
「Mastering Accuracy」シリーズの最初の記事では、Global Navigation Satellites Systems(GNSS)と、GNSSとその誤差要因を考慮したスタンドアロンの精度について解説します。
GNSSシステムとは?
GPSのような衛星ベースの測位システムは、私たちの車の旅やトレッキングを案内し、遍在するようになりました。また、自動運転車、農業、サーベイなどの多様なアプリケーションで重要な役割を果たしています。
ただし、「GPS」という用語から、GPS以外のすべての衛星コンステレーションを包含する、より包括的な「GNSS」(Global Navigation Satellite System:全球測位衛星システム)という用語に移行することが重要です。
現在、4つのグローバル衛星コンステレーション(GPS、GLONASS、GALILEO、BEIDOU)が運用されています。さらに、インドのIRNSSのような地域を対象とした補完的なコンステレーションや、日本のQZSSのようなグローバルなコンステレーションを補完するものがあります。
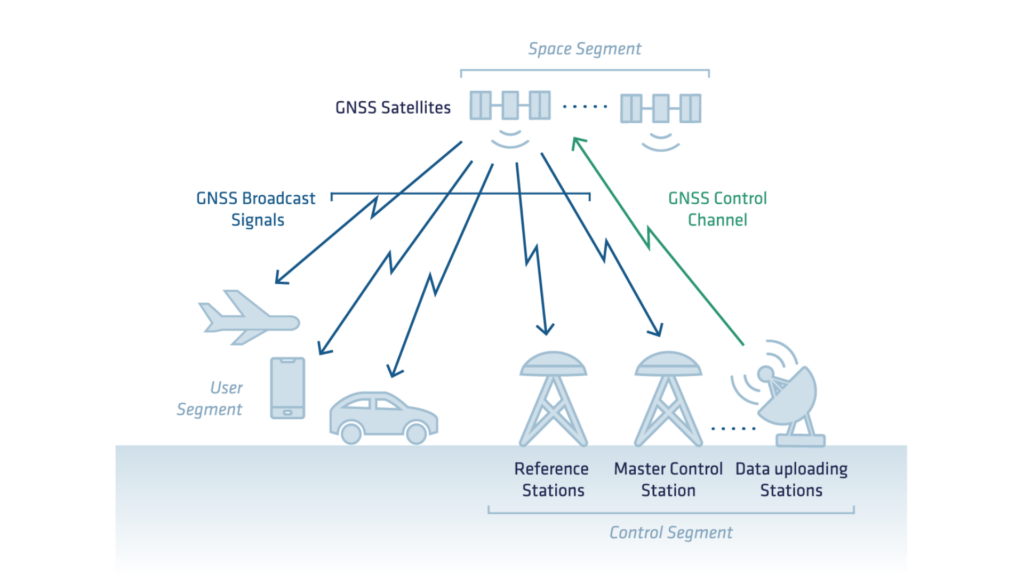
衛星とは別に、GNSSシステムは他の重要なセグメントで構成されています。
- 衛星コンステレーションを含む衛星セグメント。
- 地上管制局と機器で構成される管制セグメント。これらは、コンステレーションの監視、衛星の位置の決定、および継続的かつ正しい動作の保証を担当します。
- 衛星から受信した信号に基づいて位置を計算するために使用される機器を含むユーザーセグメント。
GNSSの基本原理:三辺測量
GNSSは、複数の衛星からの信号を使用して、三辺測量によって受信機の位置と時間を決定します。
位置を計算するには、システムは緯度、経度、高度、時間の4つの変数を解く必要があります。このプロセスには少なくとも4つの衛星が必要ですが、衛星を追加すると精度と信頼性が向上します。
次の図は、三辺測量の仕組みを示しています。各衛星は、それ自体を中心とした球を定義し、受信機までの可能な距離を表します。
2番目の衛星は、可能な解をこれら2つの球の交点に絞り込みます。3番目の衛星は、ソリューションをさらに絞り込み、システムが単一の場所を特定できるようにします。実際のアプリケーションでは、システムは時間も考慮する必要があるため、4番目の衛星が必要になります。
