Ekinox Micro와 Quanta Micro는 도시 내비게이션의 최전선에 있으며, 당사는 이 제품들을 자동차 테스트에 적용했습니다.
이 두 제품은 전술 MEMS 기반 IMU와 모든 기능을 갖춘 RTK GNSS 수신기를 결합하여 놀라울 정도로 컴팩트한 폼 팩터 내에서 탁월한 성능을 제공하는 두 개의 관성 내비게이션 시스템입니다.
무인 지상/항공/해상 차량, 실내 매핑, 심지어 UAV 측량과 같이 엄격한 SWaP 제약 조건이 있는 애플리케이션을 위해 특별히 제작되었습니다.
이 포괄적인 성능 평가 기사는 Quanta Micro의 상용 도입을 예상하여 2022년 7월에 실행된 철저한 테스트를 기반으로 합니다. 이 보고서를 통해 시스템의 동적 성능이 입증되었습니다.
센서는 탁 트인 하늘, 중간 도시 지역 및 도시 협곡을 포함한 다양한 GNSS 환경에서 광범위하게 테스트되었습니다. 결과는 일관되게 뛰어난 데이터 품질을 보여주었습니다. Quanta Micro와 Ekinox Micro는 까다로운 시나리오에서도 지정된 성능을 초과했습니다.
사양은 일반적으로 워밍업 단계 후 일반적인 육상 조건과 같은 산업 표준 시나리오를 기반으로 하지만, 테스트에는 워밍업 단계 없이 어려운 도시 조건이 포함되었습니다.
놀랍게도 Ekinox Micro와 Quanta Micro는 이 테스트에서 탁월한 성능을 보여 모든 조건에서 뛰어난 성능을 입증했습니다.
필수 조건
이 테스트 보고서를 읽으려면 관성 항법 및 후처리 개념에 대한 지식이 어느 정도 필요합니다. SBG Systems의 지식 기반은 관성 항법의 세계로의 여정을 시작하는 데 도움이 될 것입니다.
약어
- CORS: 상시 운영되는 기준국
- DUT: 테스트 대상 장치
- EUT: 테스트 장비
- FOG: 광섬유 자이로스코프
- GNSS: Global Navigation Satellite Systems (GPS + GLONASS + BEIDOU + GALLILEO)
- IGN: Institut Géographique National (프랑스 공식 지리 기관)
- IMU: Inertial Measurement Unit
- INS: Inertial Navigation System
- LiDAR: Light Detection And Ranging
- MEMS: Micro Electro-Mechanical System
- Merged: Qinertia를 사용한 순방향 + 역방향 후처리
- PPK: 후처리 방식
- RGP: Réseau GNSS Permanent (프랑스 국가 CORS 네트워크)
- RMS: 제곱 평균 제곱근
- RTK: Real-Time Kinematic
- Std: 표준 편차
- SWaP-C: 크기, 무게 및 전력 - 비용
- TC: Tight Coupling
- UAV: Unmanned Aerial Vehicle
테스트 임무 목표 및 사양
미션 계획 및 실행
테스트는 2022년 7월 7일 SBG Systems 테스트 차량에 탑재되어 수행되었습니다. SBG Systems 시설 주변에서 맑은 날씨 조건에서 115분 동안 주행했습니다. 포함된 시설:
- 개방된 환경에서 45분 동안 연속 작동.
- 반밀집된 도심 환경에서 35분간 연속 작동.
- 터널을 포함한 열악한 도심 환경에서 35분간 연속 작동.

위성 가시성과 관련하여 유리한 시간대를 선택하기 위한 임무 계획에 특별한 주의를 기울이지 않았는데, 이는 환경의 복잡성을 고려한 것입니다.
미션 목표
이 미션은 Quanta Micro 및 Ekinox Micro INS가 실제 시나리오에서 어떻게 작동하는지 보여주기 위해 특별히 설계되었습니다. 이를 통해 INS가 사양을 충족(및 초과)하는지 확인할 수 있을 뿐만 아니라 가장 어려운 GNSS 조건에서도 뛰어난 성능을 입증할 수 있었습니다.
미션 동안 Quanta Micro의 실시간 성능을 측정하는 데이터를 수집했습니다. 그런 다음 동일한 데이터 세트(PPK)의 후처리를 수행했습니다.
이를 통해 자동차 환경에서 Quanta Micro INS의 성능에 대한 전체적인 시각을 제공할 수 있습니다. 그리고 특정 테스트 보고서의 주제인 다른 애플리케이션에도 어느 정도 적용됩니다.
