当社の慣性航法システムは、ドイツのハンブルク港湾地域で3日間にわたる水路測量中にテストされました。SBG SystemsとMacArtney Germany GmbHは、測量船に完全なマルチビーム音響測深機測量構成を装備し、さまざまな困難な環境におけるSBG慣性システムの性能を示すために、さまざまなテストを実施しました。当社の海洋水深測量テストをご覧ください。
テスト条件
当初、生のINSデータはリアルタイムで記録され、Teledyne PDSの取得ソフトウェア内でRESON SeaBat 7125からのMBESデータとマージされました。その後、水路データはBeamWorx AutoCleanで後処理およびフィルタリングされました。
さらに、INSデータはSBGのPPKソフトウェアQinertiaを使用して処理されました。最後に、リファレンスは、緊密に結合されたハイエンド光ファイバーソリューションであるHorizonです。
この海洋水深測量テストにご協力いただいたMacArtney Germanyに感謝いたします。
海洋水深測量テストのキャリブレーション手順
海洋水深測量テスト中のSBG Horizonのモーションおよび軌跡データに基づくキャリブレーション。
インターフェースには、測量線、計算された水深測量、品質を示すレイヤー、および地形が含まれています。
キャリブレーションレポートと結果
SBG慣性航法システムは、ドイツのハンブルクで行われた3日間の水路測量中にテストを受けました。さらに、SBG SystemsとMacArtney Germany GmbHは、困難な条件下でのINS性能を評価するために、完全なマルチビーム音響測深機構成を搭載した測量船を装備しました。
テストされたセンサーには、Horizon、Apogee、Ekinox(Navsight Marineシリーズ)、およびEllipseが含まれていました。チームは生のINSデータをリアルタイムで記録し、Teledyne PDSを使用してReson SeaBat 725からのMBESデータとマージしました。
その後、Beam Worx AutoCleanで水路データを後処理およびフィルタリングし、QinertiaがINSデータ処理を処理しました。さらに、GISソフトウェアは、INSベースの水深測量計算と品質レイヤーを表示する3DモデルとインタラクティブなWebマップを生成しました。