慣性航法システム(INS)を設置する場合、INSとGNSSアンテナ間、およびINSとオドメーターやDVLなどの追加センサー間の正確なレバーアーム推定は、大きな課題となります。
レバーアームとは何ですか?
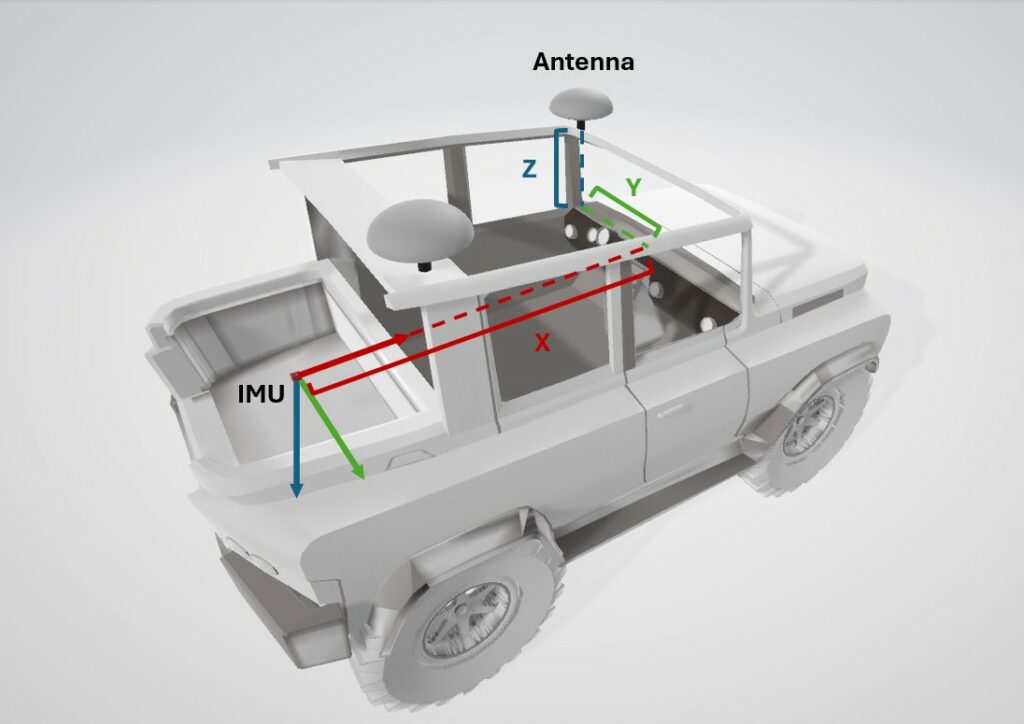
レバーアームとは、プラットフォーム上のGNSSアンテナまたはその他の基準点とINS基準点との位置オフセットであり、通常は3Dベクトル(X、Y、Z)として表されます。
正確なレバーアーム推定は、GNSS/INS融合において非常に重要です。GNSSはアンテナの位置を提供し、INSによって計算された姿勢情報はセンサー自体内で参照されるため、異なる場所に設置されます。
アンテナの位置とINSの位置の間のこのオフセットは、これらの点が運動中に異なるダイナミクスを経験することを意味します。
従来のレバーアーム推定における課題
レバーアームの推定におけるわずかな誤差でも、位置の精度に大きな影響を与える可能性があります。従来、これには注意深い手動測定が必要でしたが、実際にはいくつかの課題があります。
- 人的エラー: 測定におけるわずかなずれが、位置計算における累積誤差につながる可能性があります。
- 取り付けポイントへのアクセスが困難: IMUとGNSSアンテナは、アクセスが困難な場所に設置される場合があり、正確な測定が困難になります。
- 時間のかかるプロセス: 高い精度を確保するには、複数のチェックと検証が必要であり、インストールプロセスに余分な時間がかかります。
自動化ソリューション:Qinertia Lever Arm
このプロセスを簡素化し、効率と精度を向上させるために、Qinertia-leverArmという、レバーアームを自動的に再推定するように設計された無料のツールを導入します。これにより、注意深い手動測定の必要がなくなり、SBG Systemsのユーザーは、IMUをおおまかに設置した後、このツールで調整できます。
主な利点
Qinertia Lever Armは、レバーアームの推定において革新的なソリューションとなるいくつかの利点を提供します。このソリューションが際立っている主な利点は次のとおりです。
- MySBGアカウントをお持ちのすべてのユーザーが無料でアクセスでき、追加費用はかかりません。
- すべてのSBG Systems製品と互換性があります。
- 手動での精度は不要: おおよその測定値から始めて、Qinertia-leverArmでそれを改良します。
- 最小限の労力で向上した測位精度:PPKデータを使用して、動的にレバーアームを推定します。
- Qinertia-leverArmを使用すると、ユーザーはより正確なレバーアーム値を確保でき、手動調整の手間をかけずにポジショニングを改善できます。
完全なウォークスルーについては、以下のビデオをご覧ください。

Qinertia Lever Armを使い始める
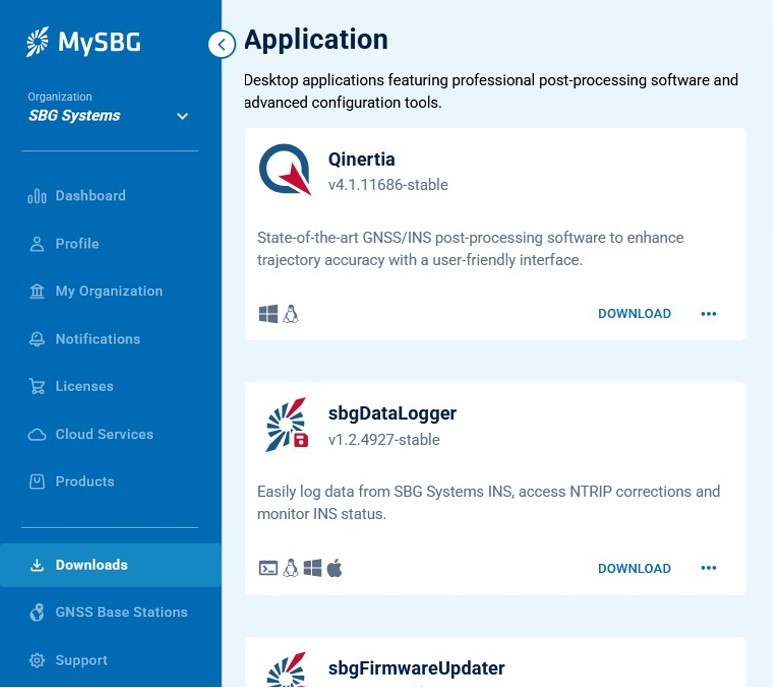
レバーアーム推定ツールを自分で試してみませんか?MySBGアカウントの「ダウンロード」セクションから、最新バージョンのQinertiaをダウンロードしてください。インストールしたら、Qinertiaレバーアームツールを起動するときにMySBGアカウントでログインするだけです。
MySBGアカウントをお持ちでない場合は、my.sbg-systems.com にアクセスして登録し、開始してください。