RTS(Rauch-Tung-Striebel)スムーザーは、動的システムにおける状態推定の精度を向上させるために使用される数学的アルゴリズムです。これは、平滑化アルゴリズムのファミリーに属し、リアルタイムでシステムの状態を推定するカルマンフィルターの機能を拡張します。カルマンフィルターはデータを順番に処理し、過去および現在の測定値のみに基づいて現在の状態を推定しますが、RTSスムーザーは、過去と将来の両方の測定値を使用して状態の推定値を事後的に改良することにより、さらに一歩進んでいます。このプロセスにより、特にデータの事後処理を伴うアプリケーションでは、状態推定が大幅に向上します。
RTSの仕組みは?
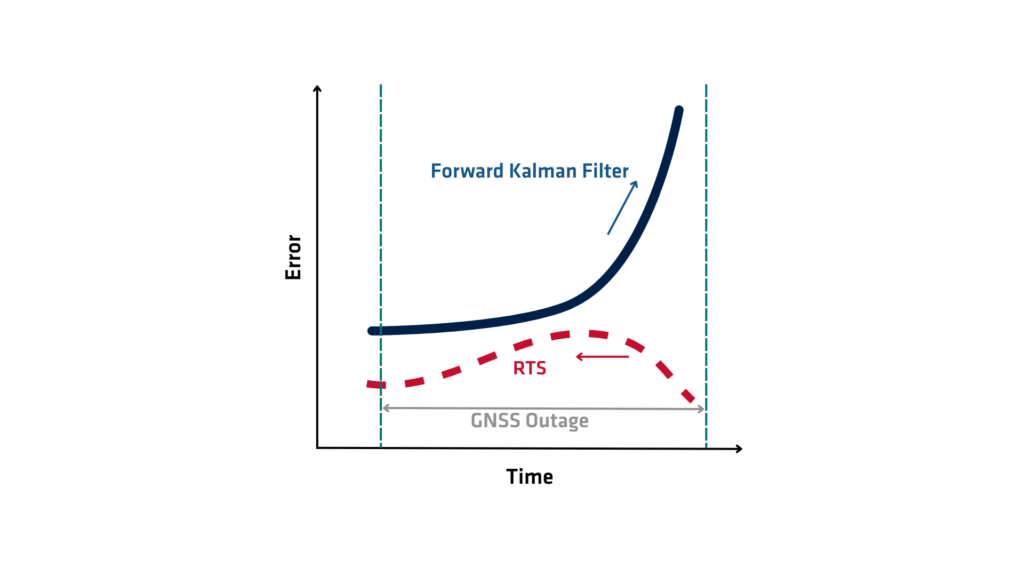
RTS(Rauch-Tung-Striebel)またはRTSスムーザーは、フォワードパスとバックワードパスの2つの主要な段階で動作します。フォワードパスでは、アルゴリズムは標準のカルマンフィルターをデータを通して実行し、各タイムステップで状態の推定値と関連する誤差共分散を収集します。この段階では、基本的に、各時点までの過去のデータのみに基づいて、初期状態の推定値と不確実性指標を提供することにより、基礎を築きます。
フォワードパスが完了すると、バックワードパスが開始されます。アルゴリズムは、最終状態の推定値から初期状態の推定値に向かって後退します。各タイムステップで、RTS(Rauch-Tung-Striebel)は、将来のタイムステップからの情報(フォワードフィルタリングプロセス中に利用できなかった情報)を組み込むことによって、状態の推定値を修正します。フォワードパスで計算されたカルマンゲイン、遷移行列、および共分散を使用して、過去と将来の観測の両方のバランスを取る平滑化された推定値を計算します。この後退的再帰は、フィルタリングされた推定値を修正し、全体的な推定誤差を減らし、システム状態の一貫性のある正確な軌跡を生成します
数学的には、スムーザーは、連続する推定値の誤差間の相関関係を利用する修正ステップを適用します。線形ガウス過程を通じてシステムの進化をモデル化することにより、RTSスムーザーは、カルマンフィルターで使用されるものと同じダイナミクスおよび測定モデルを想定しています。各ステップで平滑化ゲインを計算します。このゲインは、現在の推定値を調整するために将来の推定値をどれだけ使用する必要があるかを決定します。このゲインは、フィルタリングされた推定値の共分散行列と予測された状態に依存します。
RTS(Rauch-Tung-Striebel)の利点
RTS スムーザーは、システム状態のシーケンス全体に対してグローバルに最適な推定を生成します。モデルが線形およびガウスであると仮定します。フィルタリングは現在の状態のみを推定します。スムージングは、利用可能なすべてのデータを使用して、過去の最適な状態推定を再構築します。これにより、スムージングはオフラインアプリケーションにとって特に価値があります。
RTS スムーザーは、航空宇宙ナビゲーション、信号処理、金融、ロボット工学など、さまざまな分野で応用されています。たとえば、慣性航法システム(INS)では、ドリフトとノイズを低減するために、軌道データを後処理するためによく使用されます。同様に、時系列分析またはオブジェクト追跡では、リアルタイムの推定値を改良し、正確なパスまたはトレンドを復元するために使用されます。
RTS スムーザーは利点がありますが、完全なデータセットアクセスが必要であり、長くて複雑なデータの場合、計算負荷が高くなります。また、線形ダイナミクスとガウスノイズの仮定に大きく依存しています。システムが非線形またはノイズが非ガウスの場合は、拡張または無香料の RTS スムーザーを使用します。これらのバリアントは、拡張カルマンフィルター(EKF)や無香料カルマンフィルター(UKF)などの非線形フィルターにメソッドを適用します。
RTS スムーザーは、将来のデータを使用して過去の推定値を更新することにより、カルマンフィルタリングを改良し、精度と安定性を向上させます。状態推定の基礎を形成し、後処理されたデータを使用して動的システムを正確に再構築できます。