JavaScriptを使用してレイアウトをフォーマットしました。評価では、キャリブレーション結果、水深測量データ、軌道、および品質指標を対象とし、モーションおよび測位性能に焦点を当てました。
各海洋水深測量テストには、GNSS停止を伴う橋の下および水路測量、および強いうねりの中での運用が含まれていました。さらに、この調査では、生のINSログの疎結合および密結合後処理による測量の改善を分析しました。
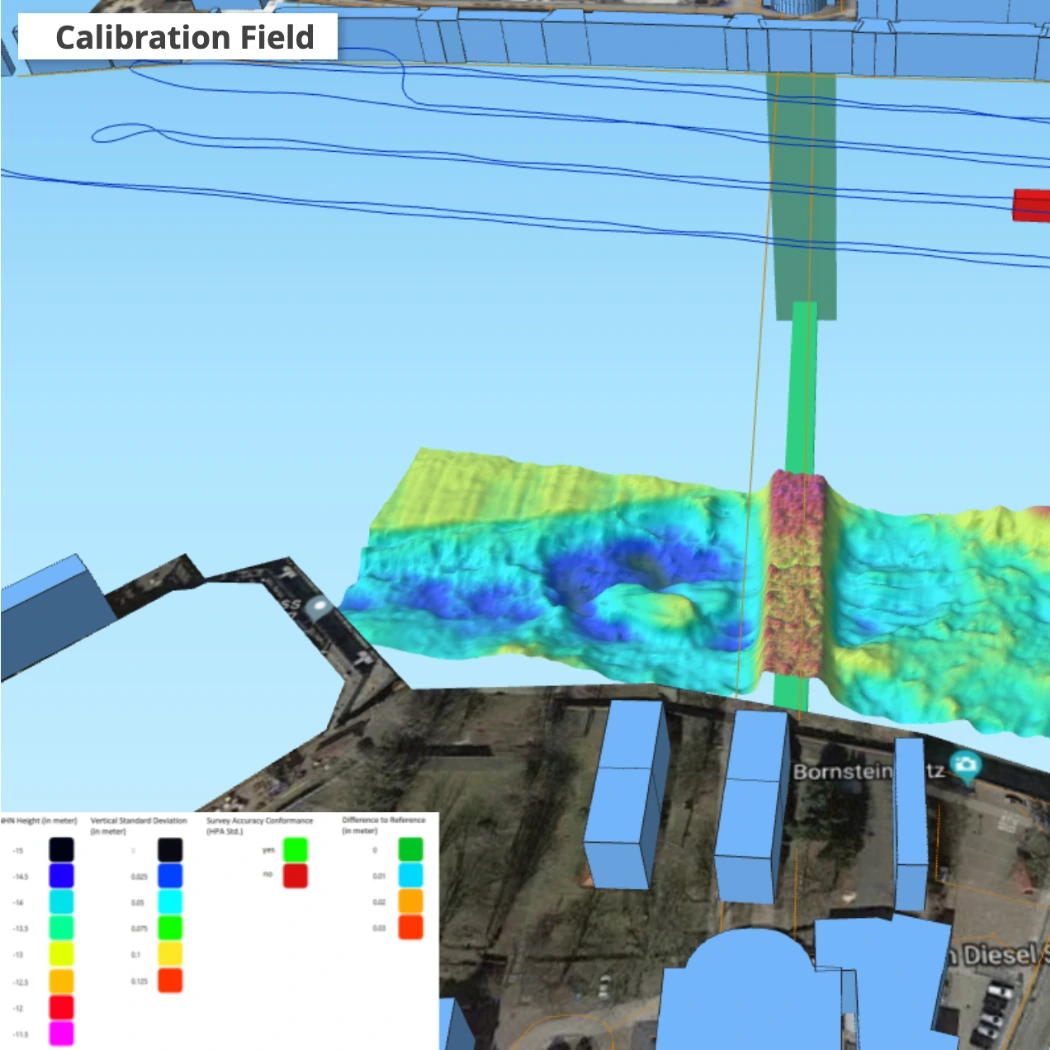
1 – モーションセンサーのキャリブレーションフィールド
モーションセンシングにおける高精度を保証するには、厳密なキャリブレーションが不可欠です。当社の慣性センサーは、バイアス、スケールファクター、およびミスアライメントを修正するために広範なテストを受けています。高度な多軸プラットフォームと制御された環境を使用することで、このプロセスは、広範囲の動作条件にわたってセンサーの精度と安定性を高めます。各センサーの応答を微調整することにより、キャリブレーションは、航空宇宙、海洋、自律ナビゲーションなどの要求の厳しいアプリケーションで信頼性の高いパフォーマンスを保証します。
