
일상적인 시나리오에서 독립형 GNSS(GNSS)의 정확도는 길을 찾는 데 충분하지만 많은 애플리케이션에서는 더 높은 정확도가 필요합니다. GNSS의 정확도를 1cm 이내로 향상시키기 위해 많은 차동 보정 기술이 개발되었으며, 이를 통해 광범위한 새로운 애플리케이션이 가능해졌습니다.
이러한 정확도를 달성하려면 계산 및 포지셔닝 결과에 사용되는 기준 좌표계에 주의를 기울여야 하며, 이는 측지학 및 데이텀 변환에서 다루는 주제로, 본 문서의 범위를 벗어납니다.
GNSS 보정
GNSS 정확도 향상은 다양한 오류를 수정하는 데 달려 있습니다.
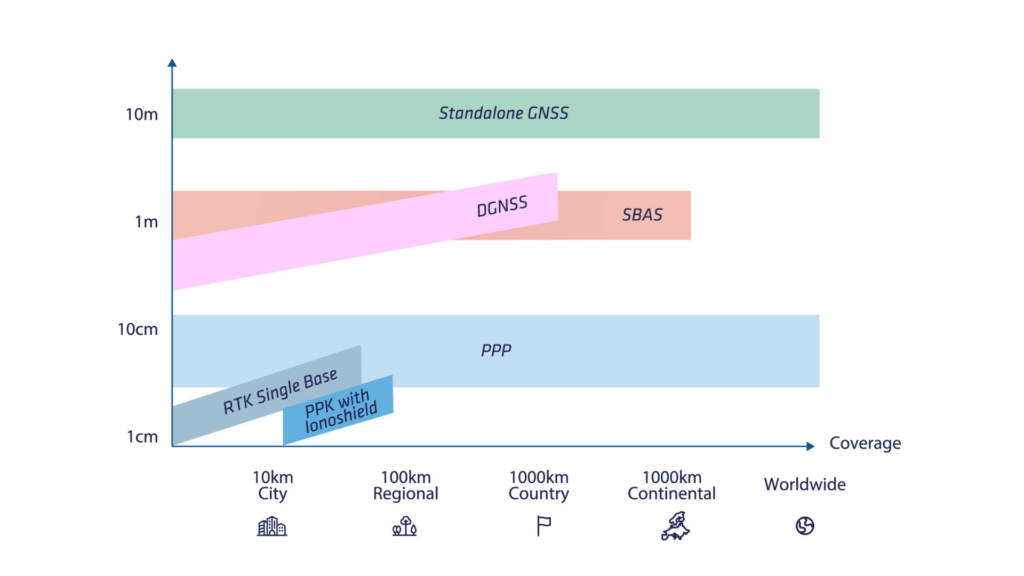
다양한 수준의 커버리지와 성능을 제공하는 여러 유형의 보정이 있습니다.
주요 보정은 아래 표에 자세히 설명되어 있습니다. 이 기사에서는 가장 일반적인 보정의 기본 사항, 즉 DGNSS에 대한 간략한 설명과 SBAS 및 RTK에 대한 자세한 설명, 그리고 PPK의 이점에 대해 설명합니다.
이 시리즈의 다음 기사에서는 Ionoshield와 PPP에 대해 자세히 살펴보겠습니다.
차동 GNSS(DGNSS)
기존의 코드 기반 DGNSS는 위성 오차와 지역 대기 오차가 작은 영역에서 동일하다고 가정합니다. 따라서 한 쌍의 GPS 수신기를 사용하여 대기(전리층 및 대류권) 및 위성 오차를 상쇄하여 내비게이션 성능을 향상시킬 수 있습니다.
이 작동 모드에서는 기준국 GNSS 수신기가 로버 GNSS 수신기의 작동 범위에서 몇 킬로미터 이내에 설치됩니다. 기준국은 RF 또는 GSM 모뎀을 사용하여 로버 수신기로 보정 세트를 전송합니다. 그러면 로버 수신기는 이러한 보정을 사용하여 (기준국을 기준으로) 차등 위치를 계산할 수 있습니다.
이 기술은 내비게이션 정확도를 서브미터 수준으로 향상시킬 수 있지만, RTK가 고정밀 포지셔닝의 표준이 되면서 현재는 더 이상 사용되지 않습니다.
