






Navsight Marine 用于水文应用领域的导航解决方案
Navsight Marine 集成了最新的 IMU 和 GNSS 技术,为水文测量师提供完整、强大且用户友好的运动和导航解决方案。
Navsight Marine 易于设置且用途广泛,可简化水文测量师在浅水和深水中的测量任务。
Navsight 是一个模块化解决方案,由不同的组件组成:一个处理单元、多种远程传感器选择、电缆和天线,以满足您的特定需求。
IMU 是主要的传感元件,也是最重要的性能驱动因素。如果 GNSS 条件良好并且您在浅水中工作,请选择 Ekinox 级 IMU。对于恶劣的条件,如 GNSS 环境不佳或极深的水域,请选择 Apogee 或 Horizon 级传感器,以确保最高的精度。
了解所有 Navsight Marine 的特性和应用。
Navsight Marine 功能
Navsight 是一款完整的惯性导航解决方案,专为测量行业量身定制,它结合了 SBG Systems 经过验证的惯性传感器、独有的先进算法和高性能 GNSS 技术,以及用户友好的设置。Navsight 旨在适应各种应用,通过三个不同的等级提供可扩展的性能。
Ekinox IMU 等级提供紧凑、低功耗且经济的选择,非常适合浅水测量。对于 GNSS 信号中断的严苛环境,Apogee IMU 等级可提供从浅水到深水的卓越性能。Horizon IMU 等级提供最高的性能,采用闭环光纤陀螺仪 (FOG),可确保超低的陀螺仪零偏,非常适合大型船只、高深度测量以及漂移最小的恶劣条件。
Navsight 还配备了一个机架式处理单元,可轻松集成到标准的 19 英寸机架中,并配备标准的 RJ-45 和 DB-9 连接器,以便快速设置。
Navisght Marine 在法国设计和制造,没有出口限制 (ITAR Free)。
了解 Navsight Marine 如何通过其多功能、高精度的解决方案提升您的水文测量能力。




我们的案例研究
探索真实世界的用例,了解我们的 Navsight Marine 如何提高性能、减少停机时间并提高运营效率。了解我们先进的传感器和直观的界面如何提供您在应用中脱颖而出所需的精度和控制。


我们的不同版本
比较我们最先进的用于导航、运动和纵摇传感的传感器系列。
完整的规格可在产品宣传册中找到,可根据要求提供。
| RTK 水平位置 | RTK 水平位置 0.01 m + 0.5 ppm | RTK 水平位置 0.01 m + 0.5 ppm | RTK 水平位置 0.01 m + 0.5 ppm |
|---|---|---|---|
| RTK 横滚/俯仰 | RTK 横滚/俯仰 0.015 ° | RTK 横滚/俯仰 0.008 ° | RTK 横滚/俯仰 0.007 ° |
| RTK 航向精度 | RTK 航向精度 0.02 ° | RTK 航向精度 0.01 ° | RTK 航向精度 0.01 ° |
| GNSS 接收器 | GNSS 接收器 内部大地测量双天线 | GNSS 接收器 内部大地测量双天线 | GNSS 接收器 内部大地测量双天线 |
| 重量 (g) | 重量 (g) 1 940 g | 重量 (g) 1 940 g | 重量 (g) 1 940 g |
| 尺寸(长x宽x高) | 尺寸(长x宽x高) 227 x 156 x 63 毫米 | 尺寸(长x宽x高) 227 x 156 x 63 毫米 | 尺寸(长x宽x高) 233 x 156 x 63 毫米 |
兼容性
Navsight Marine 文档和资源
Navsight Marine 附带全面的文档,旨在为用户在每个步骤提供支持。
从安装指南到高级配置和故障排除,我们清晰而详细的在线文档可确保顺利集成和操作。
附加产品与配件
通过探索我们多样化的应用,了解我们的测量员系统解决方案如何改变您的运营。借助我们的运动和导航传感器及软件,您可以访问最先进的技术,从而推动您所在领域的成功和创新。
加入我们,共同释放惯性导航和定位解决方案在各个行业的潜力。
Qinertia GNSS-INS


Navsight Marine 生产过程
了解每个 SBG Systems 产品背后的精度和专业知识。以下视频深入了解了我们如何精心设计、制造、校准和测试我们的高性能惯性导航系统。
从先进的工程到严格的质量控制,我们的生产过程确保每个产品都符合最高的可靠性和精度标准。
无论您是对技术感到好奇,还是有兴趣了解我们如何将创新解决方案变为现实,此视频都突出了我们对生产过程每一步都精益求精的承诺。

请求报价
他们在谈论我们
了解行业专业人士和客户在其项目中利用 Navsight Marine 的经验和评价。
他们的见解反映了我们产品的质量和性能,突出了其作为该领域值得信赖的解决方案的作用。
了解我们的创新技术如何改变他们的运营,提高生产力,并在各种应用中提供可靠的结果。
您有疑问吗?