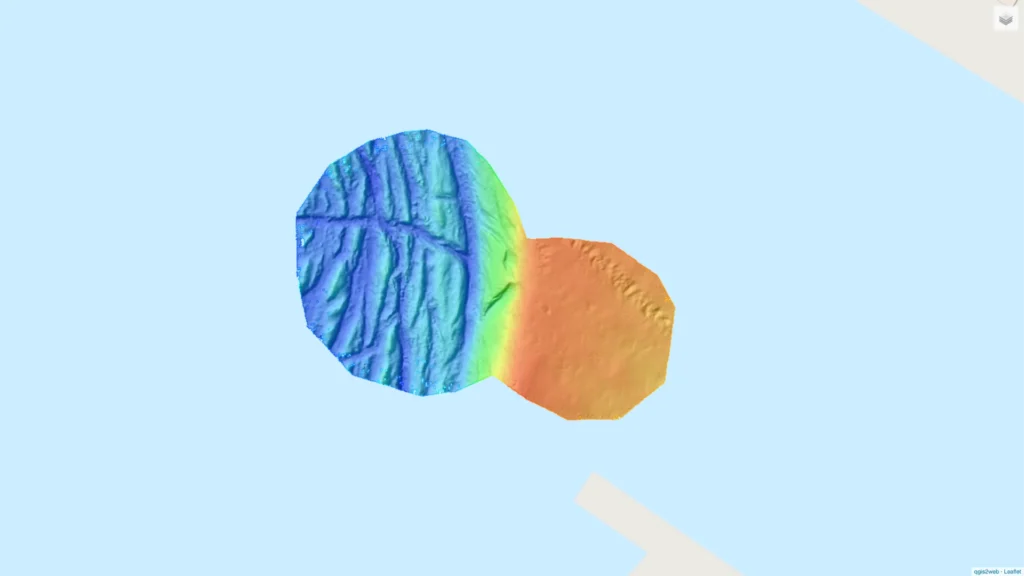
3Dモデル
SBG Horizonのモーションおよび軌跡データに基づいた、モーションセンサーキャリブレーション用のサーベイエリアの3D可視化。インターフェースには、サーベイライン、計算された水深、品質を示すレイヤー、地形的特徴が含まれています。
3Dサーベイマップ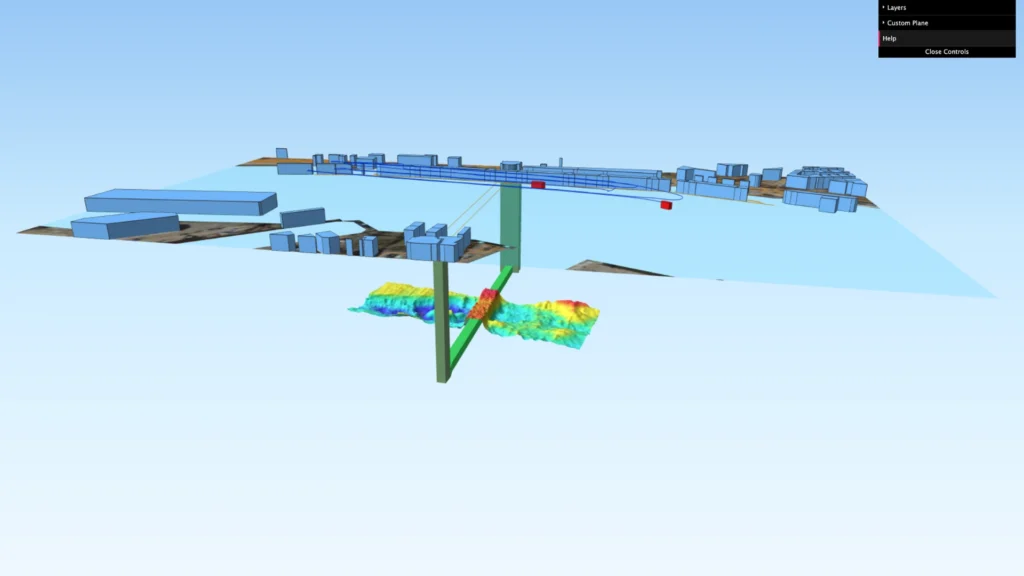
キャリブレーションレポート/オフセット
SBG慣性航法装置ごとのキャリブレーションレポートと推奨される取り付け角度。パッチ処理ソフトウェアBeamworX Autopatchは、これらのレポートをすべて生成します。アライメント サーベイ中に、チームは船舶の構成とセンサーのセットアップに基づいて各センサーのオフセットを測定し、Cremer Caplanを使用して評価しました。
高精度単独測位テスト
Qinertiaでの新しいPPP処理モードのテスト。水深測量サーフェスと品質レイヤーは、RTK(リアルタイム)およびPPP(後処理)INSソリューションに基づいて計算されています。