SBAS(Satellite Based Augmentation System)
SBAS는 민간 항공기의 안전한 내비게이션을 위해 개발되었습니다. 이후 독립 실행형 GNSS 수신기보다 더 높은 정확도를 요구하는 다른 많은 최종 사용자 애플리케이션에 사용되었습니다.
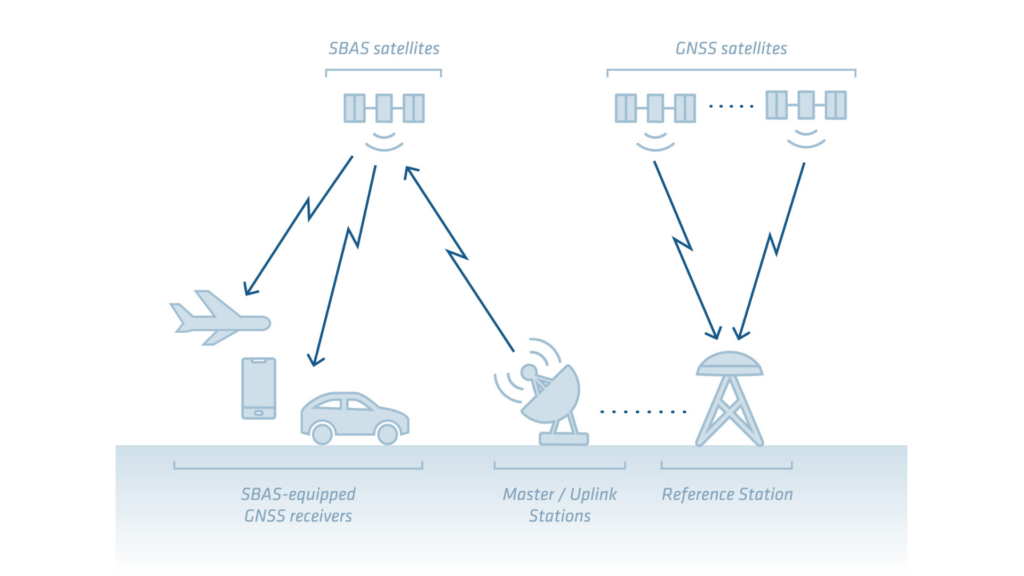
SBAS의 개념은 광범위한 영역(대륙 범위)에서 GPS 성능을 향상시킬 수 있는 보정을 계산하기 위해 기준국 네트워크를 사용하는 것입니다.
이러한 보정은 전용 SBAS 정지 궤도 위성에 의해 브로드캐스트됩니다. 최신 GNSS 수신기는 일반 GNSS 안테나를 통해 이러한 보정을 직접 추적하고 1미터의 정확도를 제공하는 SBAS와 같이 포지셔닝 엔진에서 사용할 수 있습니다.
모든 SBAS 위성 시스템의 주요 목표는 최대 정확도를 달성하는 것이 아니라 무결성(위치 오차의 정확한 측정)이라는 개념을 추가하여 GNSS가 의도한 애플리케이션(항공기 내비게이션 및 착륙)에 대한 최소 정확도를 달성할 수 있도록 하는 것입니다.