최적화된 모션 프로파일을 사용하면 자동차 및 비행기 모션 프로파일에서 처리를 비교하여 이점을 확인할 수 있습니다.
자동차 테스트 설정
시험 대상 장비
| 이름 | 설명 | HW Revision | 시리얼 번호 | 펌웨어 버전 |
|---|---|---|---|---|
| EUT #1 | Quanta Micro | 1.1 | 000041817 | 4.1.5929-Dev |
| EUT #2 | Quanta Micro | 1.1 | 000041818 | 4.1.5929-Dev |
| 프록시로 평가됨 | Ekinox Micro | 0.1 | 000046860 | 5.0.1945-beta |
모든 테스트에서 설치 파라미터(정렬 불량, 레버 암 등)는 CAD 도면 또는 이전 교정을 통해 사전에 알려졌습니다.
두 EUT 모두 Quanta Micro이지만 이 테스트 보고서의 내용은 Ekinox Micro에 완전히 적용할 수 있습니다. Ekinox Micro는 Quanta Micro의 견고한 버전이며 정확히 동일한 방식으로 작동합니다. 일련의 세심한 내부 비교를 통해 이러한 주장이 확인되었습니다.
기준 궤적
성능 오류를 평가하는 데 사용된 참조 소스는 SBG Systems Horizon IMU(FOG 기반 최고 성능), Navsight-S 및 EUT와 함께 차량에 설치된 Pegasem 주행 거리계에서 제공되는 데이터를 사용하여 Qinertia로 처리된 밀결합 궤적입니다. 후처리에 사용된 Qinertia 버전은 3.2.881-stable입니다.
| 이름 | 설명 | 위치 정확도 | 자세 정확도 | 헤딩 정확도 |
|---|---|---|---|---|
| Navsight Horizon | FOG 기반 INS | 0.01m (0.01m @ 10초) (0.05m @ 60초) | 0.004° (10초에서 0.004°) (60초에서 0.005°) | 0.008° (10초에서 0.008°) (60초에서 0.010°) |
Navsight-S에 연결되는 두 개의 VSP6037L GNSS 안테나는 EUT와 공유됩니다(테스트 설정 다이어그램 참조).
사후 데이터 분석에서 사후 처리된 Horizon 궤적의 품질 지표(위치 및 자세 표준 편차 추정기)를 통해 후자를 EUT에 대한 참조로 완전히 사용할 수 있습니다.
온보드에 설치된 세 개의 INS 위치는 직접 비교를 위해 공통 지점으로 옮겨졌습니다.
기준국
모든 PPK 및 RTK 작업은 SBG Systems 시설 옥상에 설치되어 프랑스 CORS 네트워크인 IGN RGP에 포함된 SBG 스테이션을 단일 기준으로 사용하여 수행되었습니다.
SBGS는 모든 GNSS 위성 시스템(GPS + GLONASS + GALILEO + BEIDOU) 추적을 제공합니다. 4개의 위성 시스템 모두 실시간 RTK 작업에 사용되었습니다.
테스트 차량
테스트 차량은 SBG Systems 전용 밴으로, 다음 설정 다이어그램에 제시된 표준 장비가 장착되어 있습니다.

두 GNSS 안테나 사이의 기준선은 약 2m이며 대부분의 설치 매개변수는 특히 정밀도가 높습니다.
