成本效益的解决方案:
“对我们来说,主要的卖点是开源文档和接口库。通过 ROS 提供的全面支持对我们来说也是一个很大的优势,因为我们的汽车已经在运行 ROS。因此,集成非常容易。我们也很感谢 SBG Systems 对我们团队的支持,通过他们的产品来提高我们的性能。与其他此类产品的供应商相比,SBG Systems 为我们提供了最高的性价比,” Scheller 强调说。
先进的集成和性能
集成过程证明了 Ellipse-D 的多功能性和 SBG Systems 支持方法的有效性。该系统连接到 RaspberryPi 和 NVIDIA Jetson 计算平台,同时利用 sbgECom 库和 ROS2 软件包进行全面的数据访问和处理。
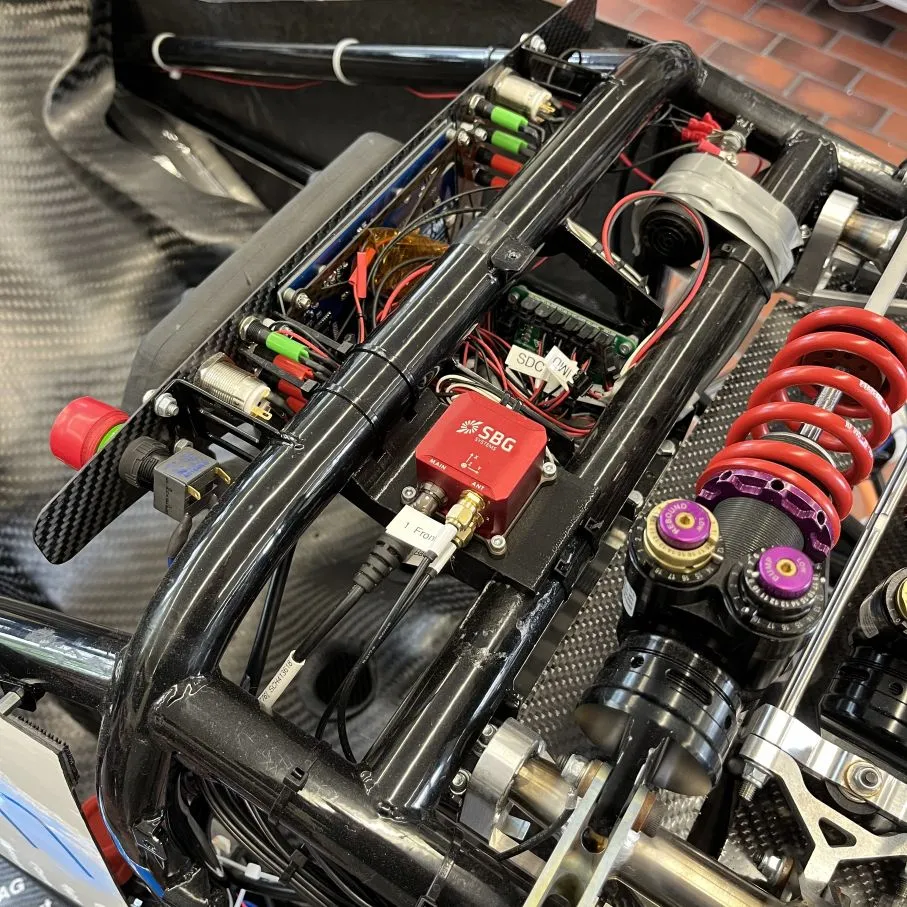
这种架构可以在整个自主系统中实现实时导航数据分发,同时保持自定义算法开发所需的灵活性。
该团队还在利用 Ellipse-D 的功能来开发利用 INS 数据的高级扭矩矢量算法。他们还构建了一个基于 GNSS RTK 的漫游车和基站,以提供精确的赛道地面实况。
除了将 INS 集成到他们的无人驾驶汽车 ZUR04 中(计划于今年夏天进行赛道测试)之外,该团队还将 INS 集成到他们新建的赛车 ZUR05 中。Ellipse-D 也将是下赛季无人驾驶汽车 ZUR06 的关键组件。
苏黎世UAS赛车队的前三名
ZUR 强调了他们喜欢与 SBG Systems 合作的三个突出方面。
- 开源: 首先,他们赞赏与他们的教育使命和开发方法相一致的开源方法。透明的文档和接口库使学生能够根据其特定需求理解和修改系统,从而在自动驾驶汽车工程中提供宝贵的学习机会。
- 出色的文档: 该团队重视全面且公开的产品文档,这些文档简化了他们的集成过程。与许多提供有限技术细节的商业系统不同,SBG Systems 的方法能够快速理解和实施。
- 良好的沟通:最后,他们强调了出色的沟通和支持,并指出他们始终感到被倾听,并且收到了所有问题的答案。这种快速响应的支持对于在紧张的比赛截止日期内工作的学生团队来说至关重要。
结论
该实施解决了 ZUR 最关键的挑战:位置漂移,这之前阻止了他们参加自动越野赛。借助 Ellipse-D 的厘米级精度和双天线航向确定,该团队现在可以开始试运行,目标是在下个赛季(2026 年夏季)使用他们的下一代赛车进行无人驾驶比赛。

这种合作体现了行业与教育伙伴关系在推进自动驾驶车辆技术方面的力量。
“Ellipse 是进入 INS 系统的完美切入点。未来,我们计划结合我们新开发的基于以太网的车辆系统使用更强大的系统,” Scheller 总结道。
我们致力于支持像 ZUR 这样的学生团队,这表明了提供专业级导航技术如何使下一代工程师能够突破自动驾驶赛车领域可能性的界限。
Ellipse-D
Ellipse-D 是一款紧凑、高性能的 GNSS 辅助惯性导航系统,可提供可靠的姿态、位置和升沉测量。
它将 IMU 与双频 GNSS 接收器相结合,并使用传感器融合算法在具有挑战性的环境中提供精确定位。
它提供双天线功能,可在静态条件下实现精确的航向精度。

请求 Ellipse-D 的报价
您有疑问吗?