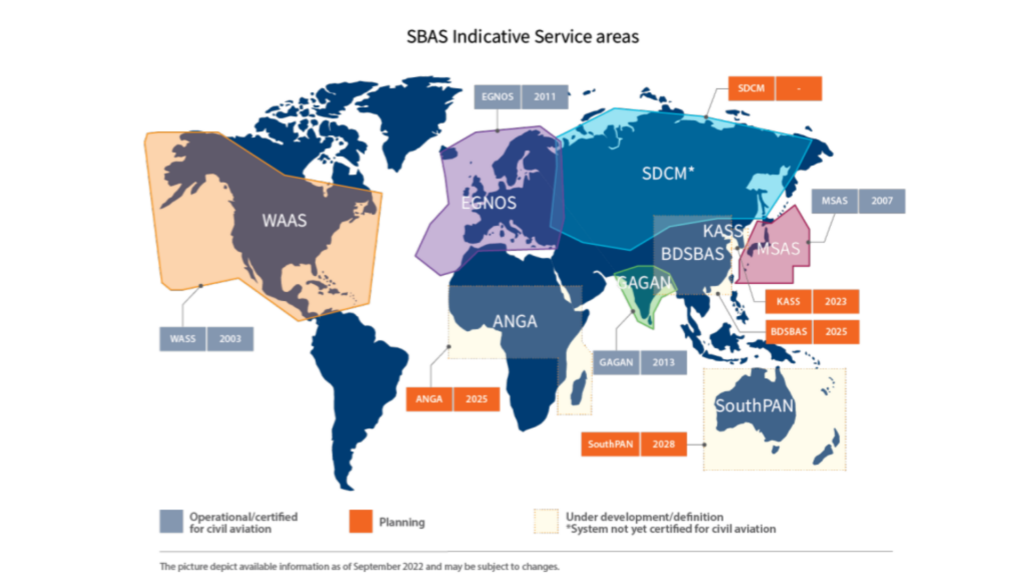
현재 사용 중인 SBAS:
- 북미 국가의 WAAS
- 유럽을 위한 EGNOS
- 인도를 위한 GAGAN
- 일본을 위한 MSAS
그러나 대부분의 현재 SBAS는 GPS 위성 군에 대한 보정만 제공하므로 육상 항법에는 최적이 아닙니다. 미래의 SBAS 솔루션(예: EGNOS V2)은 다중 위성 군 보정을 제공할 것입니다.
SBAS 기술
다양한 SBAS 솔루션은 동일한 기반 기술을 사용하여 보정 정보를 제공합니다. SBAS는 다음을 보정합니다:
- 위성 시계 오차
- 위성 궤도 편차
- 대기 오류
SBAS는 또한 오작동하는 위성의 데이터를 거부하는 데 사용할 수 있는 위성 무결성 정보를 제공합니다.
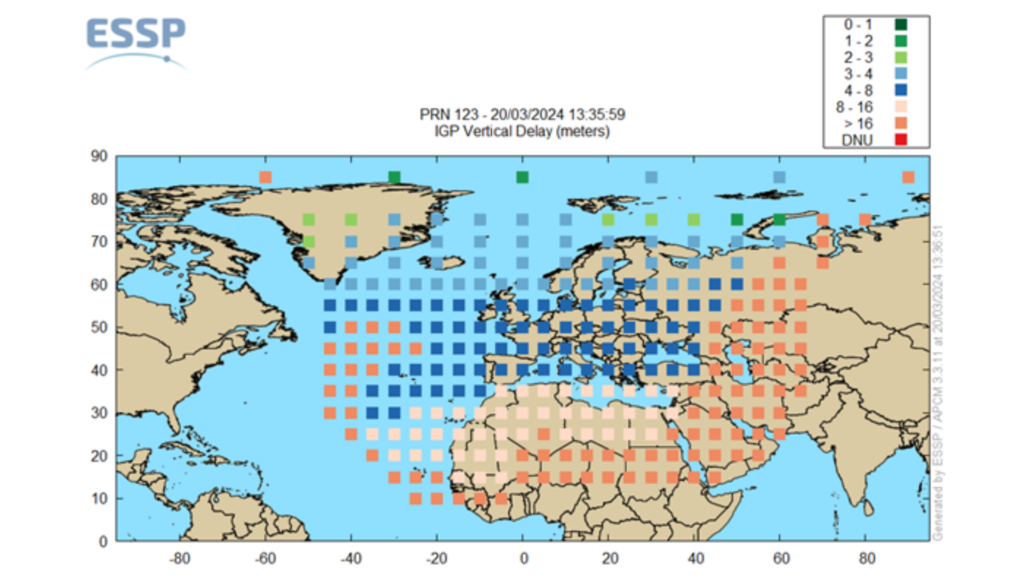
대기 보정은 기지국 네트워크를 사용하여 계산되어 대기 오류 패턴을 제공합니다. 전송된 오류 값은 IGP(Ionospheric Grid Points)라는 지정된 지점에서 대기에 의해 도입된 수직 지연에 해당합니다. 그러면 수신기는 각 위성의 여러 신호에 대한 지연을 보정할 수 있습니다.
