
O sistema de coordenadas do sensor ou sistema de coordenadas do corpo é um sistema de referência local que se move com um sensor ou plataforma, como um drone, veículo, robô ou míssil. Ele define a orientação e o movimento em relação à estrutura física do sensor. Os engenheiros usam o sistema de coordenadas do corpo para expressar medições como aceleração, taxa angular e velocidade diretamente da perspectiva do sensor.
O sistema de coordenadas do sensor (corpo) — frequentemente chamado de sistema de coordenadas do corpo ou sistema de coordenadas do veículo — serve como um sistema de referência fixo a uma plataforma móvel, como um drone, carro, míssil ou veículo subaquático. Os engenheiros usam este sistema para descrever o movimento e a orientação da plataforma em relação a si mesma, tornando-o essencial para navegação, controle e fusão de sensores.
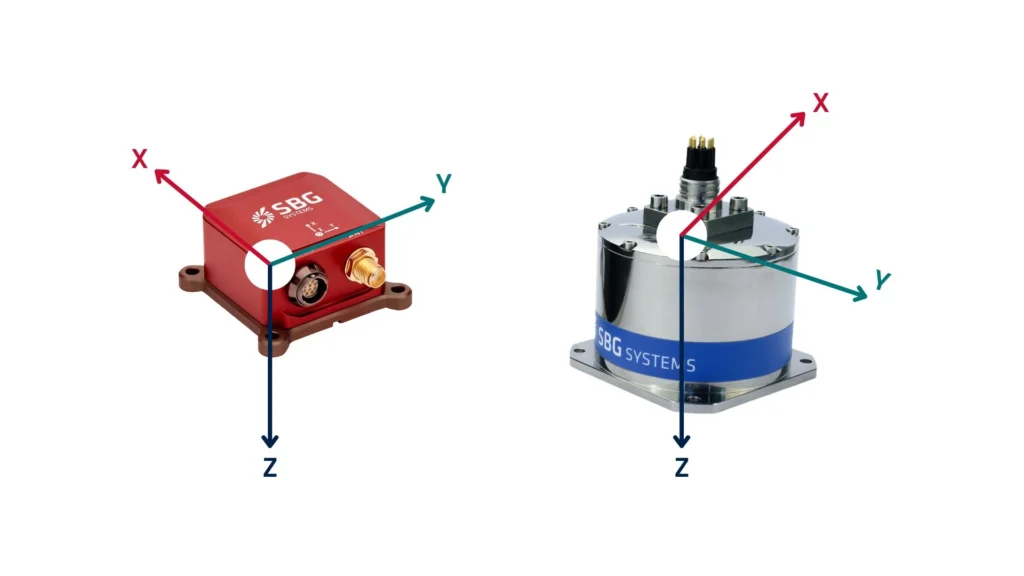
Na maioria das aplicações, os usuários montam sensores como IMUs, receptores GNSS ou unidades AHRS diretamente no veículo. Esses sensores reportam dados em seu próprio sistema de coordenadas, que geralmente coincide com o sistema de coordenadas do corpo. Ele consiste em três eixos ortogonais formando um sistema de coordenadas destro:
- O eixo X aponta para frente, na direção do movimento ou do nariz do sensor.
- O eixo Y aponta para a direita (estibordo para sistemas marítimos ou aeronáuticos).
- O eixo Z aponta para baixo ou para baixo em relação à base do sensor, dependendo da aplicação.
Essa orientação fixa permite que o sistema meça como ele se move ou gira em seu próprio espaço, em vez de em relação à Terra.
Exemplos de Aplicações de Estrutura de Carroceria
O IMU de um drone é responsável por medir a aceleração e a rotação em seu próprio sistema de referência. Quando o drone se inclina para frente, ele detecta a velocidade angular em torno de seu eixo Y. O sistema transmite esses dados ao controlador de voo, permitindo que o drone estabilize e execute comandos de voo com precisão. Por exemplo, o sistema de piloto automático do drone utiliza dados do sensor no frame do corpo para estabilizar o voo e executar manobras como yaw, pitch e roll. O sistema interpreta os movimentos diretamente, expressando-os como movimentos para frente, laterais e verticais em relação ao próprio frame do drone.
Um carro autônomo, por outro lado, detecta sua aceleração linear ao longo dos eixos X (para frente), Y (lateral) e Z (vertical) em seu frame do corpo. Essa capacidade permite que o veículo ajuste sua velocidade, mantenha o controle da faixa e responda às mudanças no terreno. Este frame de coordenadas facilita a interpretação de dados de lidar, radar e inerciais. O sistema de controle do carro usa essas leituras para tomar decisões de direção em tempo real com base em sua própria orientação.
O sistema de navegação de um míssil utiliza o frame do corpo para rastreamento de orientação. À medida que ele manobra, o sensor de bordo detecta taxas de rotação e aceleração em eixos fixos ao corpo, permitindo correções de curso precisas. O sistema de navegação de bordo do míssil utiliza o frame do corpo para rastrear a aceleração e a velocidade angular, permitindo que ele ajuste sua trajetória e orientação com base em sua posição atual e na orientação do frame de coordenadas.
Um braço robótico emprega um frame do corpo para calcular os movimentos das articulações e as posições do efetuador final. A posição e a orientação de cada motor são medidas neste frame local para garantir o controle em tempo real.
Desafios de Alinhamento de Sensores
Em aplicações práticas, os sensores nem sempre estão perfeitamente alinhados com a estrutura do corpo. Para resolver isso, os engenheiros frequentemente implementam correções de rotação de quadro, que alinham o sistema de coordenadas do sensor com a estrutura do corpo do veículo. Isso garante leituras precisas para cálculos relacionados à posição, velocidade e orientação. É fundamental para qualquer sistema que se move e sente seu ambiente. Desempenha um papel vital na navegação, controle e estabilização em tempo real, tornando-o essencial em sistemas aeroespaciais, de defesa, automotivos e de robótica.
Fale-nos sobre seu projeto