PPK (Cinemática Pós-Processada) é um método de processamento de dados GNSS que alcança um posicionamento de alta precisão, corrigindo erros nos dados de posicionamento brutos. O pós-processamento é amplamente utilizado em aplicações que exigem informações geoespaciais precisas, como levantamento, mapeamento e operações com UAVs.
A SBG Systems desenvolveu uma solução interna de pós-processamento GNSS para melhorar o desempenho de seus sistemas de navegação inercial.
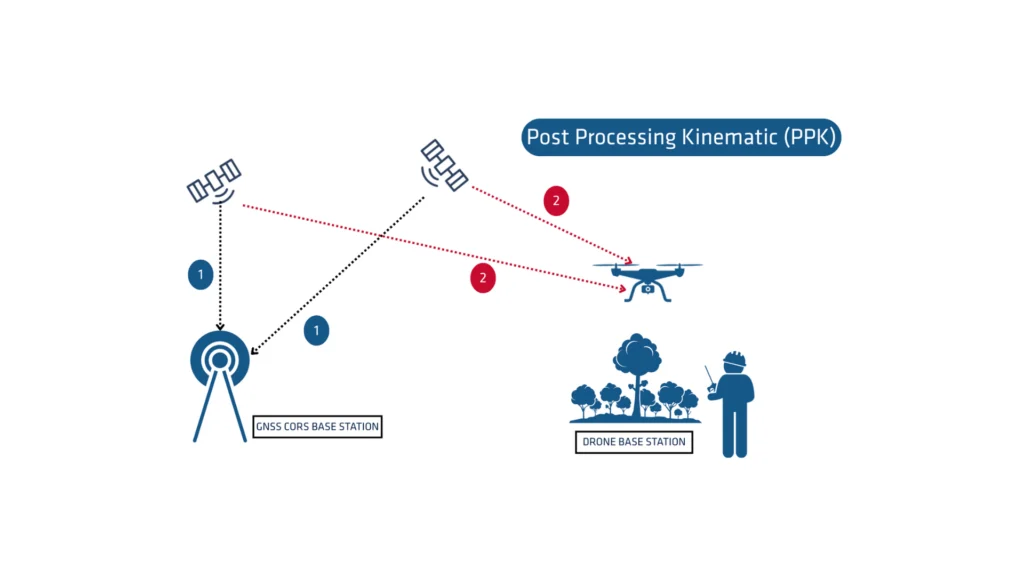
O que é pós-processamento GNSS?
O pós-processamento PPK é uma abordagem onde o sistema processa as medições de dados GNSS brutos registradas em um receptor GNSS após a aquisição de dados. Você pode combiná-los com outras fontes de medições GNSS para fornecer a trajetória cinemática mais completa e precisa para o receptor GNSS, mesmo nos ambientes mais desafiadores.
Essas outras fontes podem ser uma estação base GNSS local, dentro ou perto do projeto de aquisição de dados, ou estações de referência de operação contínua (CORS) existentes, normalmente oferecidas por agências governamentais e/ou provedores de rede CORS comerciais.
Um software de Cinemática Pós-Processada (PPK) pode usar informações de órbita e relógio de satélite GNSS disponíveis gratuitamente para ajudar a melhorar ainda mais a precisão. O PPK permite a determinação precisa da localização de uma estação base GNSS local em um datum de sistema de referência de coordenadas global absoluto, que ele usa.
O software PPK também pode suportar transformações complexas entre diferentes sistemas de referência de coordenadas em suporte a projetos de engenharia.
Em outras palavras, ele dá acesso a correções, melhora a precisão do projeto e pode até reparar perdas de dados ou erros durante o levantamento ou instalação após a missão.
RTK vs PPK
A Cinemática em Tempo Real (RTK) é uma técnica de posicionamento que transmite correções GNSS quase em tempo real, normalmente usando um fluxo de correção de formato RTCM. No entanto, pode haver desafios para garantir as correções GNSS, especificamente sua integridade, disponibilidade, cobertura e compatibilidade.
O PPK oferece a grande vantagem de otimizar as atividades de processamento de dados durante o pós-processamento, incluindo o processamento para frente e para trás. Em contrapartida, o processamento em tempo real pode sofrer interrupções ou incompatibilidades nas correções e em sua transmissão, levando a um posicionamento de menor precisão.
Uma primeira vantagem importante do pós-processamento GNSS PPK vs. tempo real (RTK) é que o sistema usado em campo não precisa ter um datalink/rádio para fornecer as correções RTCM provenientes do CORS para o sistema INS/GNSS.
A principal limitação para a adoção do pós-processamento é a exigência de que a aplicação final atue no ambiente. Por outro lado, se sua aplicação puder suportar o tempo de processamento adicional necessário para produzir uma trajetória otimizada, isso melhorará muito a qualidade dos dados para todas as suas entregas.
Como o processamento forward e backward melhora a precisão dos dados?
Vamos imaginar que temos uma interrupção do GNSS de 60 segundos no meio de nossa pesquisa. O erro de posição no processamento direto cresce rapidamente (a taxa depende das especificações da IMU e outros parâmetros) e atinge seu máximo no final da interrupção. Então, ele se recupera rapidamente.
No pós-processamento, fingimos que o tempo flui para trás e fazemos o processamento em ordem anti-cronológica, pois as equações físicas permanecem válidas. Neste processamento reverso, o erro seria máximo no início real da interrupção do GNSS de uma forma muito simétrica ao processamento direto natural.
A fusão desses dois resultados de cálculo resulta em um erro máximo em torno do meio da interrupção, com uma magnitude muito menor do que as soluções somente forward ou somente backward. Isso melhorará especialmente as soluções GNSS+INS, conforme permitido pelos produtos SBG Systems, mas o processamento somente GNSS também se beneficiará desse fluxo de trabalho.
Como afirmado anteriormente, o pós-processamento é a única maneira de alcançar essa melhoria porque você precisa de todos os dados do início ao fim, o que atrasa seu uso até o final da pesquisa.
Acessível a todas as aplicações de levantamento
O RTK é amplamente utilizado para posicionamento GNSS de alta precisão em mapeamento, controle de construção e aplicações marítimas que exigem resultados em tempo real. O pós-processamento de dados INS beneficia aplicações UAV e USV onde a implementação de rádio e o monitoramento do fluxo de correção RTCM são desafiadores.
Os topógrafos aéreos tendem a usar PPK, porque os datalinks para aviões são difíceis de fazer, pois a rede celular funciona mal em altitude devido à orientação das antenas de transmissão terrestre.
Outras aplicações que necessitam de Cinemática de Pós-processamento são aquelas onde os dados (dados de imagem ou LiDAR, por exemplo) são processados em um fluxo de trabalho subsequente, muitas vezes na nuvem, e onde o processamento da trajetória com um software de pós-processamento GNSS como o Qinertia pode ser facilmente adicionado.