SBAS에서 제공하는 정보를 사용하여 수신기는 유사 거리 기반 측정의 오차를 보정하여 위치 정확도를 대략 수평 1.2m RMS 및 수직 1.6m RMS로 향상시킬 수 있습니다. 이는 특히 수직 구성 요소에서 독립 실행형 GNSS에 비해 크게 향상된 것입니다.
실시간 동역학(RTK) 및 후처리 동역학(PPK)
RTK 기술은 1990년대 중반에 측량 애플리케이션용으로 처음 도입되었습니다. 기존의 DGPS(Differential Global Positioning System)와 마찬가지로 RTK는 정확하게 배치된 기준국과 로버 GNSS 수신기에 의존합니다.
센티미터 수준의 정밀한 포지셔닝을 가능하게 하는 두 가지 주요 계산 단계:
- 이중 차분
- 반송파 위상 측정 및 Ambiguity Fixing
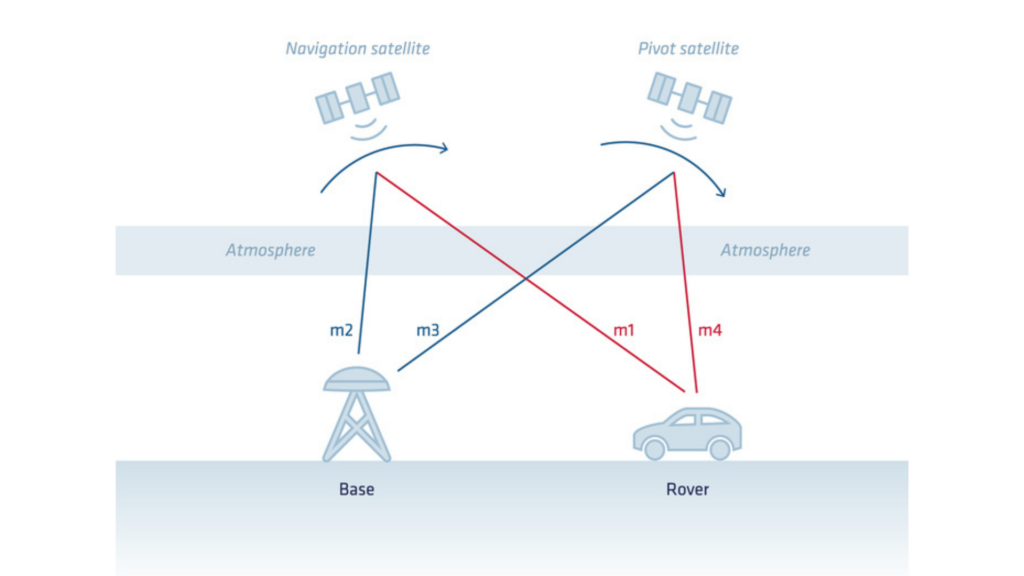
이중 차분
DGPS는 일반적으로 단일 차분 및 코드 측정만 사용합니다.
반면에 RTK는 위상 측정을 추가하고 “이중 차분” 방식을 사용합니다. 이 방법에서는 기준 측정값을 로버 측정값에서 빼고 모든 내비게이션 위성 측정값을 피벗 위성에서 뺍니다.
이 접근 방식은 기지국 근처에서 일정하다고 가정되는 모든 위성 유도 오류, 수신기 유도 오류는 물론 대기 오류까지 보정할 수 있습니다.
이 계산에서 다음을 얻습니다.
- 기지국의 데이텀에서 로버의 위치(위도/경도/고도)
- 로버 시간
기지국과 로버 사이의 거리를 베이스라인이라고 하며, 이는 RTK에서 중요한 요소입니다. 베이스라인이 증가함에 따라 공통 대기 오차 및 공통 위성 궤도 오차가 완전히 상쇄되지 않기 때문에 오차 범위가 약간 증가합니다. 이는 RTK 위치 정확도 사양에서 흔히 볼 수 있는 “+1ppm”입니다.
반송파 위상 측정 및 Ambiguity Fixing
이전 기사에서 소개된 반송파 위상 측정은 오차를 센티미터 수준으로 줄이는 데 필요합니다.