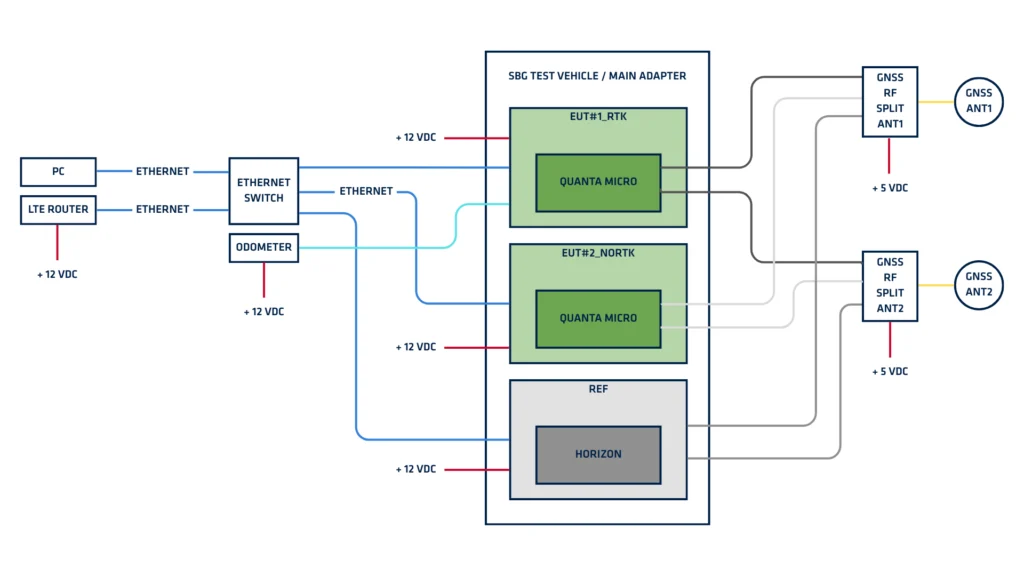
EUT 구성
테스트 대상 장비(EUT)는 실시간 측정을 위해 다음과 같이 구성되었습니다.
- EUT1: 4개 위성 시스템 모두를 사용하는 GNSS, RTK 및 주행 거리계 지원.
- EUT2: 4개 위성 시스템 모두를 사용하는 GNSS, RTK 미사용, 주행 거리계 지원 미사용.
자동차 테스트 결과
자동차 테스트에는 예열 단계가 포함되며, 모든 통계는 의도적으로 포함하여 계산되었습니다.
이러한 선택은 대부분의 경우 대부분의 수치, 특히 미션 시작 후 처음 5~10분 동안 매우 빠르게 감소하고 높은 값이 표준 편차 및 RMS에 상당한 영향을 미치는 헤딩 오류에 부정적인 영향을 미칩니다.
또한 개방된 하늘, 중간 및 열악한 GNSS 환경의 세 가지 미션 부분을 모두 의도적으로 포함하여 자동차 프로필을 가장 잘 나타내는 RTK 미사용, RTK 및 PPK 이중 안테나 통계를 계산했습니다. 이러한 선택 또한 대부분의 수치에 부정적인 영향을 미칩니다.
이러한 두 가지 선택으로 인해 값이 비관적으로 보입니다. 그러나 Quanta Micro는 정렬 단계 직후에도(예열이 불가능하더라도) 특히 우수한 성능으로 사용할 수 있으며 지정된 것보다 훨씬 더 어려운 테스트 환경에서도 제품 성능 사양을 거의 충족할 수 있는 Quanta Micro 알고리즘의 견고성을 입증합니다.
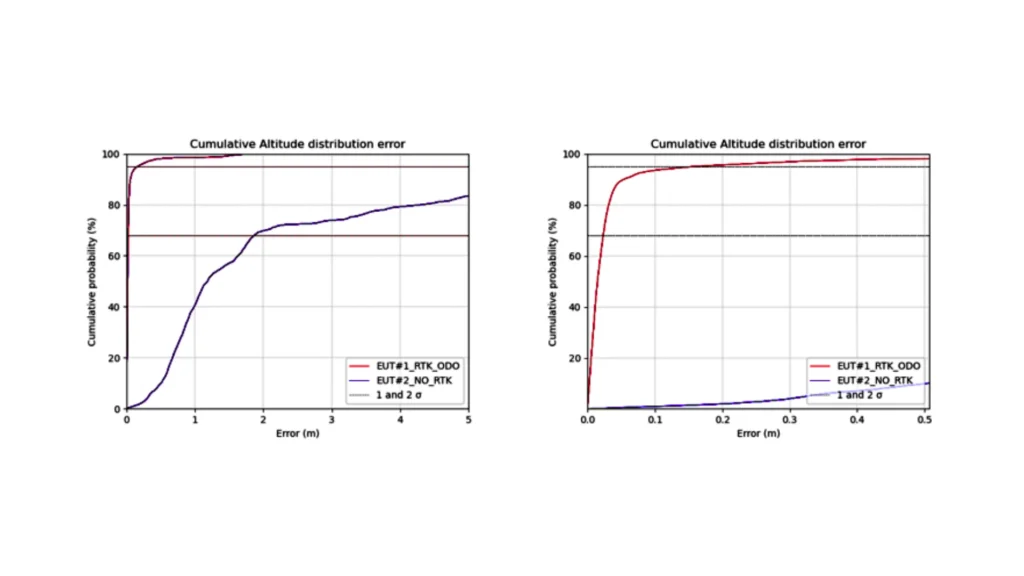
실시간 시나리오
이러한 INS는 실시간으로 작동하여 RTK 보정 유무에 관계없이 고주파수 저지연 내비게이션 솔루션을 제공할 수 있습니다. 아래 표와 그림은 다음 조건에서 두 EUT에 대한 자세한 실시간 결과를 제공합니다.
