Qinertia Lever Arm 모든 SBG 제품과 무료로 호환 가능
관성 항법 시스템(INS)을 설치할 때 INS와 GNSS 안테나 사이, 그리고 INS와 주행 거리계 또는 DVL과 같은 추가 센서 사이의 레버 암 구성은 실제적인 문제입니다.
이러한 작업을 간소화하고 효율성과 정확성을 향상시키기 위해 레버 암을 자동으로 재추정하도록 설계된 무료 레버 암 추정 도구인 Qinertia 레버 암 도구를 제공합니다. SBG Systems 사용자는 주의 깊은 수동 측정 없이도 대략적인 추정치로 IMU를 설치하고 나중에 이 도구를 사용하여 개선할 수 있습니다. 따라서 수동 측정이 필요하지 않습니다.
지금 사용해 보세요!
Qinertia 레버 암으로 SBG INS 설정을 간소화하십시오.
Qinertia의 레버 암 추정 도구는 GNSS 기본 및 보조 안테나 레버 암은 물론 DVL 또는 주행 거리계 레버 암을 포함하여 기계적 설치 파라미터를 정확하게 추정하고 개선하도록 설계되었습니다. 이는 정확한 수동 측정이 비현실적이거나 얻기 어려울 때 특히 유용합니다. Qinertia 레버 암을 사용하면 수동 조정의 번거로움 없이 보다 정확한 레버 암 값을 얻어 포지셔닝 정확도를 높일 수 있습니다.
최적의 결과를 얻으려면 충분한 다이내믹(예: 8자 패턴)과 양호한 개방된 하늘 환경에서 전용 데이터 수집 세션을 사용하는 것이 좋습니다. 이 도구는 실시간 GNSS 위치를 IMU 데이터와 느슨하게 결합된 방식으로 통합하며, 최상의 성능을 위해 실시간 GNSS RTK를 권장합니다.
Qinertia 레버 암은 MySBG 계정을 가진 모든 사용자가 무료로 사용할 수 있으며 모든 SBG 제품과 완벽하게 호환되므로 새로운 Ellipse를 완성하여 Ekinox, Apogee, Navsight 및 Quanta 시리즈와 같은 고성능 INS 제품에 내장된 실시간 기계적 추정 모듈에 대한 강력한 대안으로 사용됩니다.
