
O sistema de coordenadas NED (North-East-Down) serve como um sistema de referência amplamente utilizado para navegação e medições inerciais.
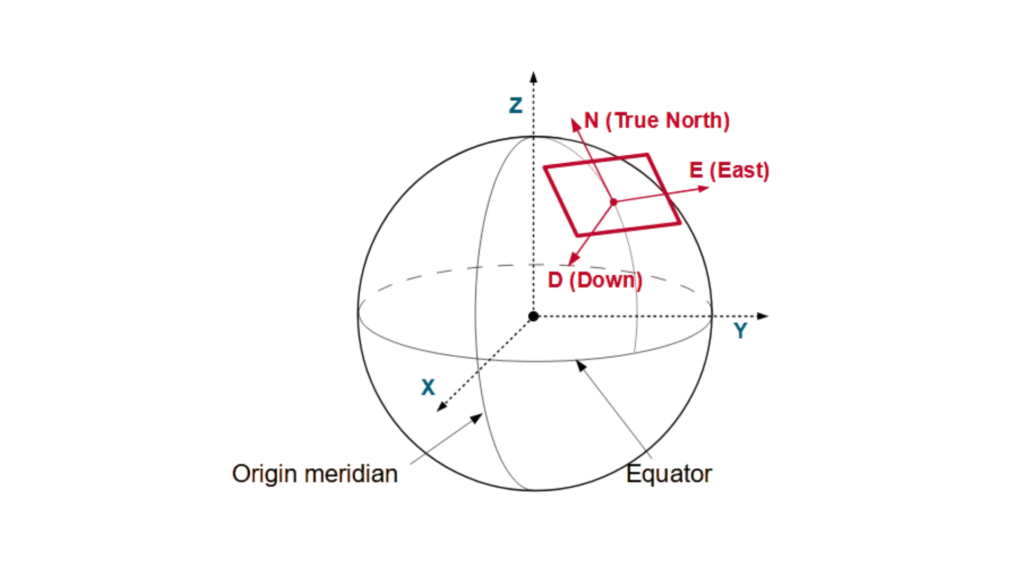
O sistema North-East-Down (NED) serve como um sistema de referência local, definido por suas coordenadas ECEF. Normalmente, ele permanece fixo ao veículo ou plataforma e se move com o corpo. Este sistema posiciona os eixos Norte e Leste em um plano tangente à superfície da Terra em sua localização atual, com base no modelo elipsoide WGS84.
Consiste em três eixos ortogonais: o eixo Norte aponta para o Norte Verdadeiro, o eixo Down se estende em direção ao interior da Terra (oposto à direção Up local) e o eixo Leste completa o sistema destro apontando para o leste (perpendicular ao Norte).
Da mesma forma, um veículo ou plataforma pode ter o sistema de referência East-North-Up (ENU) anexado localmente, movendo-se com o sistema. Diferentemente do sistema de referência NED, o sistema ENU orienta seus eixos de forma diferente: o eixo Norte ainda aponta para o Norte Verdadeiro, mas o eixo Up se estende para longe do interior da Terra, enquanto o eixo Leste mantém seu alinhamento de sistema destro apontando para o leste.
Este sistema de coordenadas destro simplifica os cálculos para aeronaves, embarcações marítimas e veículos autônomos, alinhando-se com as direções naturais de movimento.
Aplicações NED utilizam
Um drone depende de um sistema de piloto automático para calcular sua trajetória dentro da estrutura de coordenadas NED. Quando o drone está em um voo para o norte, sua posição aumenta na direção Norte. Por outro lado, quando o drone sobe, seu valor de coordenada Down diminui, dado que Down é positivo para baixo.
Por outro lado, o INS (Sistema de Navegação Inercial) de um navio funciona rastreando seu movimento em relação ao quadro NED. À medida que a embarcação se move para o leste, sua coordenada Leste aumenta. Por outro lado, quando a embarcação mergulha, sua coordenada Down aumenta.
Um carro autônomo utiliza o quadro NED para determinar sua posição. A coordenada Norte do veículo aumenta à medida que ele se move para o norte, enquanto solavancos ou quedas no terreno causam mudanças no valor Down.
Munições guiadas com precisão dependem do quadro NED para ajustar sua trajetória. À medida que um míssil desce em direção ao seu alvo, a coordenada Down aumenta, garantindo uma mira precisa.
AUVs (Veículos Subaquáticos Autônomos) utilizam o quadro NED para navegar. Quando um AUV se move na direção nordeste, as coordenadas Norte e Leste aumentam, enquanto as mudanças na profundidade afetam a coordenada Down.
O sistema NED foi desenvolvido para alinhar os movimentos com a orientação natural da Terra, simplificando assim a navegação. Este sistema é utilizado por engenheiros, pilotos e cientistas para aumentar a precisão em aplicações de posicionamento, orientação e controle.