- 자동차 모션 프로필
- EUT #1에 대한 주행 거리계 보정 (RTK), EUT #2에 대한 주행 거리계 보정 없음 (RTK 없음)
- 듀얼 안테나 GNSS 헤딩 입력 사용
| EUT#1 (RTK + odo) | EUT#2 (RTK 없음, odo 없음) | |||
|---|---|---|---|---|
| 오류 | 68% | 95% | 68% | 95% |
| 2D 위치 | 0.021m | 0.246m | 1.155m | 2.734m |
| 수직 위치 | 0.023m | 0.157m | 1.865m | 7.329m |
| Roll / Pitch | 0.011° | 0.026° | 0.015° | 0.035° |
| Yaw | 0.060° | 0.140° | 0.078° | 0.190° |
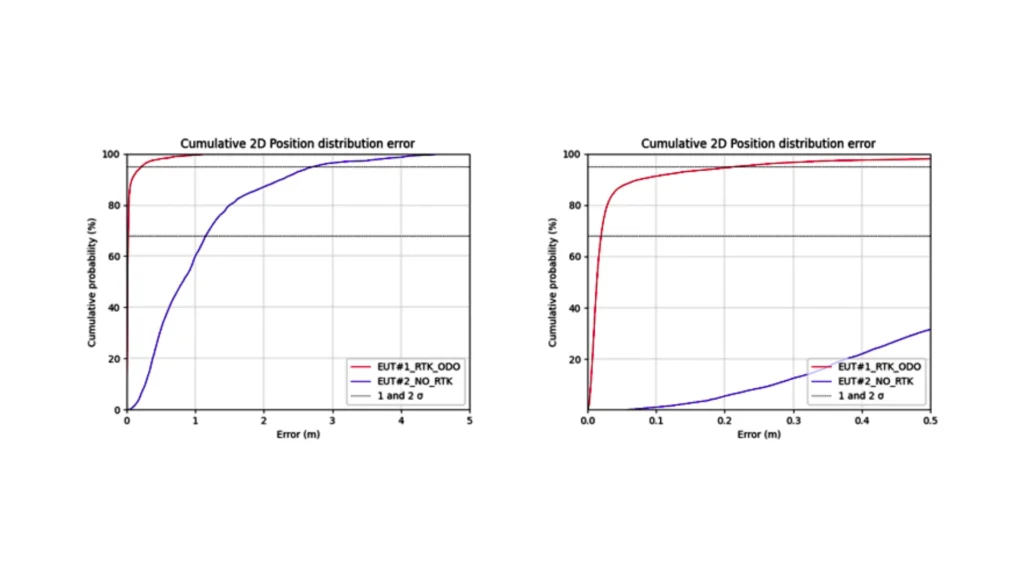
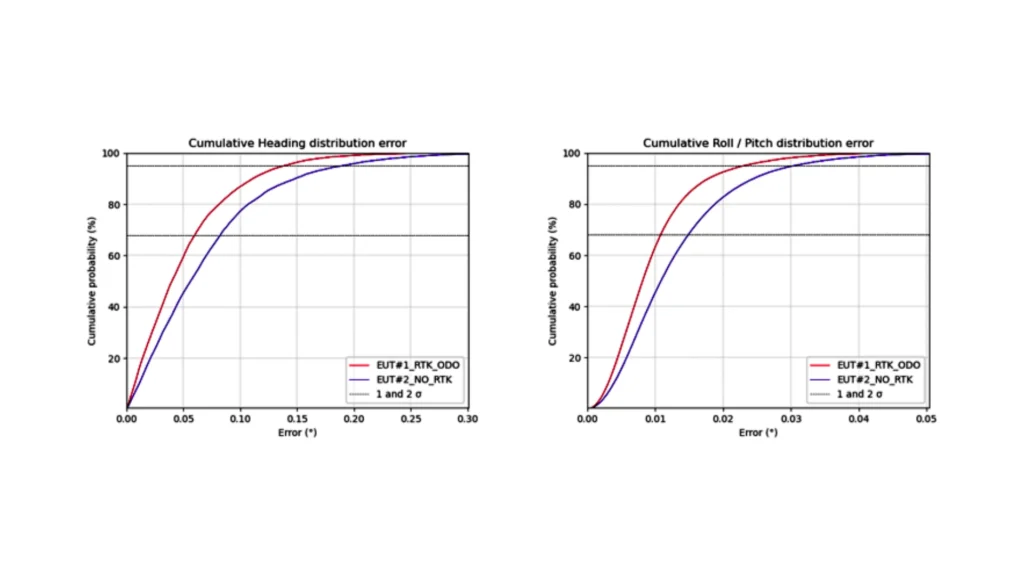
Despite the challenging conditions, the real time attitude and heading performance enables precise navigation, with better than 0.08° heading accuracy without RTK and better than 0.06° with RTK. Roll and pitch angles are also highly accurate (< 0.015° with or without RTK).