2 – 慣性試験
慣性センサーは、高い精度と信頼性を確保するために、管理された環境で厳格なテストを受けます。これらのテストでは、バイアス安定性、スケールファクター精度、ノイズレベル、動的応答などの主要なパフォーマンス指標を評価します。温度変化や振動プロファイルを含む実際の条件をシミュレートすることにより、エンジニアはセンサーの回復力と精度を検証します。最終的に、広範な慣性試験を通じて、メーカーは防衛、航空宇宙、および自律システムにおけるミッションクリティカルなアプリケーションに最適なパフォーマンスを保証します。
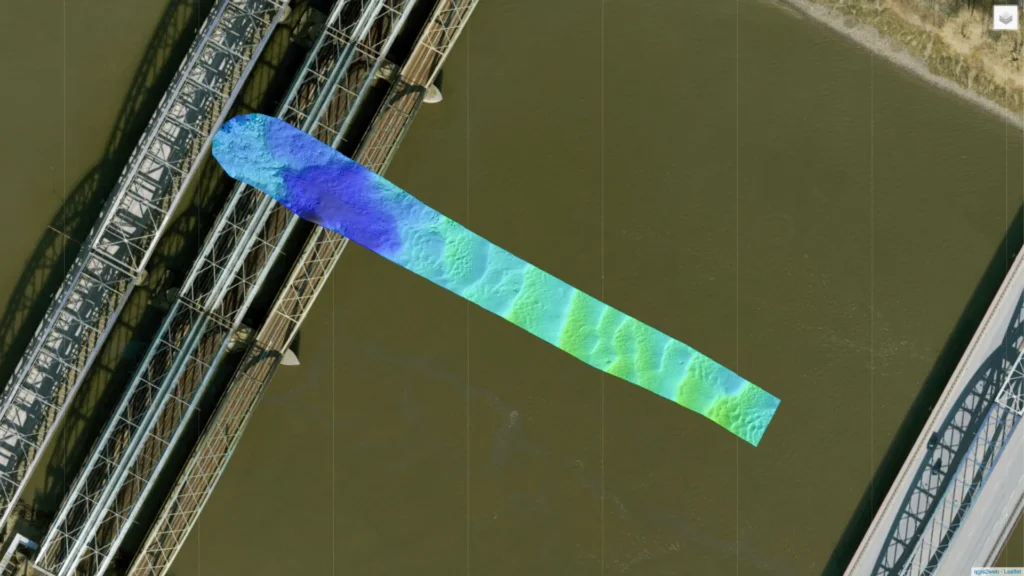
エルプブリュッケンウェブマップ
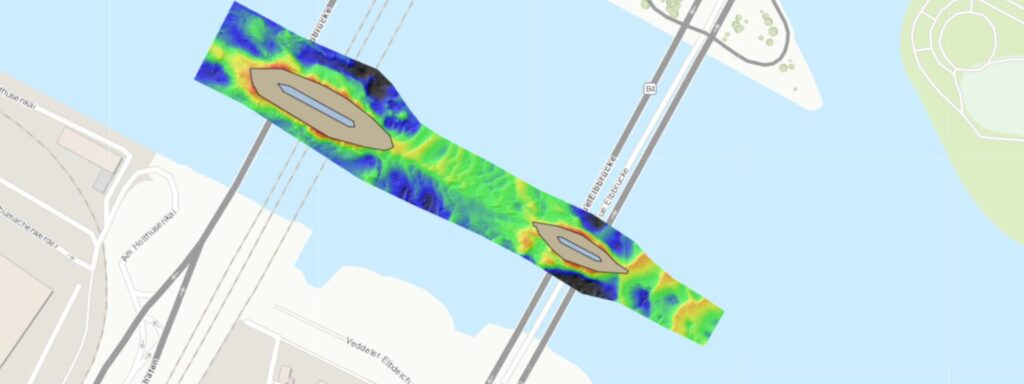
エルプブリュッケンの橋脚沿いのエルベ川の河川表面のウェブマップと、水深測量の品質評価、および軌跡。差分表面の基準は、緊密に結合されたHorizonソリューションです。比較センサーは、ハイエンドの光ファイバーシステムです。
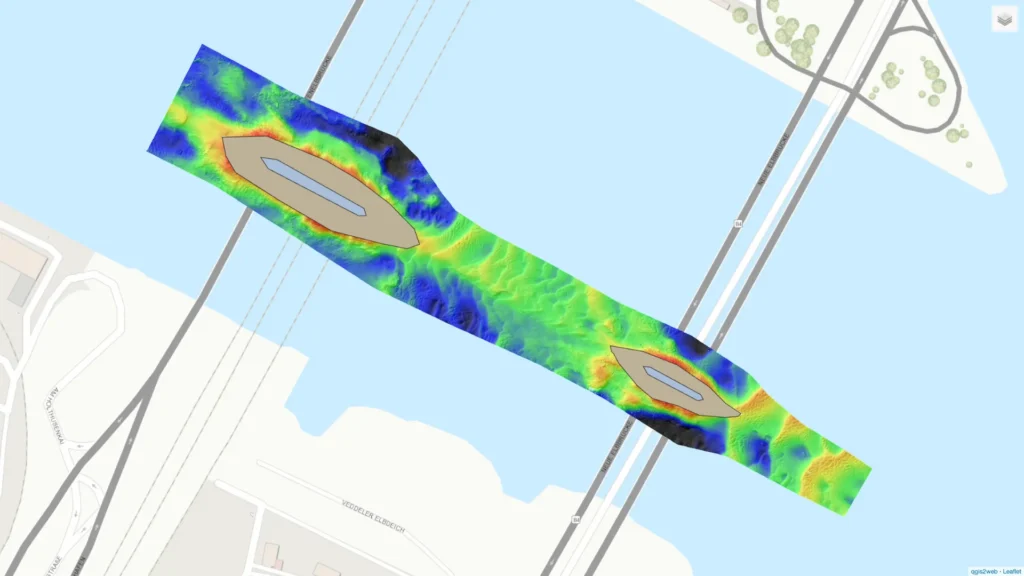
