
센서 좌표계 또는 본체 프레임은 드론, 차량, 로봇 또는 미사일과 같은 센서 또는 플랫폼과 함께 움직이는 로컬 기준 프레임입니다. 센서의 물리적 구조를 기준으로 방향과 움직임을 정의합니다. 엔지니어는 본체 프레임을 사용하여 센서의 관점에서 직접 가속도, 각속도 및 속도와 같은 측정값을 표현합니다.
센서(본체) 좌표계(본체 기준틀 또는 차량 기준틀이라고도 함)는 드론, 자동차, 미사일 또는 수중 차량과 같은 이동 플랫폼에 고정된 기준틀 역할을 합니다. 엔지니어는 이 기준틀을 사용하여 플랫폼 자체를 기준으로 플랫폼의 움직임과 방향을 설명하며, 이는 내비게이션, 제어 및 센서 융합에 필수적입니다.
대부분의 애플리케이션에서 사용자는 IMU, GNSS 수신기 또는 AHRS 장치와 같은 센서를 차량에 직접 장착합니다. 이러한 센서는 자체 좌표계로 데이터를 보고하며, 이는 일반적으로 본체 기준틀과 일치합니다. 이는 오른손 좌표계를 형성하는 세 개의 직교 축으로 구성됩니다.
- X축은 전방, 즉 운동 방향 또는 센서의 노즈 방향을 가리킵니다.
- Y축은 오른쪽(해양 또는 항공기 시스템의 경우 우현)을 가리킵니다.
- Z축은 애플리케이션에 따라 센서의 베이스를 기준으로 아래쪽 또는 아래쪽을 가리킵니다.
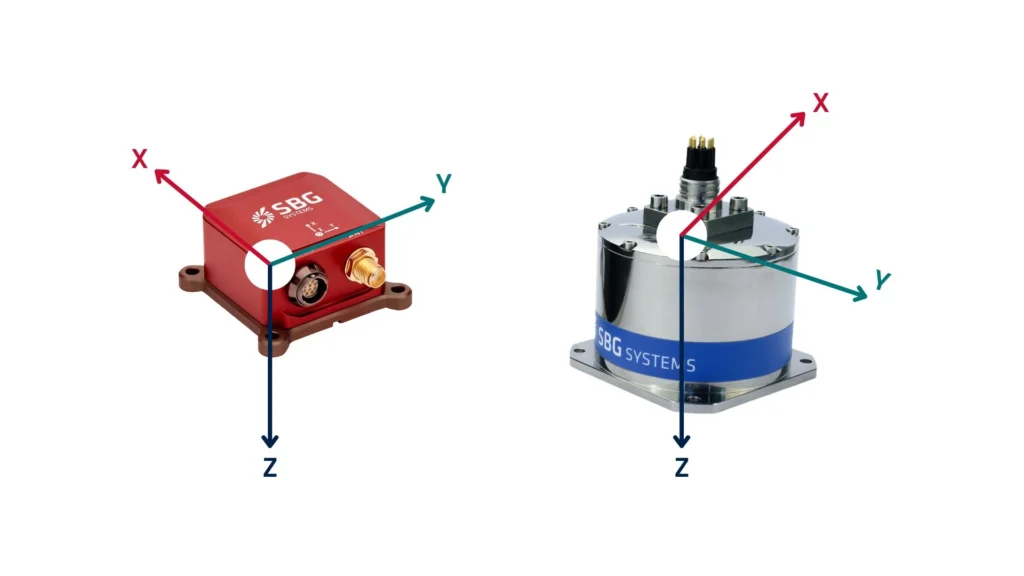
이 고정된 방향을 통해 시스템은 지구를 기준으로 하지 않고 자체 공간에서 어떻게 움직이거나 회전하는지 측정할 수 있습니다.
차체 프레임 애플리케이션의 예
드론의 IMU는 자체 기준틀에서 가속도와 회전을 측정합니다. 드론이 앞으로 기울어지면 Y축을 중심으로 각속도를 감지합니다. 시스템은 이 데이터를 비행 컨트롤러로 전송하여 드론이 안정화되고 비행 명령을 정확하게 실행할 수 있도록 합니다. 예를 들어, 드론의 자동 조종 시스템은 본체 기준틀의 센서 데이터를 활용하여 비행을 안정화하고 요, 피치 및 롤과 같은 기동을 실행합니다. 시스템은 움직임을 직접 해석하여 드론 자체 기준틀을 기준으로 전진, 측면 및 수직 움직임으로 표현합니다.
반면에 자율 주행 자동차는 본체 기준틀에서 X(전진), Y(측면) 및 Z(수직) 축을 따라 선형 가속도를 감지합니다. 이 기능을 통해 차량은 속도를 조정하고, 차선 제어를 유지하며, 지형 변화에 대응할 수 있습니다. 이 좌표계는 라이다, 레이더 및 관성 데이터의 해석을 용이하게 합니다. 자동차의 제어 시스템은 이러한 판독값을 사용하여 자체 방향을 기준으로 실시간 운전 결정을 내립니다.
미사일의 내비게이션 시스템은 방향 추적을 위해 본체 기준틀을 활용합니다. 기동할 때 온보드 센서는 본체 고정 축에서 회전 속도와 가속도를 감지하여 정확한 코스 수정을 가능하게 합니다. 미사일의 온보드 내비게이션 시스템은 본체 기준틀을 사용하여 가속도와 각속도를 추적하여 현재 위치와 좌표계 방향을 기준으로 궤적과 방향을 조정할 수 있습니다.
로봇 팔은 본체 기준틀을 사용하여 조인트 움직임과 엔드 이펙터 위치를 계산합니다. 각 모터의 위치와 방향은 실시간 제어를 보장하기 위해 이 로컬 기준틀에서 측정됩니다.
센서 정렬 문제
실제 적용에서 센서는 항상 본체 프레임과 완벽하게 정렬되지는 않습니다. 이를 해결하기 위해 엔지니어는 센서의 좌표계를 차량의 본체 프레임과 정렬하는 프레임 회전 보정을 자주 구현합니다. 이를 통해 위치, 속도 및 방향과 관련된 계산에 대한 정확한 판독값을 보장합니다. 이는 움직이고 환경을 감지하는 모든 시스템에 기본적입니다. 실시간 항법, 제어 및 안정화에 중요한 역할을 하므로 항공 우주, 방위, 자동차 및 로봇 시스템에 필수적입니다.
프로젝트에 대해 알려주세요