
NED(North-East-Down) 좌표계는 내비게이션 및 관성 측정에 널리 사용되는 기준 시스템 역할을 합니다.
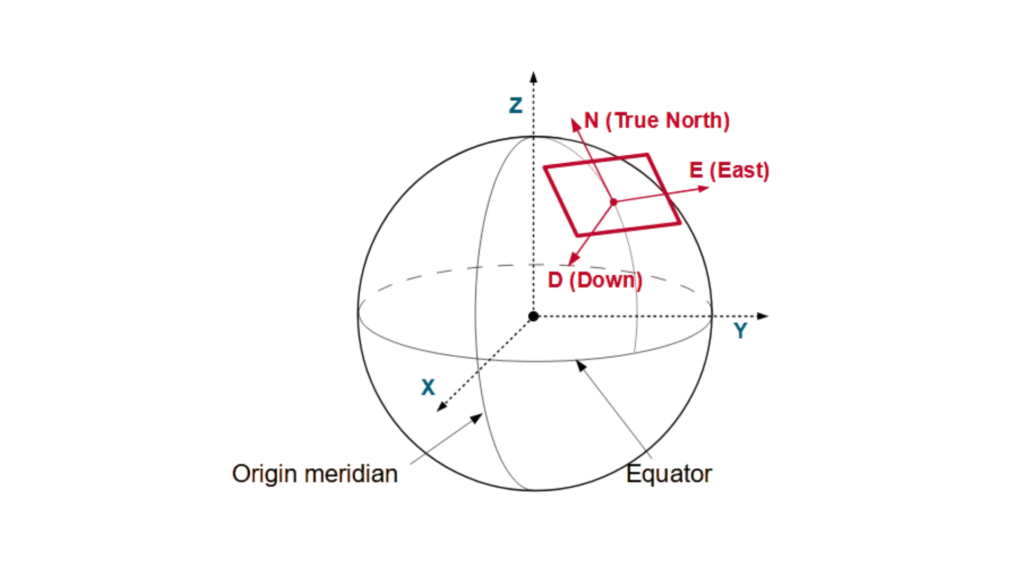
North-East-Down(NED) 프레임은 ECEF 좌표로 정의된 로컬 기준 프레임 역할을 합니다. 일반적으로 차량 또는 플랫폼에 고정되어 차체 프레임과 함께 움직입니다. 이 프레임은 WGS84 타원체 모델을 기반으로 현재 위치에서 지구 표면에 접하는 평면에 북쪽 및 동쪽 축을 배치합니다.
여기에는 세 개의 직교 축이 있습니다. 북쪽 축은 진북을 가리키고, 아래쪽 축은 지구 내부(로컬 위쪽 방향과 반대)를 향해 확장되며, 동쪽 축은 북쪽(수직)에 수직으로 동쪽을 가리켜 오른손 시스템을 완성합니다.
마찬가지로, 차량 또는 플랫폼은 East-North-Up(ENU) 프레임을 로컬로 연결하여 시스템과 함께 이동할 수 있습니다. NED 프레임과 달리 ENU 프레임은 축 방향이 다릅니다. 북쪽 축은 여전히 진북을 가리키지만, 위쪽 축은 지구 내부에서 멀어지고 동쪽 축은 동쪽을 가리키면서 오른손 시스템 정렬을 유지합니다.
이 오른손 좌표계는 자연스러운 움직임 방향에 맞춰 항공기, 해양 선박 및 자율 차량의 계산을 단순화합니다.
NED applications use
드론은 NED 좌표 프레임워크 내에서 궤적을 계산하기 위해 자동 조종 시스템에 의존합니다. 드론이 북쪽으로 비행할 때 북쪽 방향으로 위치가 증가합니다. 반대로 드론이 상승하면 아래쪽이 아래쪽으로 양수이므로 아래쪽 좌표 값이 감소합니다.
반대로 선박의 INS (관성 항법 시스템)은 NED 프레임을 기준으로 움직임을 추적하여 작동합니다. 선박이 동쪽으로 이동함에 따라 동쪽 좌표가 증가합니다. 반대로 선박이 잠수하면 아래쪽 좌표가 상승합니다.
자율 주행 자동차는 NED 프레임을 활용하여 위치를 확인합니다. 차량이 북쪽으로 이동함에 따라 북쪽 좌표가 증가하는 반면 지형의 범프 또는 딥으로 인해 아래쪽 값이 변경됩니다.
정밀 유도 탄약은 NED 프레임을 사용하여 궤적을 조정합니다. 미사일이 목표물을 향해 하강함에 따라 아래쪽 좌표가 증가하여 정확한 타겟팅을 보장합니다.
AUV (자율 수중 차량)는 NED 프레임을 사용하여 탐색합니다. AUV가 북동쪽 방향으로 이동하면 북쪽 및 동쪽 좌표가 모두 증가하는 반면 깊이의 변화는 아래쪽 좌표에 영향을 미칩니다.
NED 시스템은 움직임을 지구의 자연스러운 방향과 일치시키기 위해 개발되어 내비게이션을 단순화합니다. 이 시스템은 엔지니어, 조종사 및 과학자가 포지셔닝, 안내 및 제어 애플리케이션의 정밀도를 향상시키는 데 사용됩니다.