
NED(北-東-下)座標系は、ナビゲーションおよび慣性計測で広く使用されている参照系として機能します。
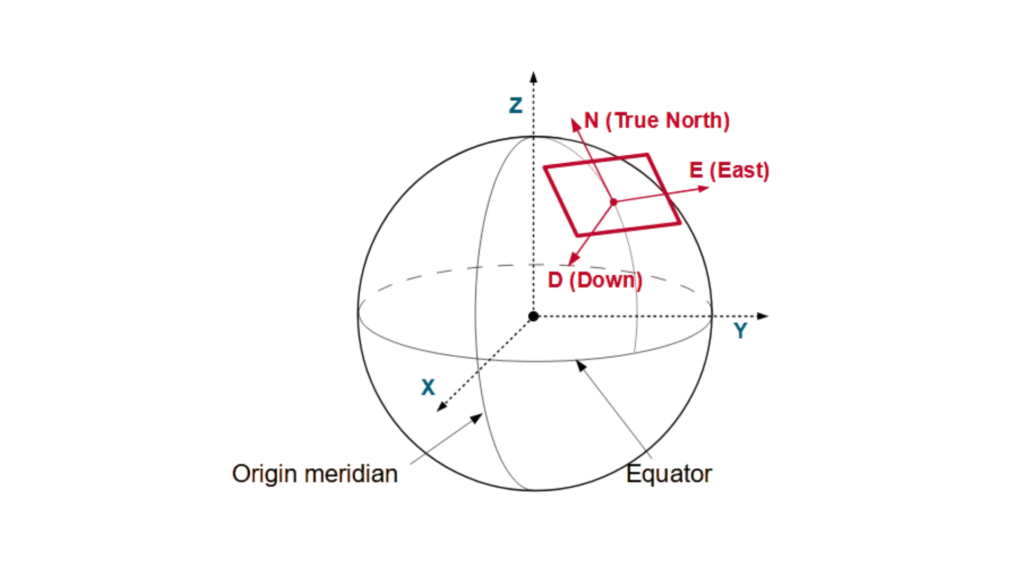
北-東-下(NED)フレームは、ECEF座標で定義されるローカル参照フレームとして機能します。通常、車両またはプラットフォームに固定されたままで、ボディフレームとともに移動します。このフレームは、WGS84楕円体モデルに基づいて、現在の場所で地球の表面に接する平面に北軸と東軸を配置します。
3つの直交軸で構成されています。北軸は真北を指し、下軸は地球の内部に向かって伸び(ローカルの上方向とは反対)、東軸は東を指すことによって右手系を完成させます(北に垂直)。
同様に、車両やプラットフォームは、システムとともに移動するEast-North-Up(ENU)フレームをローカルに持つことができます。NEDフレームとは異なり、ENUフレームは軸の向きが異なります。北軸は真北を指しますが、上向き軸は地球の内部から離れる方向に伸び、東軸は東を指すことによって、右手系のシステム配置を維持します。
この右手座標系は、自然な動きの方向に合わせることで、航空機、船舶、および自律走行車での計算を簡素化します。
NEDアプリケーションの用途
ドローンは、NED座標フレームワーク内でその軌道を計算するために、自動操縦システムに依存しています。ドローンが北向きに飛行している場合、その位置は北方向に増加します。逆に、ドローンが上昇すると、下方向が正であるため、下方向の座標値は減少します。
逆に、船舶のINS(慣性航法システム)は、NEDフレームに対する動きを追跡することによって機能します。船舶が東に移動すると、東座標が増加します。逆に、船舶が潜水すると、下方向の座標が増加します。
自動運転車は、NEDフレームを利用してその位置を特定します。車両が北に移動すると、車両の北座標が増加し、地形の隆起または窪みによって下方向の値が変化します。
精密誘導兵器は、NEDフレームに依存してその軌道を調整します。ミサイルがターゲットに向かって降下すると、下方向の座標が増加し、正確なターゲティングが保証されます。
AUV(自律型水中ビークル)は、NEDフレームを利用してナビゲートします。AUVが北東方向に移動すると、北座標と東座標の両方が増加し、深度の変化が下方向の座標に影響を与えます。
NEDシステムは、動きを地球の自然な方向に合わせるように開発されており、それによってナビゲーションを簡素化しています。このシステムは、エンジニア、パイロット、および科学者が、ポジショニング、ガイダンス、および制御アプリケーションの精度を高めるために利用しています。