
センサー座標系またはボディフレームは、ドローン、車両、ロボット、ミサイルなどのセンサーまたはプラットフォームとともに移動するローカル基準フレームです。センサーの物理構造に対する向きと動きを定義します。エンジニアは、ボディフレームを使用して、センサーの視点から直接、加速度、角速度、速度などの測定値を表現します。
センサー(機体)座標系(多くの場合、機体座標系または車両座標系と呼ばれます)は、ドローン、自動車、ミサイル、水中車両などの移動プラットフォームに固定された基準座標系として機能します。エンジニアはこの座標系を使用して、プラットフォーム自体の動きと姿勢を記述し、ナビゲーション、制御、およびセンサーフュージョンに不可欠なものとしています。
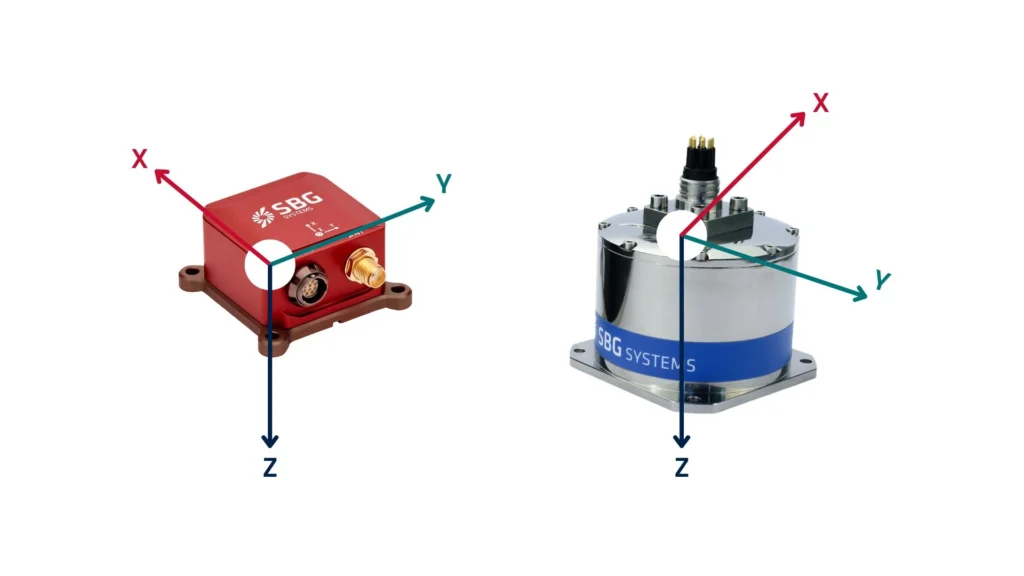
ほとんどのアプリケーションでは、ユーザーはIMU、GNSS受信機、またはAHRSユニットなどのセンサーを車両に直接取り付けます。これらのセンサーは、独自の座標系でデータを報告しますが、通常、これは機体座標系と一致します。これは、右手系の座標系を形成する3つの直交軸で構成されています。
- X軸は、モーションの方向またはセンサーのノーズの方向を指します。
- Y軸は、右(船舶または航空機システムの場合は右舷)を指します。
- Z軸は、アプリケーションに応じて、下向きまたはセンサーのベースに対して下向きを指します。
この固定された向きにより、システムは地球を基準にするのではなく、システム自身の空間内でどのように移動または回転するかを測定できます。
車体フレームアプリケーションの例
ドローンのIMUは、独自の基準座標系で加速度と回転を測定します。ドローンが前方にピッチングすると、Y軸を中心とした角速度を感知します。システムはこのデータをフライトコントローラーに送信し、ドローンが安定して飛行コマンドを正確に実行できるようにします。たとえば、ドローンの自動操縦システムは、機体座標系のセンサーデータを利用して飛行を安定させ、ヨー、ピッチ、ロールなどの操縦を実行します。システムは動きを直接解釈し、ドローン自身の座標系に対する前方、横方向、および垂直方向の動きとして表現します。
一方、自動運転車は、機体座標系におけるX(前方)、Y(横方向)、およびZ(垂直)軸に沿った直線加速度を検出します。この機能により、車両は速度を調整し、車線制御を維持し、地形の変化に対応できます。この座標系は、ライダー、レーダー、および慣性データの解釈を容易にします。車の制御システムは、これらの測定値を使用して、独自の姿勢に基づいてリアルタイムの運転判断を行います。
ミサイルのナビゲーションシステムは、姿勢追跡に機体座標系を利用します。ミサイルが操縦を行うと、搭載されたセンサーが機体に固定された軸で回転速度と加速度を検出し、正確なコース修正を可能にします。ミサイルの搭載ナビゲーションシステムは、機体座標系を利用して加速度と角速度を追跡し、現在の位置と座標系の姿勢に基づいて軌道と姿勢を調整できるようにします。
ロボットアームは、機体座標系を使用して、関節の動きとエンドエフェクターの位置を計算します。各モーターの位置と姿勢は、リアルタイム制御を保証するために、このローカル座標系で測定されます。
センサーのアライメントに関する課題
実際的なアプリケーションでは、センサーは必ずしもボディフレームと完全に一致しているとは限りません。これに対処するために、エンジニアはフレーム回転補正を頻繁に実装し、センサーの座標系を車両のボディフレームに合わせます。これにより、位置、速度、および向きに関連する計算で正確な読み取りが保証されます。これは、移動してその環境を感知するすべてのシステムにとって基本的なことです。リアルタイムのナビゲーション、制御、および安定化において重要な役割を果たし、航空宇宙、防衛、自動車、およびロボットシステムに不可欠です。
お客様のプロジェクトについてお聞かせください