
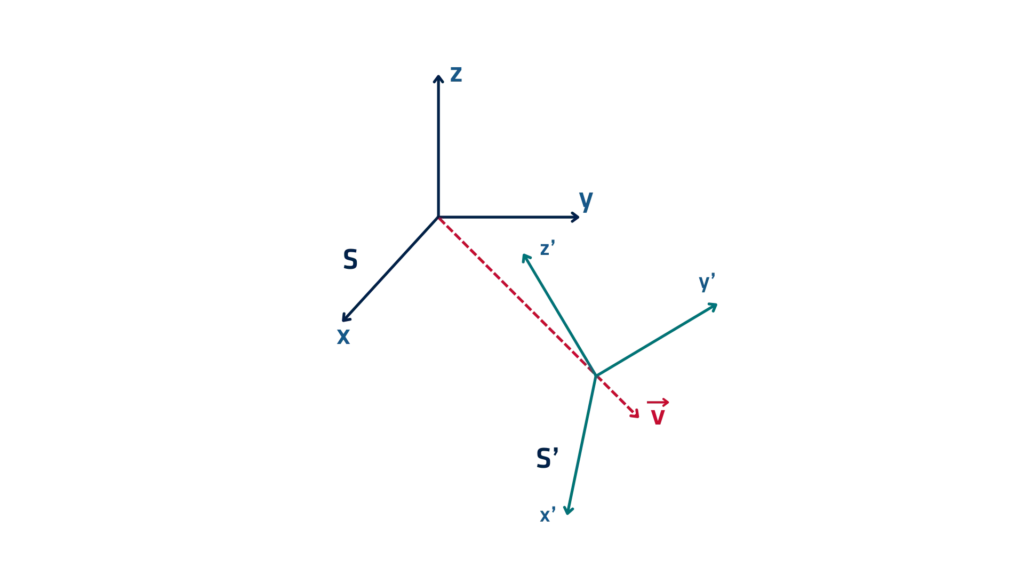
Um sistema de referência inercial é um sistema de coordenadas no qual os objetos seguem as leis de movimento de Newton sem a necessidade de levar em conta forças fictícias ou externas. Em outras palavras, é um sistema não acelerado — em repouso ou movendo-se em velocidade constante — onde um corpo permanece em repouso ou continua em movimento uniforme, a menos que seja influenciado por uma força externa. Cientistas e engenheiros confiam em sistemas inerciais para analisar o movimento com precisão em sistemas espaciais, de aviação, marítimos e de robótica.
Características definidoras
Um sistema inercial não acelera nem gira. Essa estabilidade o torna ideal para aplicar a segunda lei de Newton, F = ma, sem introduzir forças de correção como as forças de Coriolis ou centrífugas. Por exemplo, o espaço fora da atmosfera da Terra pode se aproximar de um sistema inercial porque há perturbação gravitacional ou influência rotacional mínima. Isso o torna perfeito para a dinâmica de espaçonaves e modelagem de movimento de satélites.
Em missões espaciais, os engenheiros usam um sistema de referência inercial para calcular as trajetórias das espaçonaves. Quando um satélite é lançado, o controle da missão define sua posição e velocidade inicial em um sistema inercial. À medida que o satélite se move, ele continua em seu caminho previsto, a menos que os propulsores apliquem força.
Outro exemplo é na navegação de aeronaves. Embora a superfície da Terra não seja um sistema inercial perfeito devido à sua rotação, os sistemas de navegação inercial (INS) de alta precisão a bordo de jatos e mísseis aproximam o movimento dentro de um sistema inercial por curtos períodos. Isso permite que esses sistemas forneçam dados precisos de posição e velocidade sem GPS.
Durante a navegação subaquática, os submarinos geralmente operam sem sinais externos. Seu INS estima a posição com base em uma suposição de sistema inercial, usando acelerômetros e giroscópios para rastrear o movimento ao longo do tempo.
Em robótica, os engenheiros simulam o movimento do robô usando sistemas inerciais em ambientes virtuais. Ao ignorar o atrito ou interferências externas, eles podem modelar e otimizar com precisão o planejamento de caminhos e os algoritmos de controle.
Limitações e Correções
Embora os verdadeiros referenciais inerciais não existam na Terra devido à sua rotação e gravidade, os cientistas usam referenciais pseudo-inerciais para fins práticos. Eles aplicam correções usando dados de referência (por exemplo, INS/GNSS ou rastreadores de estrelas) para manter a precisão em medições de longo prazo.
Os referenciais inerciais são fundamentais para entender e prever o movimento. Ao assumir um ambiente estável e livre de forças, os engenheiros podem projetar sistemas de navegação, trajetórias de voo e controles robóticos confiáveis em várias aplicações avançadas.