エルプブリュッケン3Dモデル
SBG Horizonの軌跡データに基づいた、ハンブルグのエルベ橋下の水深の3D可視化。インターフェースには、サーベイライン、計算された水深、品質を示すレイヤー、地形的特徴が含まれています。
エルプブリュッケン3Dモデル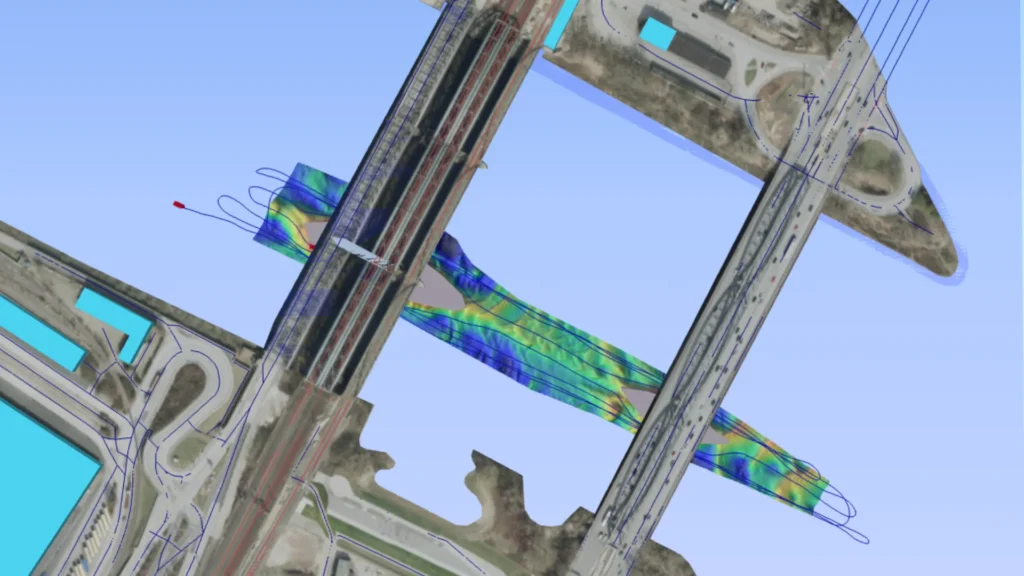
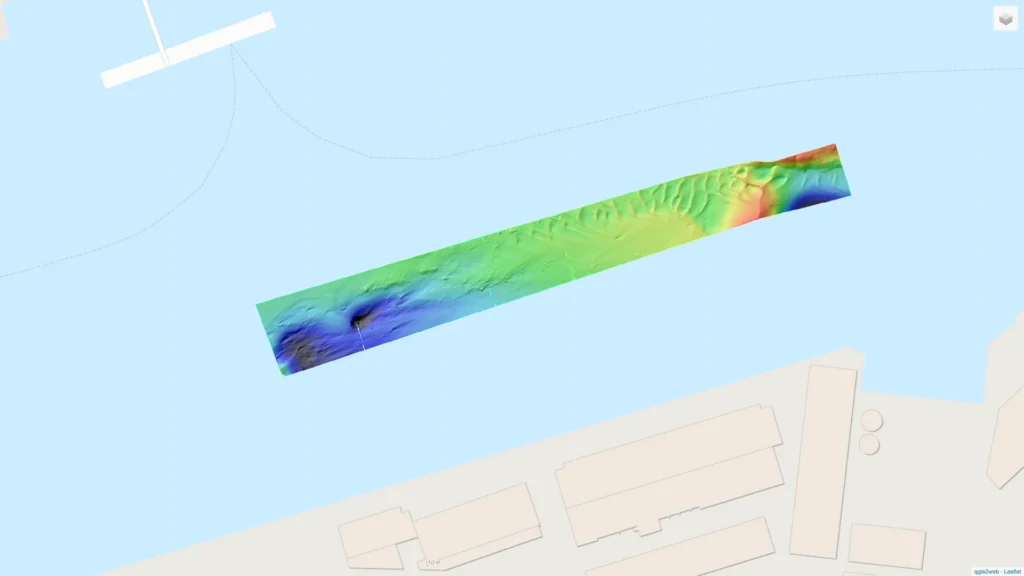
Speicherstadt webmap
Speicherstadtの運河沿いのエルベ川の河川表面のウェブマップと、水深測量の品質評価、および軌跡。差分表面の基準は、緊密に結合されたHorizonソリューションです。比較センサーは、ハイエンドの光ファイバーシステムです。
Speicherstadt水路の深浅測量3Dモデル
SBG Horizonの軌跡データに基づいた、シュパイヒャーシュタットの運河沿いの水深の3D可視化。インターフェースには、サーベイライン、計算された水深、品質を示すレイヤー、地形的特徴が含まれています。
Speicherstadt 3Dモデル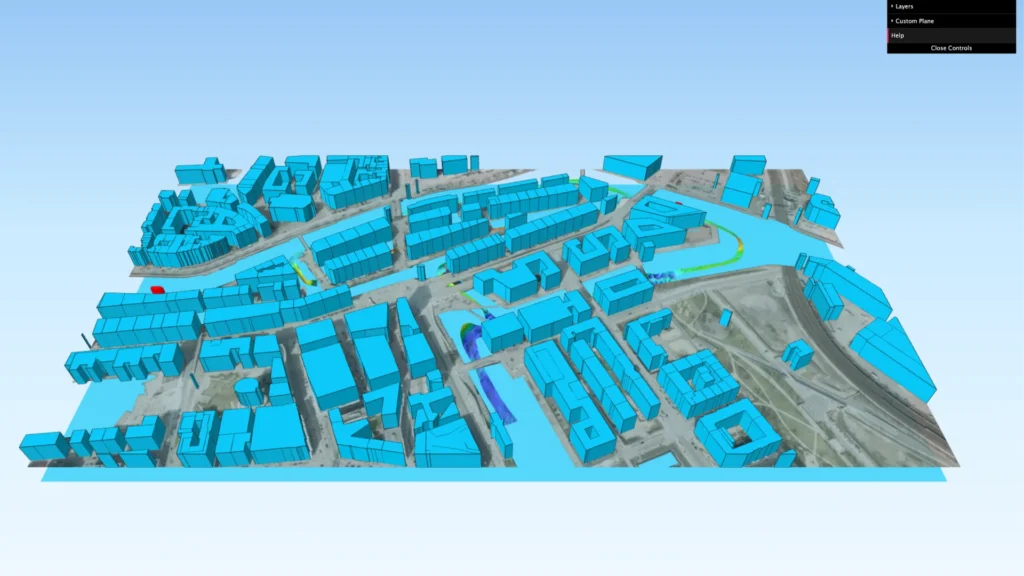
