관성 측정 장치(IMU)는 현대적인 내비게이션 및 모션 추적 시스템의 기본 구성 요소입니다.
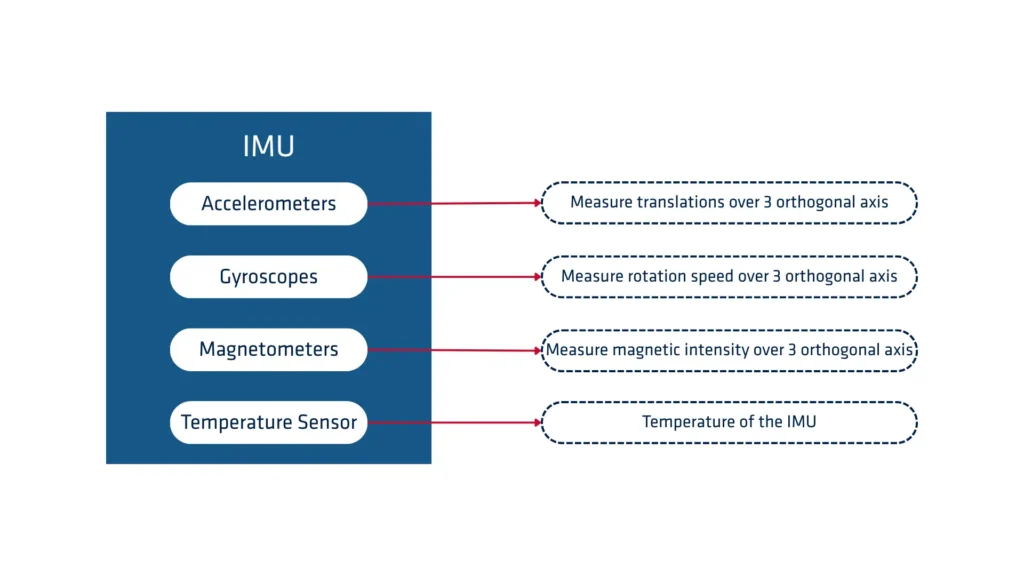
관성 측정 장치(IMU)는 가속도계, 자이로스코프, 그리고 때로는 자력계의 조합을 사용하여 물체의 특정 힘, 각속도, 그리고 때로는 물체 주변의 자기장을 측정하고 보고하는 전자 장치입니다.
IMU는 항공기 및 선박에서 스마트폰 및 게임 컨트롤러에 이르기까지 다양한 물체의 위치와 방향을 추적하고 제어하는 데 매우 중요합니다.
FOG(광섬유 자이로스코프) 기반, RLG IMU(링 레이저 자이로스코프) 기반, 그리고 마지막으로 MEMS 기술(Micro Electro-Mechanical Systems) 기반 IMU와 같이 다양한 유형의 IMU 센서가 있습니다. 이 기술은 성능을 보장하면서 더 낮은 비용과 낮은 전력 요구 사항을 가능하게 합니다. 따라서 MEMS 기반 시스템은 더 작은 장치에서 고성능과 초저전력을 결합합니다.
이 시스템은 까다로운 실시간 애플리케이션을 위해 1KHz로 원시 데이터를 출력합니다.
최고의 IMU 선택하는 방법은 무엇인가요?
필요에 가장 적합한 IMU를 선택할 때는 높은 정확도, 신뢰성 및 성능을 보장하기 위해 여러 요소를 고려해야 합니다. 첫 번째 요소는 측정의 정확성에 직접적인 영향을 미치는 센서 정확도입니다.
고품질 IMU는 낮은 바이어스, 드리프트 및 노이즈를 가지므로 제공하는 데이터가 시간이 지남에 따라 정확하고 안정적인지 확인합니다. 보정 또한 중요하며, 특히 동적 환경에서 오류 누적을 최소화하는 잘 보정된 센서입니다.
IMU 센서의 범위와 해상도 또한 중요합니다. 애플리케이션에 따라 극한 조건을 처리하기 위해 넓은 동적 범위를 가진 IMU가 필요하거나 더 작은 움직임에서 정밀한 측정을 위해 높은 해상도를 가진 IMU가 필요할 수 있습니다.
전력 소비는 특히 드론 및 자율 주행 차량과 같은 배터리 작동 시스템의 경우 또 다른 중요한 고려 사항입니다. 저전력 IMU는 작동 시간을 연장하고 에너지 비용을 줄여 장기 임무에 더 효율적입니다.
내구성은 필수적입니다. 방위 또는 항공 우주에 사용되는 것과 같이 열악한 환경을 위해 설계된 IMU는 온도 변동, 진동 및 충격을 견딜 수 있을 만큼 견고해야 합니다. 또한 폼 팩터 및 통합 호환성을 고려하십시오.
더 작고 가벼운 IMU는 휴대용 장치 또는 무인 시스템에 가장 적합하고, 더 큰 시스템은 더 강력한 애플리케이션에 필요합니다.
마지막으로, 고성능 IMU 제공에 입증된 실적을 가진 신뢰할 수 있는 제조업체를 선택하면 정확하고 정밀한 모션 추적에 대한 요구 사항을 충족하는 신뢰할 수 있는 제품을 얻을 수 있습니다.