衛星から送信される信号
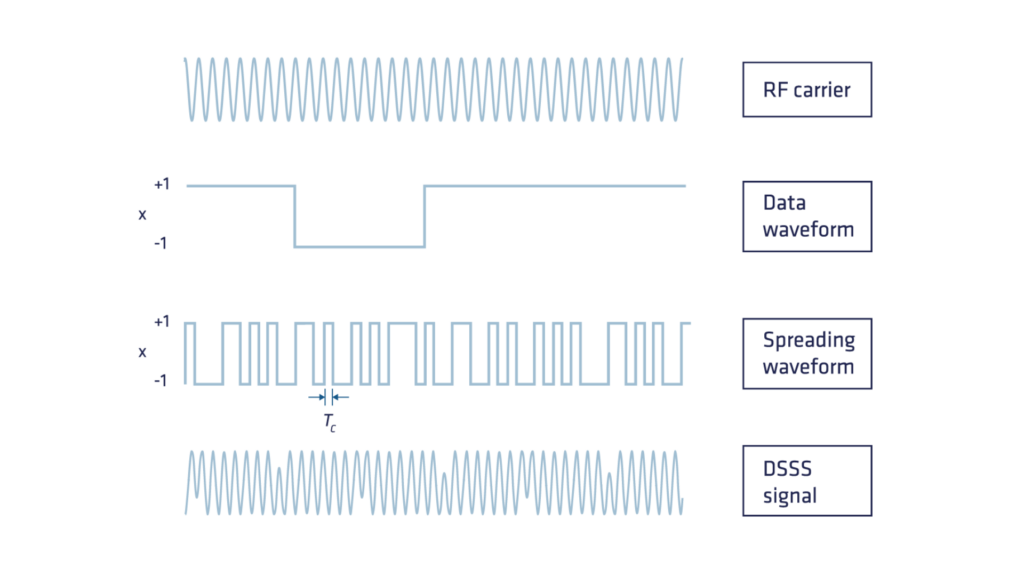
GNSS衛星は、L1、L2、L5などのさまざまな周波数帯域で信号を送信します。GNSS信号の基本的なコンポーネントは3つあります。
- ナビゲーションデータ(低周波):制御セグメントによって計算されるこのデータには、暦データ(衛星位置の計算に必要なケプラー軌道パラメータ)、クロック補正データ、および補足情報などの重要な情報が含まれています。衛星にアップロードされ、GNSS受信機にグローバルにブロードキャストされます。
- 疑似ランダムノイズコードまたはPRNコード: 各衛星は、一意の疑似ランダムノイズ(PRN)コードを送信します。これは、受信機が複製できるように予測可能なパターンで設計された0と1の高周波確定シーケンスです。PRNコードを追加する主な利点は、複数の衛星が同じ周波数で同時に信号を送信し、受信機で認識できるようになることです。符号分割多元接続(CDMA)として知られるこの手法では、各衛星に一意の疑似ランダムコードが割り当てられます。GlonassのみがFDMA(周波数分割多元接続)を使用し、各衛星の周波数がわずかに異なります。
- RF搬送波:元々はナビゲーションデータとPRNコードの結合信号を伝送するように設計された正弦波信号。このコンポーネントがどのように進化してGNSS信号の基礎となり、センチメートルレベルの測位精度を可能にするかについては、後で説明します。
衛星までの距離の測定:コードとキャリア位相
元々、GPSシステムは、受信機がPRNコードのレプリカと自己相関技術を利用して、サブメートル単位の精度で衛星-受信機間の距離を計算するように設計されていました。しかし、当初PRNコード伝送用であった搬送波は、非常に価値のある資産であることが判明しました。
搬送波位相測定は、より高精度であるものの、衛星と受信機間の距離を決定する際に曖昧さが生じました。以下に、両方の測定に関する詳細な説明を示します。
PRNコードによる衛星-受信機間距離の計算
GNSS受信機は、「Delay Lock Loop」と呼ばれるプロセスを使用して、送信されたコードと受信したコードの時間遅延を決定します。この時間遅延は、信号伝搬時間に対応し、光の速度を掛けることによって距離に変換されます。