欢迎访问我们的常见问题解答部分,在这里我们解答您关于我们尖端技术及其应用的最紧迫问题。在这里,您将找到关于产品特性、安装过程以及最佳实践的全面解答,从而最大限度地提升您使用 Navsight Marine 的体验。
在此处查找您的答案!
什么是波浪测量传感器?
波浪测量传感器是了解海洋动力学以及提高海上作业安全性和效率的重要工具。通过提供关于波浪状况的准确和及时的数据,它们有助于为航运和导航到环境保护等各个部门的决策提供信息。 波浪浮标是配备传感器的漂浮设备,用于测量波浪参数,如高度、周期和方向。
它们通常使用加速度计或陀螺仪来检测波浪运动,并且可以将实时数据传输到岸上设施以进行分析。
什么是纵荡、横荡、垂荡?
纵荡、横荡和垂荡是描述船舶或平台在海洋中运动的三个平移运动。它们是运动的六个自由度 (DOF) 的一部分,其中还包括纵摇、横摇和艏摇(旋转运动)。
- 纵荡是船舶沿其纵轴的线性运动(向前和向后)。例如,当船舶因波浪或推进力而加速或减速时,它会经历纵荡。
- 横荡是沿横轴的线性运动(从一侧到另一侧)。当船舶由于水流、风或从侧面接近的波浪而横向漂移时,就会发生这种情况。