On the position side, the INS is able to cope with short GNSS outages, impacting very positively the 68th and 95th percentiles, compared to traditional GNSS technology.
The typical position performance specification cannot be met in such challenging environments. However, when analyzing open-sky and mid-urban GNSS environments, the system easily meets these specifications.
후처리 시나리오
이러한 시나리오는 TC 병합(순방향 + 역방향) 계산 모드에서 Qinertia 후처리 소프트웨어로 달성할 수 있는 제품의 궁극적인 성능을 평가하고 모션 프로필의 영향을 비교합니다. 단일 EUT(EUT #2)에 대해 표시된 결과는 두 장치 모두 거의 동일했습니다.
| TC 자동차 프로필 (듀얼 안테나 + ODO) | TC 항공기 프로필 (단일 안테나 | |||
|---|---|---|---|---|
| 오류 | 68% | 95% | 68% | 95% |
| 2D 위치 | 0.014m | 0.093m | 0.014m | 0.100m |
| 수직 위치 | 0.008m | 0.032m | 0.008m | 0.034m |
| Roll / Pitch | 0.011° | 0.032° | 0.011° | 0.032° |
| Yaw | 0.051° | 0.211° | 0.041° | 0.208° |
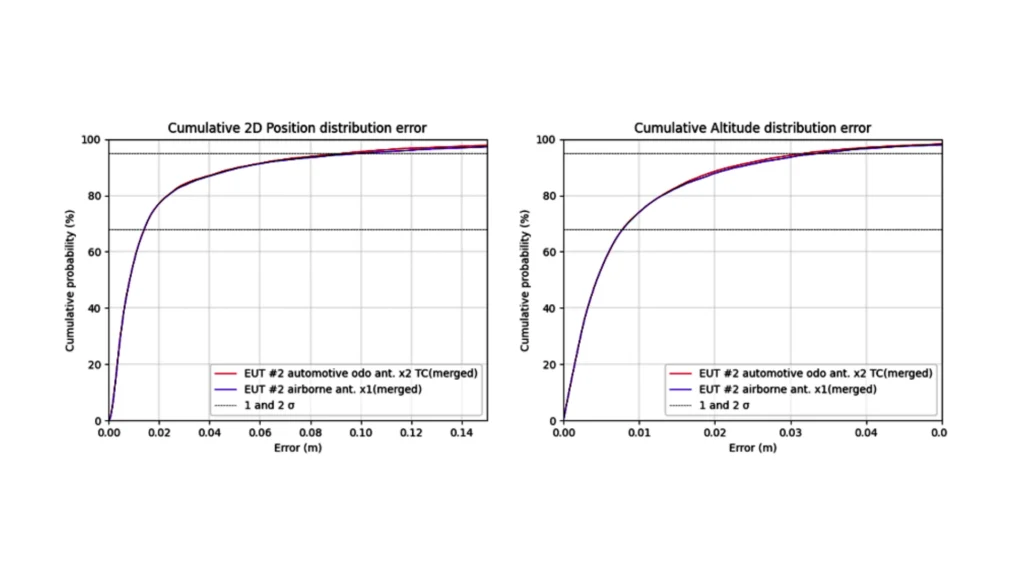
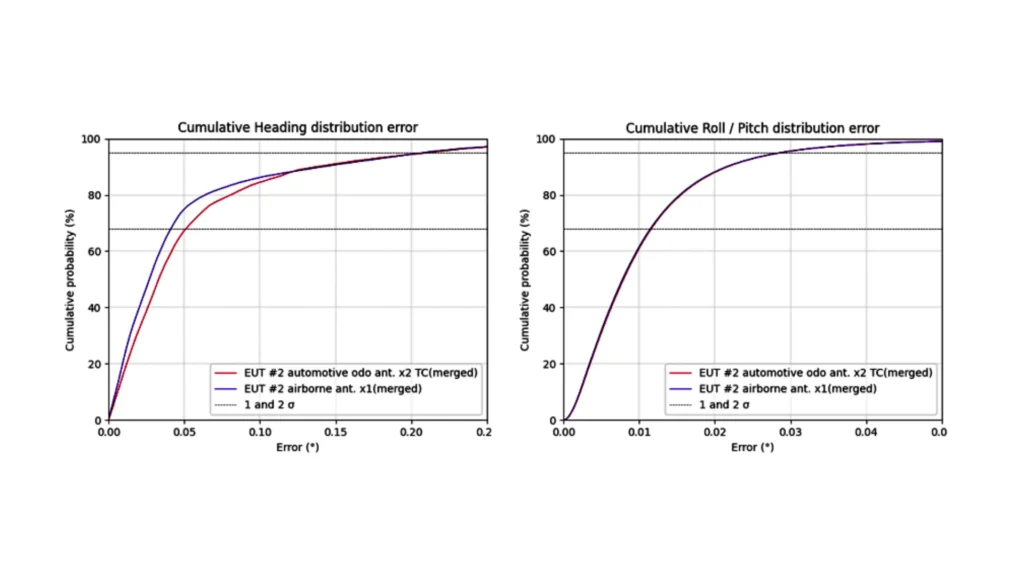
이전 표와 그림은 모션 프로파일이 후처리 성능에 미미한 영향을 미친다는 것을 보여줍니다.
GNSS 환경이 매우 열악했지만 제품은 매우 잘 작동하고 매우 정확한 결과를 생성합니다. 실시간의 경우, 미션을 탁 트인 하늘과 중간 도시 환경으로 제한하면 제품 사양보다 더 나은 결과를 얻을 수 있습니다.