ただし、受信機と衛星のクロックが同期されていないため、結果として得られる距離は擬似距離と呼ばれます。クロック同期エラーに加えて、擬似距離は、伝搬環境(大気、ハードウェアなど)に関連する他のいくつかのエラーの影響を受けます。これについては、この記事で後述します。
衛星-受信機間距離の改善:キャリア位相測定
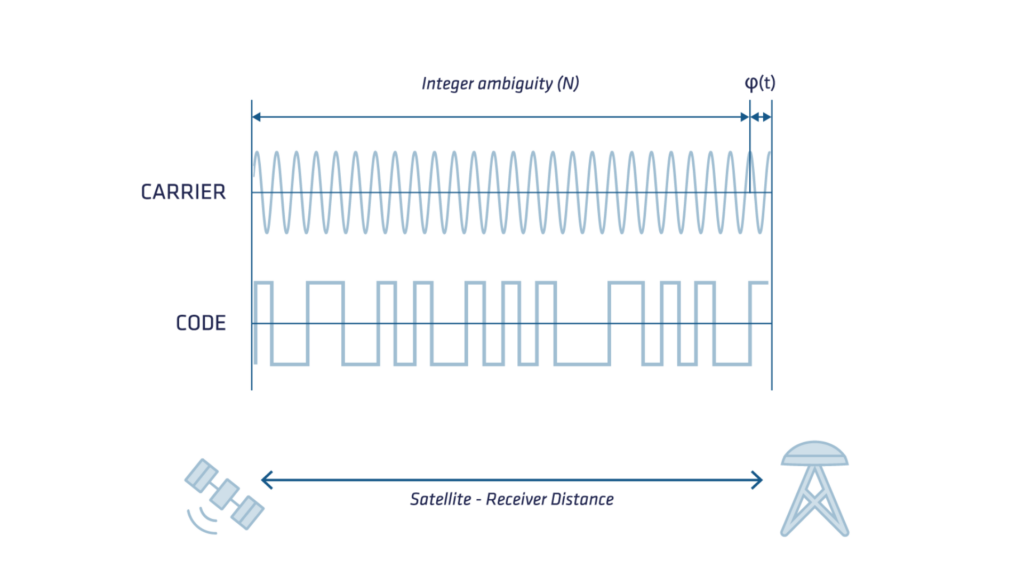
衛星と受信機間の距離は、信号の送信と受信の間で経過した位相サイクルの数をカウントし、これに搬送波の波長を掛けることによっても決定できます。
この測定はコードよりも2桁高い精度ですが、サイクル数(曖昧度とも呼ばれます)の一定の未知の整数が絶対精度に影響を与えます。搬送波位相の正確な変化を決定するために、GNSS受信機は、衛星から受信機への相対運動によって引き起こされる搬送波のドップラー周波数シフトを累積します。
信号が中断された場合、この累積プロセスは実際の動きと測定値の急激なジャンプを考慮できず、「サイクルスリップ」とも呼ばれる現象が観察されることがあります。
サイクルスリップと曖昧度を正しく処理することは、Real Time Kinematics(RTK)やPrecise Point Positioning(PPP)などの高精度測位技術の重要な側面です。
次の図は、信号搬送波、コード、およびそれぞれの解像度を示しています。
GNSSにおける誤差の要因
GPSの当初の一般公開精度(非軍事用)は約100mでした。長年にわたる進化(選択的可用性の除去、新しいコンステレーションとSBASシステムの展開、新しい衛星、および新しい周波数)により、スタンドアロンGNSSの精度は、エントリーレベルのGNSS受信機で5m、ハイエンドのGNSS受信機で1mになっています。
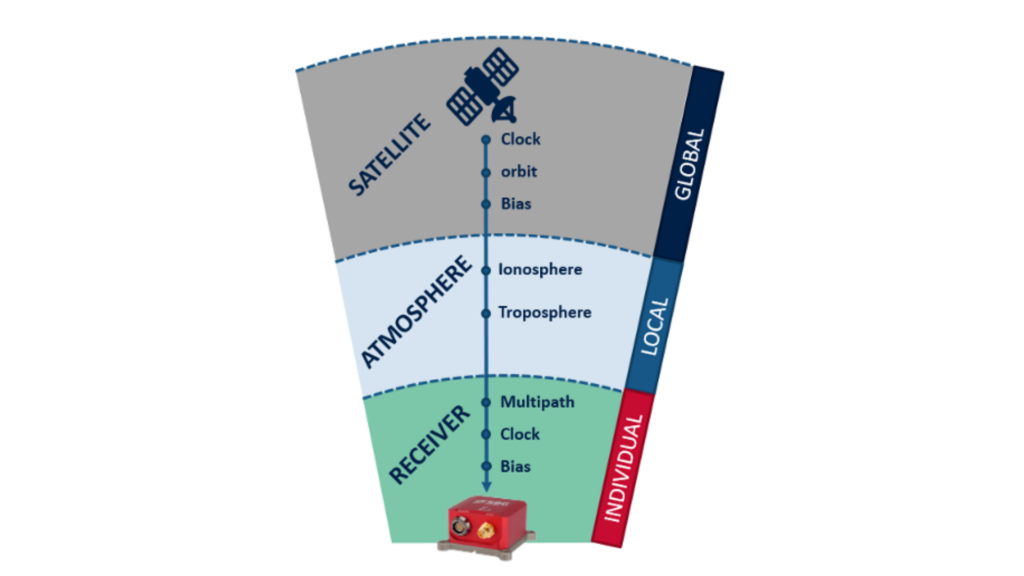
衛星の誤差
- クロック誤差:GNSS衛星の原子時計は非常に正確ですが、わずかなドリフトが発生します。残念ながら、衛星時計のわずかなずれでも、受信機で計算された位置に大きなずれが生じる可能性があります。たとえば、わずか10ナノ秒のクロック誤差でも、距離測定で3メートルの位置誤差が発生します。
- 軌道誤差:GNSS衛星は非常に正確で十分に文書化された軌道に従いますが、これらの軌道は衛星時計と同様にわずかな変動を受けます。クロックの不正確さと同様に、衛星軌道のわずかな変化でも、計算された位置に重大な誤差が生じる可能性があります。軌道内の残留誤差は存続し、最大±2.5メートルの潜在的な位置誤差の原因となります。