- 垂荡是沿垂直轴的线性运动(向上和向下)。它主要是由波浪抬高和降低船只引起的。
纵荡、横荡和垂荡共同定义了船舶在三维空间中的平移位移。这些运动在导航、海上钻井、动态定位和海洋测量中至关重要,因为它们直接影响稳定性、精度和安全性。
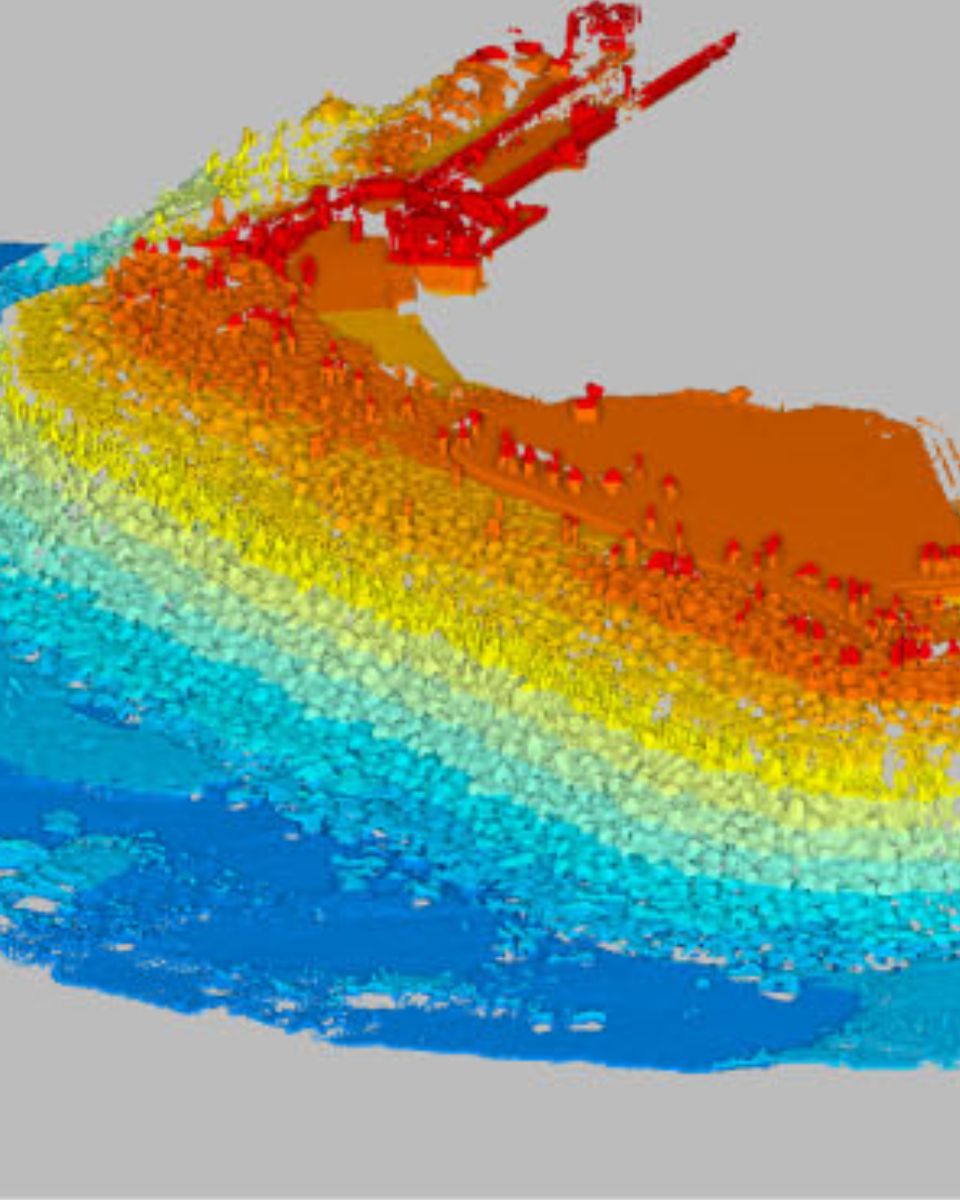
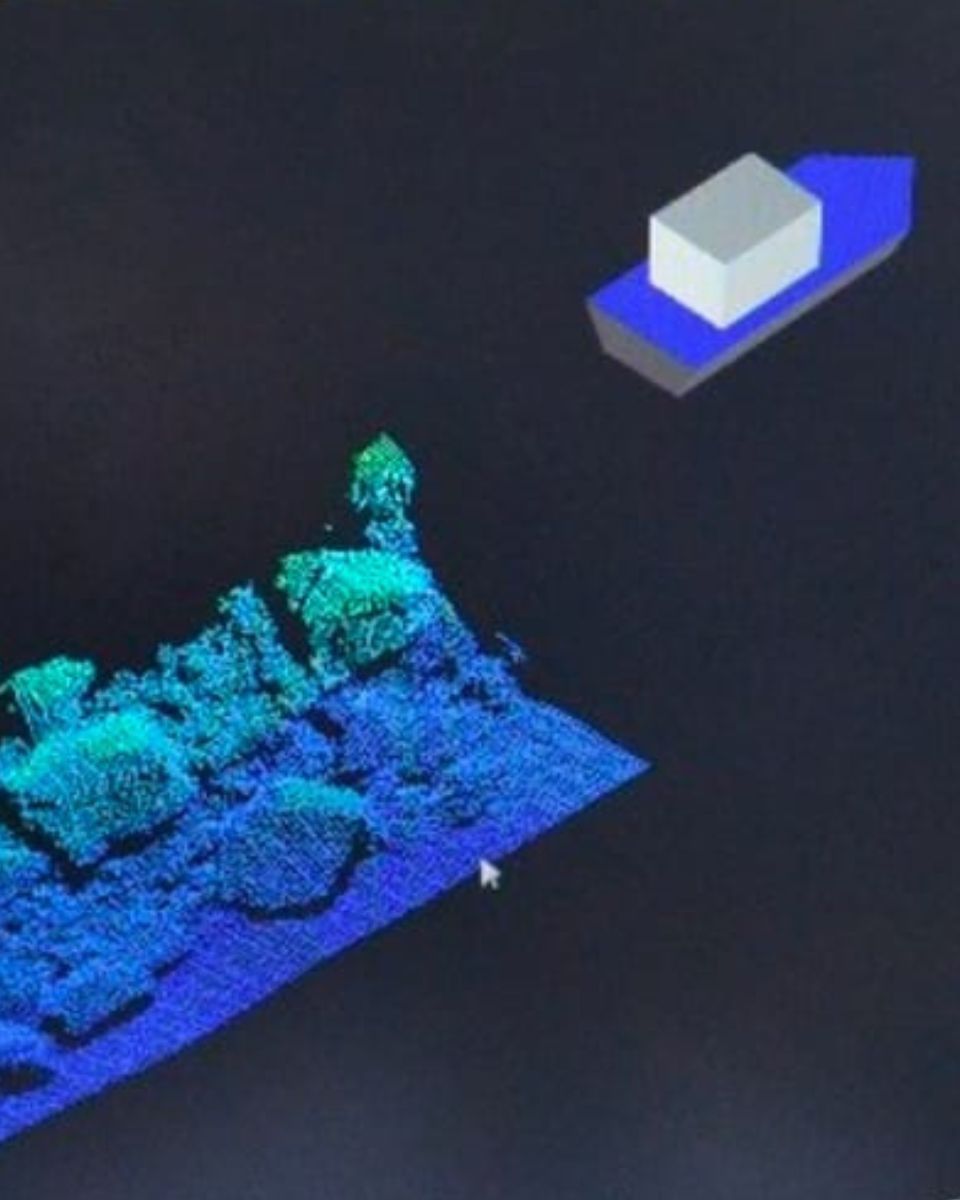
什么是多波束回声测深?
什么是水深测量?
测深是对水下地形的深度和形状进行研究和测量的学科,主要侧重于绘制海底和其他水下地貌。它是水下地形的等效物,提供了对海洋、湖泊和河流的水下特征的详细了解。测深在各种应用中起着至关重要的作用,包括导航、海洋建设、资源勘探和环境研究。
现代测深技术依赖于声纳系统,例如单波束和多波束回声测深仪,它们使用声波来测量水深。这些设备向海底发送声波脉冲,并记录回声返回所需的时间,根据水中声速计算深度。特别是多波束回声测深仪,可以一次绘制大片海底地图,从而提供高度详细和准确的海底表示。通常,RTK + INS 解决方案与此相关联,以创建精确定位的海底 3D 测深表示。
水深数据对于创建航海图至关重要,它通过识别潜在的水下危险(如水下岩石、沉船和沙洲)来帮助安全引导船只。它还在科学研究中发挥着至关重要的作用,帮助研究人员了解水下地质特征、洋流和海洋生态系统。
什么是水文测量?
水文测量是测量和绘制水体(包括海洋、河流、湖泊和沿海地区)物理特征的过程。它涉及收集与海底的深度、形状和轮廓(海底测绘)以及水下物体、导航危险和其他水下特征(例如水槽)的位置相关的数据。水文测量对于各种应用至关重要,包括导航安全、海岸管理和沿海测量、建筑和环境监测。
水文测量 涉及几个关键组成部分,首先是测深,它使用声纳系统(如单波束或多波束回声测深仪)测量水深和海底地形,这些系统向海底发送声脉冲并测量回声的返回时间。
精确定位至关重要,使用全球导航卫星系统 (GNSS) 和惯性导航系统 (INS) 将深度测量与精确的地理坐标联系起来。此外,还测量水柱数据(如温度、盐度和水流),并收集地球物理数据,以使用侧扫声纳和磁力计等工具检测水下物体、障碍物或危险。