Qinertia 레버 암의 모든 이점을 살펴보십시오.




레버 암이란 무엇입니까?
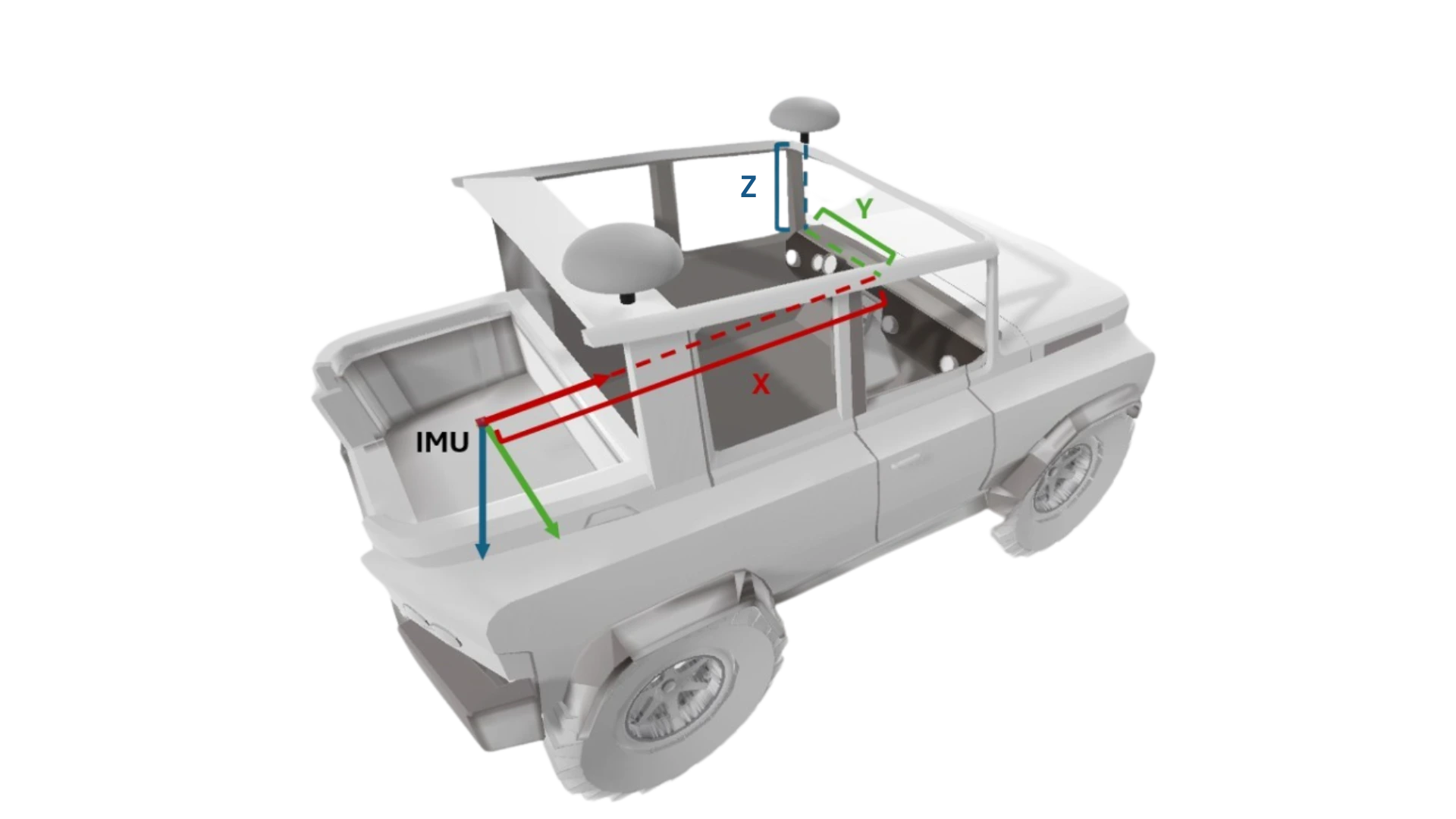
레버 암은 일반적으로 3D 벡터(X, Y, Z)로 표현되는 INS 기준점과 관련된 플랫폼의 GNSS 안테나 또는 기타 기준점의 위치 오프셋입니다. 이는 GNSS/INS 융합에서 매우 중요한데, GNSS는 안테나의 위치를 제공하는 반면 INS에서 계산한 자세 정보는 센서 자체 내에서 참조되기 때문입니다. 센서는 다른 위치에 설치됩니다.
안테나 위치와 INS 위치 사이의 이러한 오프셋은 이러한 점들이 움직이는 동안 서로 다른 다이내믹을 경험한다는 것을 의미합니다.
레버 암 측정의 작은 오류조차도 상당한 포지셔닝 부정확성을 초래할 수 있습니다. 전통적으로는 주의 깊은 수동 측정이 필요하며 실제로는 다음과 같은 몇 가지 문제가 있습니다.
– 인적 오류: 측정 시 작은 정렬 불량으로 인해 포지셔닝 계산에 누적 오류가 발생할 수 있습니다.
– 장착 지점에 대한 접근 어려움: IMU 및 GNSS 안테나가 접근하기 어려운 위치에 장착되어 정확한 측정이 어려울 수 있습니다.
– 시간 소모적인 프로세스: 높은 정확도를 보장하려면 여러 번의 확인 및 유효성 검사가 필요하므로 설치 프로세스에 추가 시간이 소요됩니다.
Qinertia의 전체 버전을 살펴보십시오.
이 새롭고 무료인 Qinertia 레버 암 도구가 포함된 차세대 INS/GNSS 후처리 소프트웨어입니다.
Qinertia의 전체 버전의 다양한 기능을 살펴보십시오.