大気誤差
- 電離層遅延:地球上空50~1,000kmに位置する電離層には、電荷を帯びたイオンが含まれており、無線信号の伝送に影響を与え、位置誤差を引き起こします(通常±5m、電離層活動が活発な場合はさらに大きくなります)。電離層遅延は、太陽活動、昼夜、季節、場所によって変化するため、予測は困難です。
- 対流圏遅延: 地球のすぐ近くの大気層である対流圏では、湿度、温度、および大気圧の変化により遅延に変動が生じます。
受信機誤差
受信機の内部クロックは、衛星の原子時計と比較して精度が低く、他のハードウェアおよびソフトウェアのエラーとともに、測定にノイズとバイアスを加えます。
| 遅延 | 原点 | 大きさ |
|---|---|---|
| 位置誤差 | 衛星 | 5m |
| クロックオフセット | 衛星 | 0~300 km |
| 計測器の遅延 | 衛星 | 1-10 m |
| 相対性理論効果 | 衛星 | 10 m |
| 電離層遅延 | パス (50~1000 km) | 2~50 m |
| 対流圏遅延 | パス (0~12 km) | 2~10 m |
| 機器の遅延 | 受信機 | 1-10 m |
| クロックオフセット | 受信機 | 0~300 km |
最適なナビゲーションを確保するために、システムはこれらの誤差を考慮し、特定の誤差モデルを使用して軽減するか、ナビゲーションフィルターを通じて推定する必要があります。
位置計算では、潮汐効果や相対論的効果など、この記事に記載されていない他の多くの誤差項も考慮する必要があります。
さまざまな誤差要因がGNSSテクノロジーのパフォーマンスに影響を与え、非常に正確な測位、ナビゲーション、およびタイミングを提供します。
大気遅延、衛星時計とエフェメリスの誤差、マルチパス干渉、受信機ノイズなどの要因により、精度が低下する可能性があります。最新の補正技術(ディファレンシャルGNSS、RTK、PPP)はGNSSとその誤差要因を軽減するのに役立ちますが、それらの起源を理解することは、GNSSのパフォーマンスを最適化するために不可欠です。
信号処理、センサーフュージョン、および機械学習の進歩が進化し続けるにつれて、GNSSシステムはさらに堅牢になり、多様なアプリケーションでより高い信頼性を確保できるようになります。