アクティブヒーブ補正について
AHC技術の中核は、モーションセンサー、油圧システム、および制御アルゴリズムを含む、さまざまなコンポーネントの統合に依存しています。通常、加速度計とジャイロスコープであるモーションセンサーは、船舶の動きを継続的に監視し、海洋波によって引き起こされるヒーブを検出します。
収集されたデータは制御システムに送信され、そこで情報が処理され、昇降装置の位置に必要な調整が決定されます。
次に、油圧システムが補償装置を作動させ、持ち上げられる荷物の高さを動的に調整し、船舶の動きを打ち消します。これにより、船舶の垂直方向の動きに関係なく、荷物は安定した状態を保ち、希望する深度に維持されます。AHCを採用することで、オペレーターは機器を正確に制御し、海洋作業中の事故や損傷のリスクを最小限に抑えることができます。
ソリューションを見る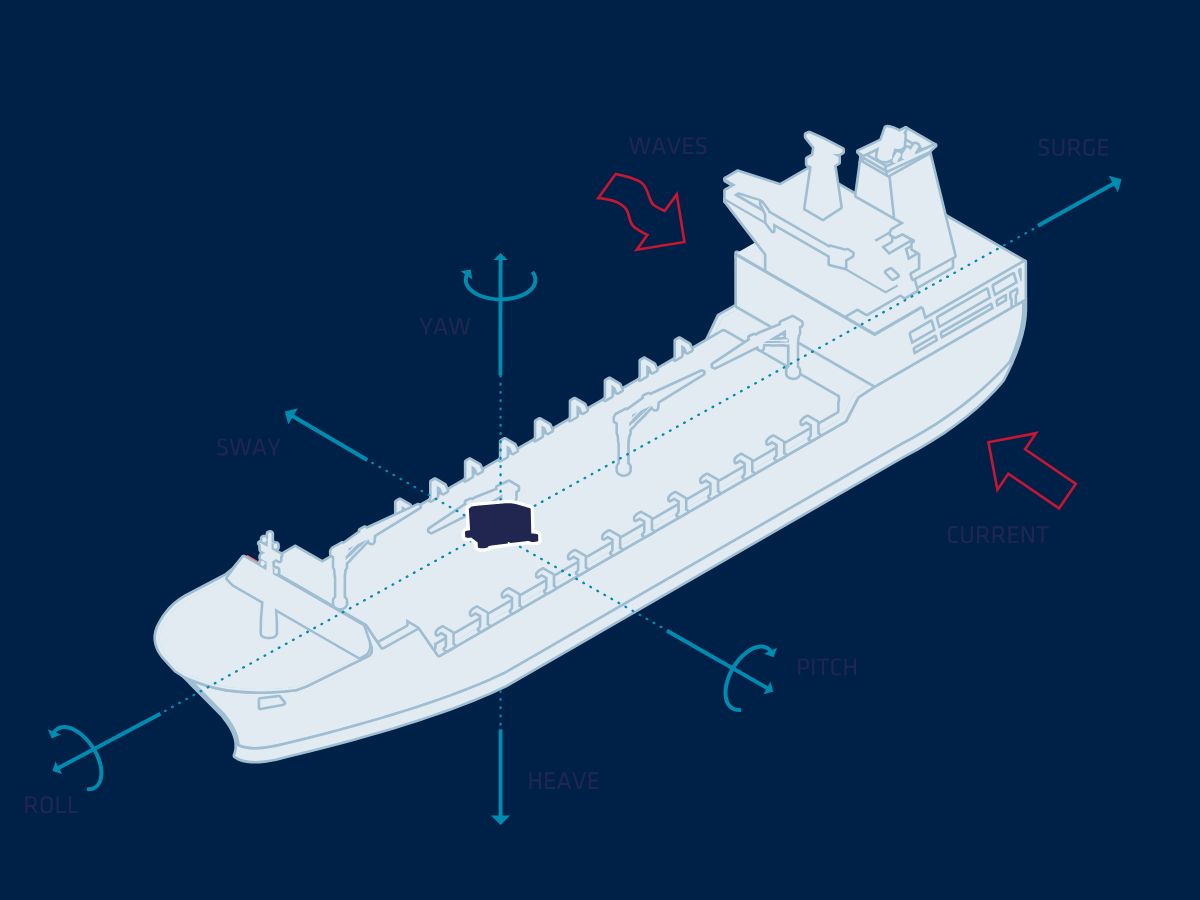
AHCシステム向けのSBG Systems製センサーの利点
当社のセンサーをActive Heave Compensation(AHC)システムに組み込むことで、海洋作業に数多くのメリットをもたらします。第一に、AHCモーションセンサーは、安定した作業プラットフォームを維持することにより、作業中の事故や怪我のリスクを軽減し、人員と機器の両方を保護します。その結果、安全性と効率が向上し、運用コストが削減され、ダウンタイムが短縮されます。その結果、運用がより費用対効果が高くなり、時間と費用の両方を節約できます。
さらに、Active Heave Compensationシステムは、さまざまな船舶や機器に統合できるため、さまざまなアプリケーションに対応できる汎用性の高いソリューションです。