欢迎访问我们的常见问题解答 (FAQ) 专区!在这里,您可以找到关于我们展示的应用的最常见问题的答案。如果您找不到您要查找的内容,请随时直接与我们联系!
自动驾驶汽车如何工作?
自动驾驶汽车是配备了复杂系统的车辆,这些系统使其能够在没有人为干预的情况下进行导航和控制。这些车辆使用自主驾驶传感器和算法相结合的方式来感知环境、做出决策和执行自动驾驶任务。 目标是实现完全自主,使车辆能够安全有效地处理驾驶的各个方面。
自动驾驶汽车依赖于一系列关键技术来感知周围环境。 这些包括:
- GNSS(全球导航卫星系统):用于获取自动驾驶汽车位置、速度和方向的实时更新。
- INS(惯性导航系统):在 GNSS 信号中断的情况下保持精度。它提供有关自动驾驶汽车位置、速度和方向的实时更新。
- LiDAR(激光探测与测距):使用激光束创建车辆环境的详细 3D 地图。 这项技术有助于汽车检测和测量周围的物体,包括其他车辆、行人和道路标志。
- 雷达(无线电探测和测距):利用无线电波探测物体的速度、距离和方向。雷达在恶劣天气条件下以及探测远距离物体时尤其有用。
- 相机:用于捕获有关车辆环境的视觉信息,包括车道标线、交通信号和道路标志。它们对于解释复杂的视觉线索和根据视觉数据做出决策至关重要。
车辆自动化的六个等级是什么?
美国汽车工程师学会 (SAE) 在其 J3016 标准中定义的自动驾驶汽车的 6 个级别描述了车辆的自动化程度。以下是详细分类:
- Level 0:无自动化。 警告或瞬间辅助,例如自动紧急制动或盲点警告,但没有持续的自动化。
- 1 级:驾驶员辅助。 用于支持的单一自动化系统,例如自适应巡航控制(保持速度和距离)或车道保持辅助。
- 2 级:部分自动化。 转向和加速/减速等系统的组合,但没有决策。
- Level 3:有条件自动化。 汽车在特定条件下(例如,高速公路驾驶)处理大多数驾驶任务。系统可以监控环境。
- 4 级:高度自动化。 汽车在预定义的场景中独立运行。在这些区域不需要驾驶员注意。
- Level 5:完全自动化。 车辆可以在人类驾驶员可以处理的每个环境中执行所有任务。可能不存在方向盘或踏板。
这些级别说明了从人工控制车辆到能够处理所有驾驶任务的完全自动驾驶系统的演变过程。
INS 是否接受来自外部辅助传感器的输入?
我们公司的惯性导航系统接受来自外部辅助传感器(如空速传感器、磁力计、里程计、DVL等)的输入。
这种集成使 INS 具有高度的通用性和可靠性,尤其是在 GNSS 受限的环境中。
这些外部传感器通过提供互补数据来增强 INS 的整体性能和精度。
IMU 和 INS 之间有什么区别?
惯性测量单元 (IMU) 和惯性导航系统 (INS) 之间的区别在于它们的功能和复杂性。
IMU(惯性测量单元)提供有关车辆线性加速度和角速度的原始数据,这些数据由加速度计和陀螺仪测量。它提供有关横滚、俯仰、偏航和运动的信息,但不计算位置或导航数据。IMU 专门设计用于中继有关运动和方向的基本数据,以进行外部处理以确定位置或速度。
另一方面,INS(惯性导航系统)将 IMU 数据与高级算法相结合,以计算车辆随时间推移的位置、速度和方向。它包含导航算法,如卡尔曼滤波,用于传感器融合和集成。INS 提供实时导航数据,包括位置、速度和方向,而无需依赖外部定位系统(如 GNSS)。
此导航系统通常用于需要全面导航解决方案的应用中,尤其是在 GNSS 受限的环境中,例如军用无人机、船舶和潜艇。
AHRS 和 INS 之间有什么区别?
姿态航向参考系统 (AHRS) 和惯性导航系统 (INS) 之间的主要区别在于它们的功能和提供的数据范围。
AHRS 提供方向信息,特别是车辆或设备的姿态(俯仰、横滚)和航向(偏航)。它通常使用陀螺仪、加速度计和磁力计等传感器的组合来计算和稳定方向。AHRS 输出三个轴(俯仰、横滚和偏航)中的角位置,使系统能够了解其在空间中的方向。它通常用于航空、无人机、机器人和船舶系统中,以提供准确的姿态和航向数据,这对于车辆控制和稳定至关重要。
INS 不仅提供姿态数据(如 AHRS),还可以跟踪车辆随时间推移的位置、速度和加速度。它使用惯性传感器来估计 3D 空间中的运动,而无需依赖 GNSS 等外部参考。它结合了 AHRS 中的传感器(陀螺仪、加速度计),但也可能包括更高级的算法,用于位置和速度跟踪,通常与 GNSS 等外部数据集成以提高精度。
总而言之,AHRS 侧重于方向(姿态和航向),而 INS 提供全套导航数据,包括位置、速度和方向。