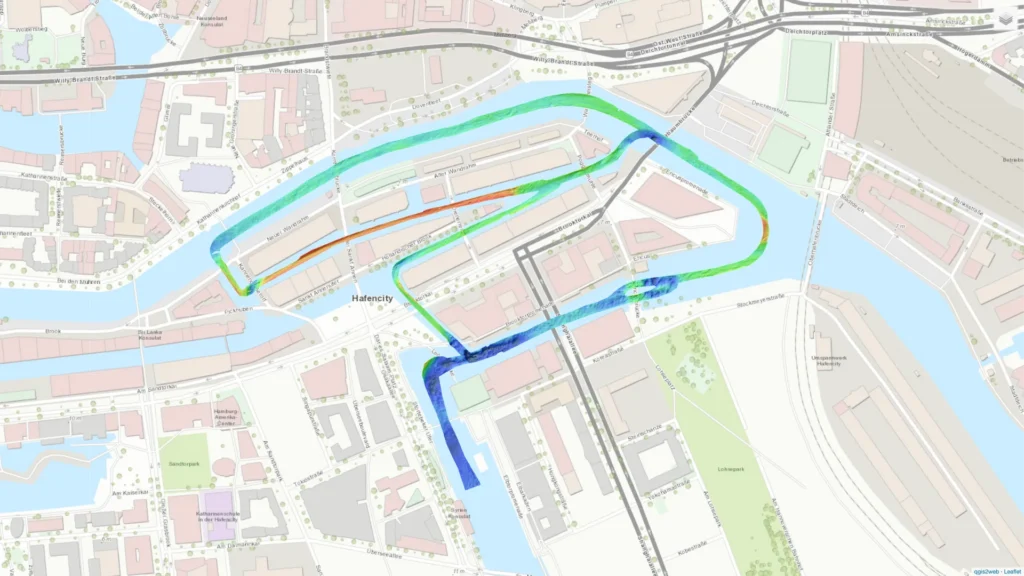
橋梁下180°ターン ウェブマップ
エルプブリュッケン沿いのエルベ川の河川表面のウェブマップと、水深測量の品質評価、および軌跡。このサーベイには、完全なRTK停止中に180°回転が含まれています。差分表面と比較システムの基準は、後処理された光ファイバーセンサーソリューションです。
3 – モーションテスト
これらのテストでは、実際のダイナミクスをシミュレートし、急速な加速、振動、回転運動などのさまざまな条件下での性能を評価します。センサーの応答を分析することにより、最も要求の厳しいアプリケーションで精度を最適化するために、キャリブレーションおよび補正アルゴリズムを改良します。
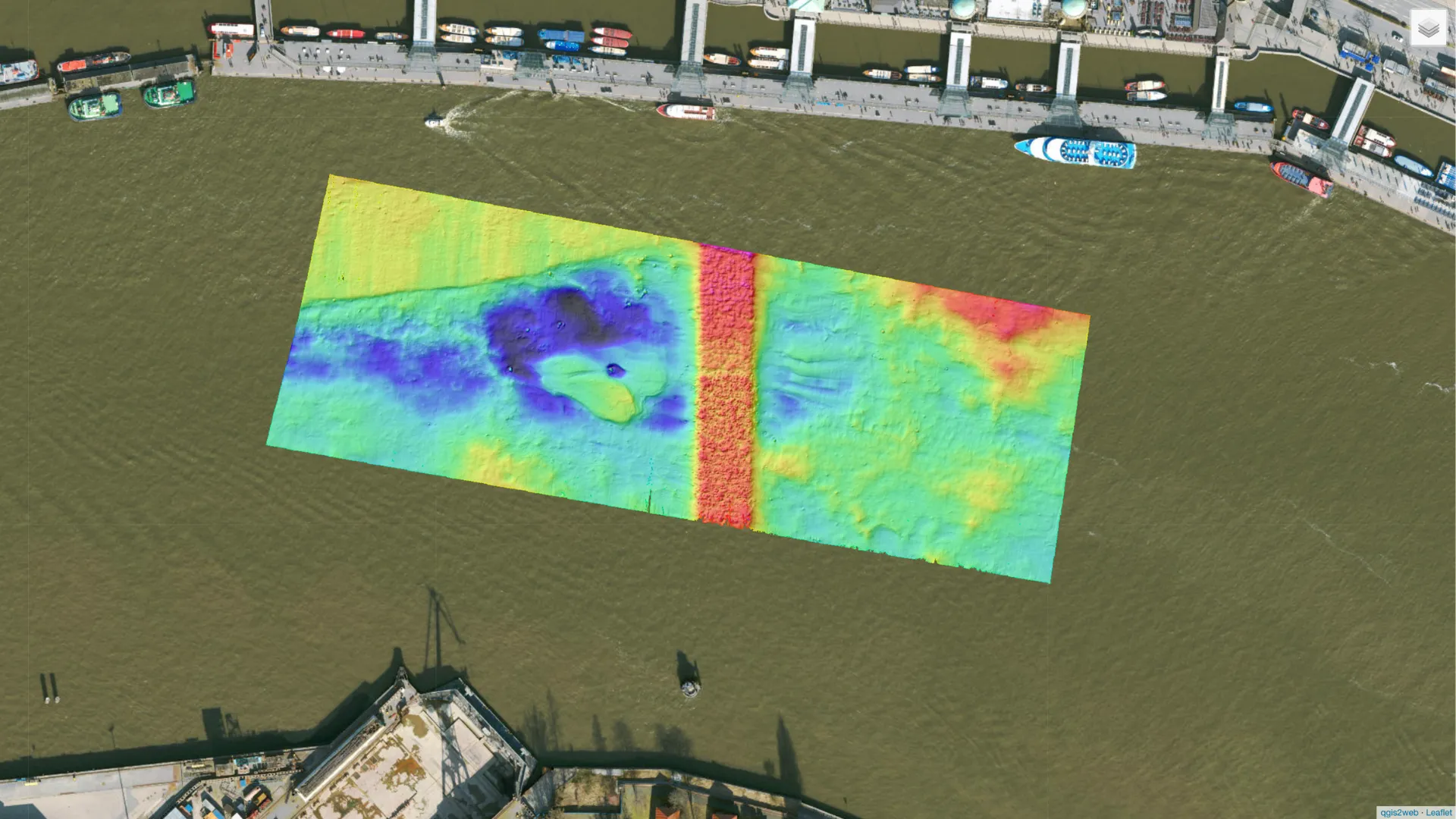
ハンブルグ港ドックのウェブマップ
エルベ川の河川表面のWebマップ(ハンブルク港のドックに隣接)、水深測量の品質指標、および軌跡。このテストでは、船舶の通過によって引き起こされるうねりによる動的なモーションパターンが記録されました。差分表面の基準は、リアルタイムの光ファイバーセンサーソリューションです。