波の影響を打ち消す正確なモーションセンサー
慣性システムは、海洋作業におけるActive Heave Compensation (AHC) に不可欠です。動的な海洋環境における装置の安定性と精度を向上させます。これを実現するために、AHCシステムは、波による動揺の影響を打ち消し、円滑かつ安全な作業を確保するために、船舶の動きに関するリアルタイムデータを利用します。
ACHシステムは、慣性計測ユニット(IMU)および慣性航法システム(INS)を利用して、船舶の動きを測定および分析することにより、この重要なデータを提供します。クレーン作業のコンテキストでは、慣性システムは、クレーンの位置の自律的な調整を容易にし、それによって危険な振動のリスクを軽減し、荒れた海の状態での荷物の安全な取り扱いを保証します。
お客様のプロジェクトについてお聞かせください
アクティブ・ヒーブ・コンペンセーションのソリューション
当社の慣性ソリューションは、動的な海洋環境における運用効率と精度を向上させるように設計されています。当社の高度なモーションセンサーは、波やうねりによる動きを打ち消すために、リアルタイムで正確なデータを提供します。高性能な慣性計測ユニット(IMU)と最先端のアルゴリズムを統合することで、シームレスな動きの補正を提供し、困難な条件下でもスムーズな運用を保証します。

Ellipse Micro AHRS

OEM Ellipse-A

Ellipse-N

Ellipse-D

Ekinox Micro
地理空間アプリケーションのパンフレット
パンフレットを直接受信箱に届けます。
事例紹介
当社のアクティブ・ヒーブ・コンペンセーション・ソリューションが、事例集を通じて海洋オペレーションをどのように変革してきたかをご覧ください。これらの実世界の事例は、多様なアプリケーションにおける当社の製品の有効性を明確に示しています。当社のモーションおよびナビゲーションシステムを貴社のオペレーションに統合することの利点をご紹介します。



SBG Systemsについて
当社の技術を採用したイノベーターや顧客からの直接の声をお聞きください。彼らの証言や成功事例は、当社のセンサーが実際のUAVナビゲーションアプリケーションに与える大きな影響を明確に示しています。
その他のオフショアアプリケーションを見る
SBG Systemsの高度な慣性航法ソリューションは、さまざまな海洋業務で信頼できます。当社のセンサーは、最も要求の厳しい海洋環境でも、海洋エネルギー、港湾管理、海底検査向けに、信頼性の高い位置、姿勢、およびモーションデータを提供します。
ご質問はありますか?
FAQセクションへようこそ!ここでは、ご紹介するアプリケーションに関する最も一般的な質問への回答をご覧いただけます。お探しの情報が見つからない場合は、お気軽にお問い合わせください。
アクティブおよびパッシブ・ヒーブ補正の違いは何ですか?
アクティブ・ヒーブ・コンペンセーション(AHC)とパッシブ・ヒーブ・コンペンセーション(PHC)はどちらも、波によって引き起こされる船舶の動きを軽減するために使用される方法ですが、動作原理が根本的に異なります。
パッシブ・ヒーブ補正(PHC)
- メカニズム:ばね、ダンパー、アキュムレーターなどの機械的または油圧システムに依存して、船舶の動きを吸収および相殺します。
- エネルギー源: 外部電源を必要としません。システムの自然な動きと、システムに作用する力を使用して調整します。
- 制御:非適応型、システムのパフォーマンスは事前設定されたパラメーターに基づいており、変化する海洋条件に動的に適応できません。
- アプリケーション:安定した予測可能な環境、または正確なモーションコントロールがそれほど重要でないオペレーションに最適です。
アクティブ・ヒーブ・コンペンセーション(AHC)
- メカニズム:リアルタイムセンサーとアルゴリズムによって制御されるモーター、油圧装置、またはその他の動力付きアクチュエーターを使用して、船舶の動きに積極的に対抗します。
- エネルギー源: アクチュエータと制御システムを駆動するために外部電源が必要です。
- 制御:センサーからの適応的なリアルタイムフィードバックにより、動的な海洋条件を補正するための正確な調整が可能になります。
- アプリケーション:水中建設、油井介入、科学研究など、高精度を必要とするオペレーションに最適です。
AHCは、精密な制御と船舶の動きの積極的な補正を必要とするアプリケーションに最適です。一方、PHCは、精度がそれほど重要ではなく、受動的な動きの吸収で十分な場合に、よりシンプルで費用対効果の高いソリューションを提供します。
洋上クレーンにおけるAHCとは何ですか?
クレーンにおけるアクティブ・ヒーブ・コンペンセーション(AHC)は、波によって引き起こされる船舶の垂直方向の動きを打ち消すために使用される技術です。これにより、クレーンで持ち上げたり下げたりする荷物が安定した状態を保ち、海の動きの影響を受けないようにします。
AHCシステムは、ダイナミックな海洋条件下で、クレーンが重機、貨物、または海底デバイスを船舶またはプラットフォームから持ち上げたり下ろしたりすることが多いオフショア作業において特に重要です。これらのシステムは、波の作用によって引き起こされる船舶のヒーブ(垂直運動)を測定するために、センサー(加速度計、ジャイロスコープ、またはモーションリファレンスユニットなど)を使用します。
このリアルタイムデータに基づいて、クレーンのAHCシステムは、うねりを打ち消すためにウインチまたは巻き上げ機構を自動的に調整し、荷重が海底または固定基準点に対して一定の位置に留まるようにします。オフショア クレーンは通常、これらの正確な調整を行うために油圧または電気システムを使用します。クレーンのウインチまたはホイストは、船の動きと同期して荷重を昇降させるように迅速に調整され、波によって引き起こされる垂直方向の動きを効果的に「打ち消し」ます。
AHCは、吊り上げまたは下降作業中に負荷を安定させることにより、事故、負荷の揺れ、または機器の損傷のリスクを最小限に抑えます。特に海底構造物の配置中や、繊細な機器の取り扱い時に、より安全で正確な作業を可能にします。