결론
Ekinox Micro 및 Quanta Micro의 테스트 및 후속 데이터 분석은 강력한 기능, 안정성 및 정확성을 강조합니다. 이러한 시스템은 까다로운 환경에서도 단일 및 이중 안테나 모드(RTK GNSS 수신기) 모두에서 매우 뛰어난 성능을 발휘합니다.
Ekinox Micro 및 Quanta Micro는 안정적이고 정확한 포지셔닝 및 자세 결정을 요구하는 실시간 애플리케이션에 탁월한 선택입니다. 견고성이 중요한 내비게이션 애플리케이션에서 최고 성능을 발휘하지만 까다로운 도시 환경에서도 효과적으로 작동합니다.
또한 실시간 성능이 중요하지 않은 시나리오(예: LiDAR 측량 및 사진 측량)에서 SBG Systems의 Qinertia 소프트웨어는 탁월한 후처리를 제공하여 까다로운 GNSS 환경에서도 성능을 센티미터 수준의 정확도로 향상시킵니다. 따라서 INS와 Qinertia의 조합은 직접 지리 참조 및 SLAM 기술에 완벽한 선택입니다.
이 연구는 Quanta Micro 및 Ekinox Micro가 크기, 무게 및 성능에 대한 엄격한 고려 사항이 있는 애플리케이션을 포함하여 다양한 애플리케이션에 적합함을 결정적으로 입증합니다.
- OEM 솔루션으로 설계된 Quanta Micro는 UAV 측량 및 체적 내비게이션 애플리케이션에 완벽하게 통합됩니다.
- 사용자 친화적인 디자인과 견고성(MIL-STD-461 및 MIL-STD-1275에 따라 인증됨)을 갖춘 Ekinox Micro는 경량 측량 애플리케이션에 적합하지만 견고성이 중요한 내비게이션 애플리케이션에서 최고의 성능을 발휘합니다.
보다 유연한 SWaP-C 매개변수와 광범위한 조건에서 더 높은 정밀도를 요구하는 측량 작업의 경우 SBG Systems는 Quanta Plus, Quanta Extra, Ekinox, Apogee 및 Navsight 제품을 제공합니다. Qinertia의 후처리 기능과도 완벽하게 호환되는 이러한 대안은 향상된 성능 수준을 제공하고 최고의 성능을 요구하는 애플리케이션에 탁월한 옵션으로 사용됩니다.
PDF 보고서 다운로드