반송파 위상 측정의 과제는 본질적으로 모호하거나 불완전하다는 것입니다. 측정에서 정수 개수의 반송파 위상 사이클이 누락되어 있습니다. 이 누락된 부분을 “모호성”이라고도 합니다.
RTK(Real-Time Kinematic) 포지셔닝 프로세스는 이러한 모호성을 추정하는 것으로 시작됩니다. 이 프로세스를 “RTK Float” 모드라고도 합니다. 이 모드에서는 모호성이 서서히 수렴되지만 정수 값은 아닙니다. 이를 통해 수신기는 위치를 평활화하고 약 데시미터 수준의 정확도를 얻을 수 있습니다.
최대 정확도와 견고성을 달성하려면 다음 단계는 각 모호성에 대한 정수 값을 실시간으로 식별하는 것입니다. 이 프로세스를 정수 모호성 해결이라고 합니다.
모호성 해결의 결과는 RTK 정확도를 극대화하고 더 큰 견고성을 제공합니다. 이를 일반적으로 “RTK Fixed” 모드라고 합니다.
특정 위성에 대한 위상 추적이 중단되면 ‘사이클 슬립’ 이벤트가 발생하고 해당 위성에 대한 정수 모호성을 다시 해결해야 합니다. 이러한 이유로 너무 많은 사이클 슬립(특히 모든 위성에서 동시에 발생하는 사이클 슬립)은 RTK 성능에 부정적인 영향을 미칩니다. 이러한 이벤트를 제한하려면 양호한 안테나 및 안테나 배치와 깨끗한 RF 환경이 필수적입니다.
후처리 운동학
앞서 살펴본 바와 같이 RTK는 이러한 보정을 “실시간”으로 적용하는 것으로, 로버가 현장에서 RTK 처리를 계산하려면 기준국에 대한 데이터 링크 연결이 있어야 함을 의미합니다.
일부 애플리케이션에서는 실시간으로 궤적이 필요하지 않지만 더 높은 정확도 또는 더 간단한 설정의 이점을 얻을 수 있습니다. PPK(Post Processing Kinematic)는 이러한 요구 사항을 충족할 수 있습니다. PPK를 사용하면 로버는 실시간 보정을 수신하지 않고 데이터 수집 중에 자체 원시 GNSS 데이터를 수집합니다. 나중에 이 데이터는 기준국 또는 기준국 네트워크의 정확한 정보를 사용하여 사후 처리됩니다.
PPK는 실시간 보정에 의존하지 않기 때문에 데이터 수집에 더 많은 유연성을 제공합니다. 항공 매핑, 드론 매핑 또는 과학 연구와 같이 실시간 통신이 어렵거나 불필요한 시나리오에서 자주 사용됩니다.
차동 보정에 PPK를 사용할 때의 장점.
PPK는 GNSS를 처리할 때 다음과 같은 주요 이점을 제공합니다.
- 향상된 현장 워크플로: RTK 기반 미션의 주요 비용은 기준국이 근처에 있는지 확인하고, 필요한 경우 기준국을 설정하고, 안정적인 데이터 연결을 보장하는 등입니다. Qinertia에는 많은 수의 내장 CORS 네트워크와 타사 네트워크에 대한 직접 액세스가 있습니다. 따라서 기준국의 가용성을 확인하고 안정적인 데이터 연결을 설정하는 복잡성이 제거됩니다.
- 향상된 품질 관리: 많은 품질 지표가 처리의 실제 성능을 평가하는 데 도움이 됩니다. 여기에는 고급 통계, 분리(정방향 및 역방향 처리 중에 계산된 위치/자세 간의 차이) 및 GNSS 신호 지표가 포함됩니다.
- 전반적으로 향상된 성능: RTK Ambiguity 해결에는 어느 정도 시간이 걸릴 수 있습니다(기준국과의 거리 및 대기 조건에 따라 몇 초에서 몇 분까지). 이는 획득 시작 시 또는 까다로운 GNSS 조건에서 중요할 수 있습니다. PPK는 정방향 및 역방향으로 모두 처리하여 수정 속도를 최대화함으로써 이러한 영향을 완화합니다. 보다 진보된 알고리즘을 사용하거나 정확한 위성 궤도력을 사용하여 성능을 향상시킬 수도 있습니다.