Qinertia 杠杆臂 免费且与所有SBG产品兼容
在安装惯性导航系统 (INS) 时,INS 和 GNSS 天线之间,以及 INS 和其他传感器(如里程计或 DVL)之间的杠杆臂配置是一个真正的挑战。
为了简化此操作并提高效率和精度,我们提供 Qinertia 杠杆臂工具,这是一款免费的杠杆臂估计工具,旨在自动重新估计杠杆臂。它无需进行仔细的手动测量,从而允许 SBG Systems 的用户以粗略的估计值安装其 IMU,并在以后使用该工具对其进行优化。
立即试用!
使用 Qinertia 杠杆臂简化 SBG INS 设置
Qinertia 的杠杆臂估计工具旨在精确估计和优化机械安装参数,包括 GNSS 主天线和辅助天线杠杆臂,以及 DVL 或里程计杠杆臂。当精确的手动测量不切实际或难以获得时,这尤其有用。借助 Qinertia 杠杆臂,您可以获得更精确的杠杆臂值,从而提高定位精度,而无需进行手动调整。
为了获得最佳结果,强烈建议进行专门的数据采集会话,该会话具有足够的动态特性(例如八字形模式)和良好的开阔天空环境。该工具以松耦合方式将实时 GNSS 位置与 IMU 数据集成在一起,建议使用实时 GNSS RTK 以获得最佳性能。
Qinertia 杠杆臂可供所有拥有 MySBG 帐户的用户免费使用,并且与所有 SBG 产品完全兼容,从而使新的 Ellipse 更加完善,成为内置于高性能 INS 产品(如 Ekinox、Apogee、Navsight 和 Quanta 系列)中的实时机械估计模块的强大替代品。
探索 Qinertia 杠杆臂的全部优势。




什么是杆臂?
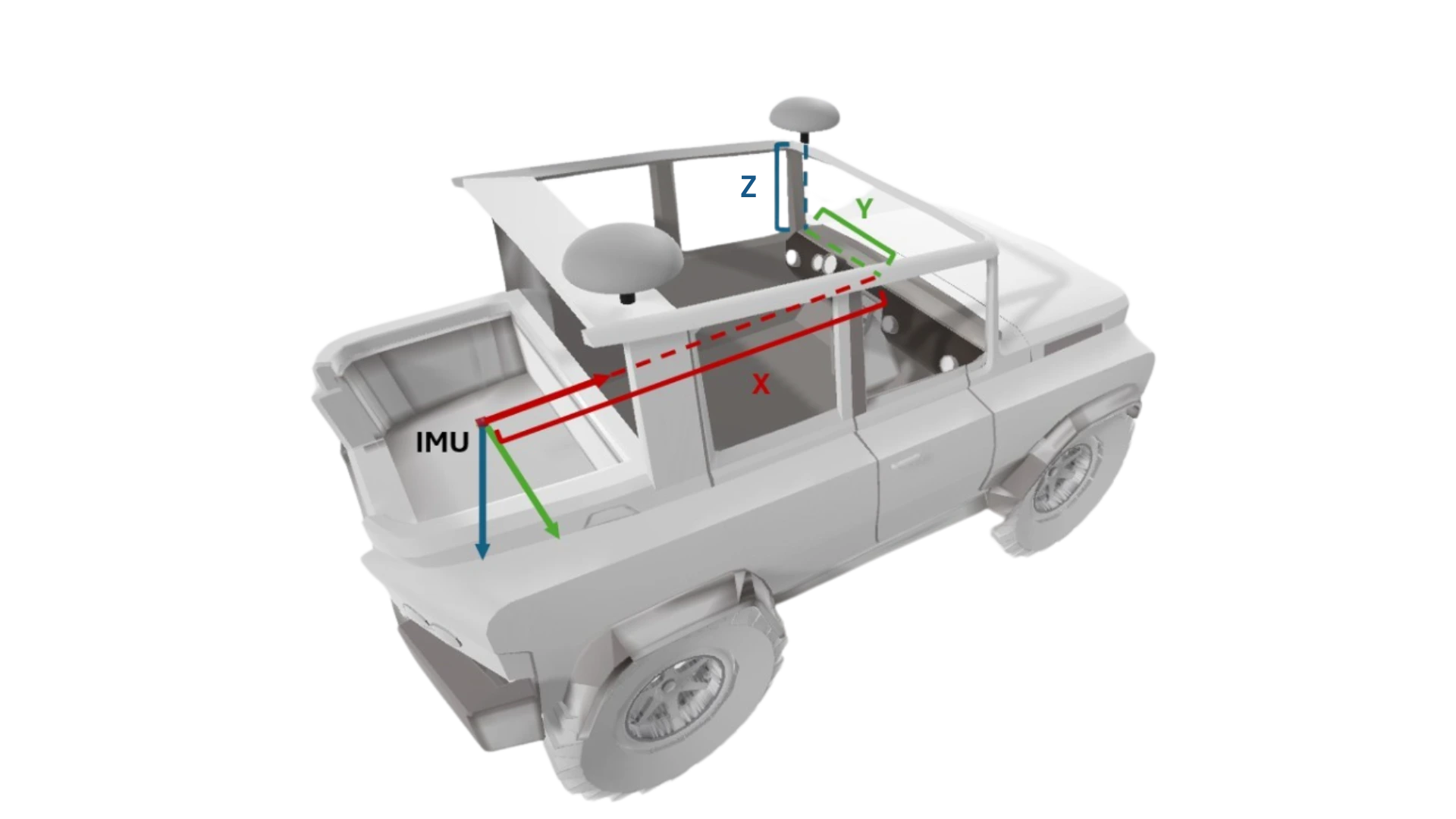
杠杆臂是 GNSS 天线或平台上其他参考点相对于 INS 参考点的位置偏移,通常表示为 3D 矢量 (X, Y, Z)。这在 GNSS/INS 融合中至关重要,因为 GNSS 提供天线的位置,而 INS 计算的姿态信息在传感器本身内被引用,该传感器安装在不同的位置。
天线位置和 INS 位置之间的这种偏移意味着这些点在运动过程中会经历不同的动态。
即使杠杆臂测量中的微小误差也会导致显着的定位不准确。传统上,这需要仔细的手动测量,但在实践中会带来一些挑战:
– 人为错误: 测量中的微小错位可能导致定位计算中的累积误差。
– 难以接近安装点: IMU 和 GNSS 天线可能安装在难以到达的位置,从而使精确测量变得困难。
– 耗时的过程: 确保高精度需要多次检查和验证,从而增加了安装过程的额外时间。
了解 Qinertia 的完整版本
使用这款全新的免费 Qinertia 杠杆臂工具,体验新一代 INS/GNSS 后处理软件。
深入了解 Qinertia 完整版本的众多功能。