ハンブルグ港ドックの3Dモデル
SBG Horizonの軌跡データに基づいた、ハンブルグ港のドックに隣接するエルベ川の水深の3D可視化。インターフェースには、サーベイライン、計算された水深、品質を示すレイヤー、地形的特徴が含まれています。
ハンブルグ港のウェブマップ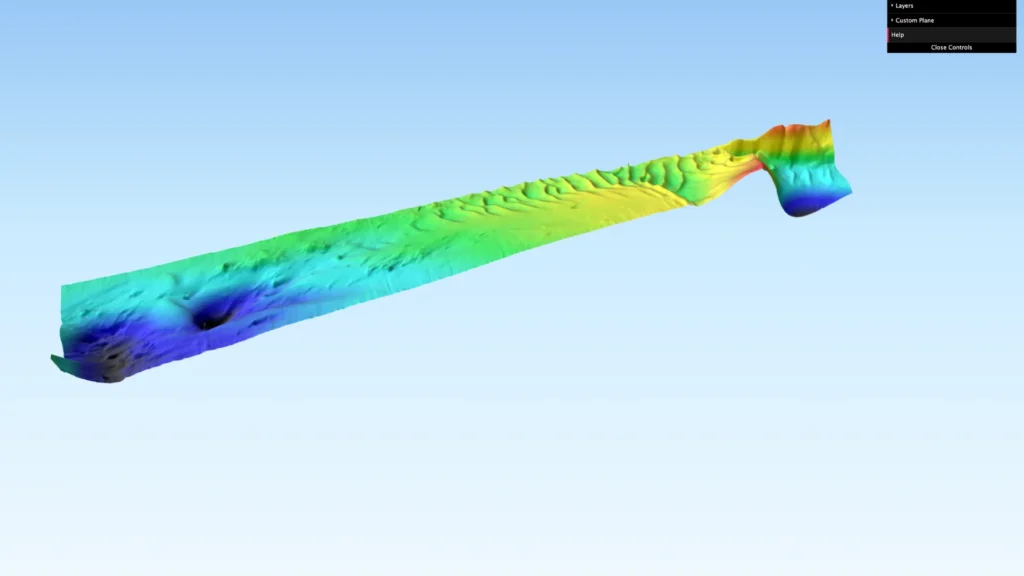
8 図の見出し ウェブマップ
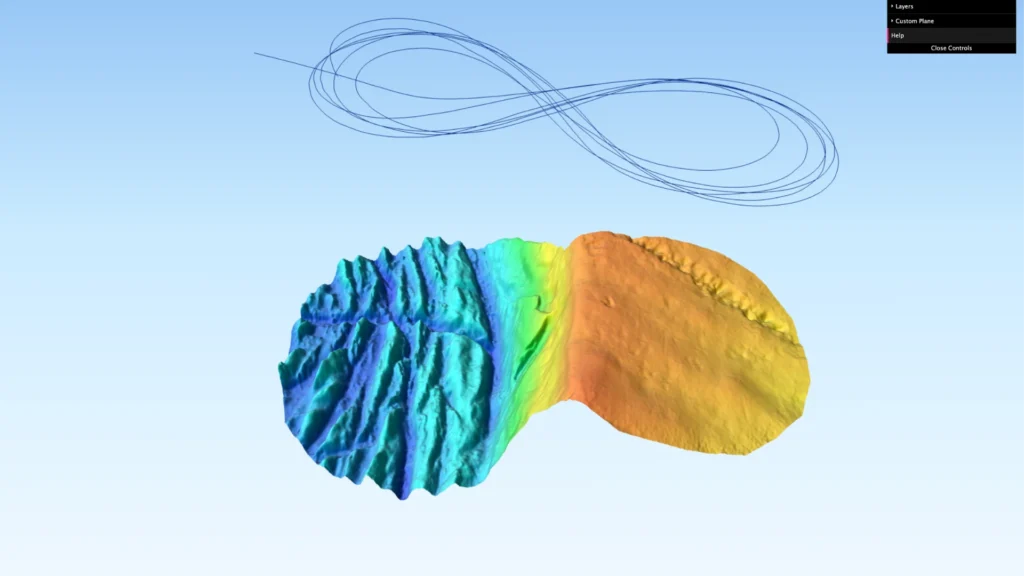
エルベ川の河川表面のWebマップ(8の字旋回時のもの)、水深測量の品質指標、および軌跡。この旋回は、特に海洋水深測量試験中のセンサーの船首方位性能に関する状態を示しています。差分表面の基準は、リアルタイムの光ファイバーセンサーソリューションです。
8 図の見出し 3Dモデル
SBG Horizonの軌跡データに基づいた、エルベ川の8の字機動中の水深の3D可視化。インターフェースには、サーベイライン、計算された水深、品質を示すレイヤー、地形的特徴が含まれています。
3Dサーベイモデルウェブマップ